基于PARK-Clark的双闭环PI的永磁同步电机SVPVM控制系统simulink仿真
Posted fpga和matlab
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于PARK-Clark的双闭环PI的永磁同步电机SVPVM控制系统simulink仿真相关的知识,希望对你有一定的参考价值。
目录
一、理论基础
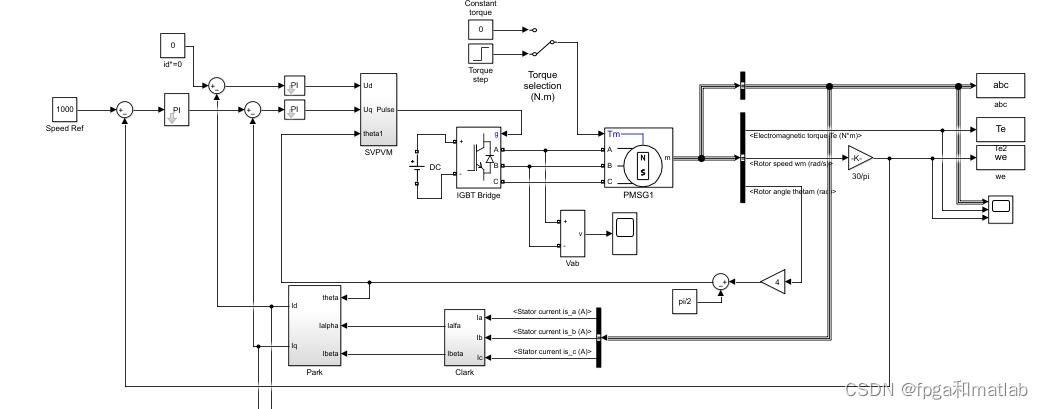
SVPWM算法很适合在数字系统中使用,有很高的直流电压利用率,而且可以有效降低电机的转矩脉振和噪音,其基本结构如下:
三相静止ABC坐标系下的交流信号跟踪问题,在经过Clark变换和Park变换后,转换为两相旋转坐标系下的直流信号跟踪问题,于是,同志们又可以愉快的使用PID控制了。
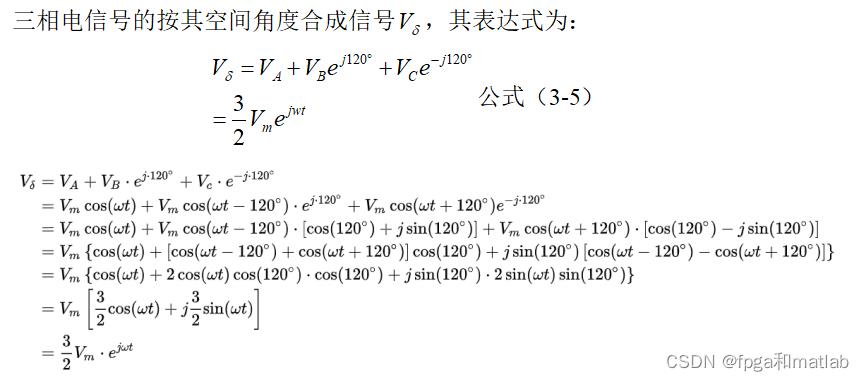
瞬时空间磁链矢量圆轨迹法(SVPWM)就是在很短的一段时间间隔内,通过对电压型逆变器的开关状态的线性组合,得到磁链矢量轨迹为圆形的PWM方式。SVPWM控制算法的思想是:运用定子磁链空间矢量跟踪的思想,在正弦波永磁同步电机内部空间产生旋转的圆形磁场,从而产生稳定的电磁转矩。
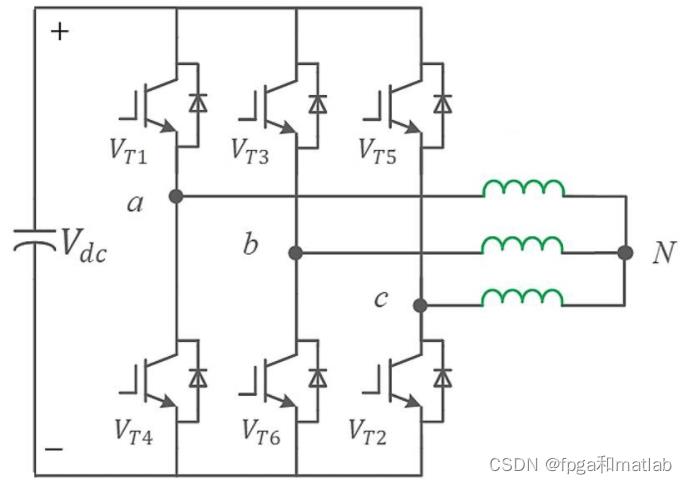
三相逆变器对PMSM供电时,SVPWM技术产生的PWM波控制着三相逆变器的六个开关管的开通与关闭。逆变器结构如图1所示,逆变器由三个桥臂六个开关管组成,为避免短路,逆变器同一个桥臂上的两个电子开关交替导通。
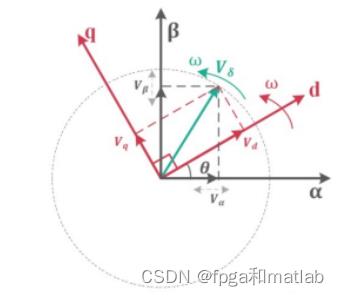
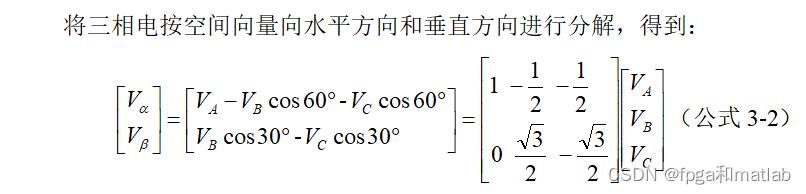
1.1PARK变换
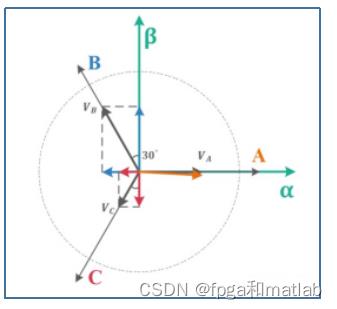
1.2CLARK变换
二、核心程序
function [sys,x0,str,ts] = func_N_calculation(t,x,u,flag)
%A=0;B=0;
%C=0;N=0;
global A B C N;
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=[];
case 2,
sys=[];
case 3,
sys=mdlOutputs(t,x,u,A,B,C,N);
case 4,
sys=[];
case 9,
sys=[];
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 3;
sizes.NumOutputs = 1;
sizes.NumInputs = 2;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
x0 = [0 0 0];
str = [];
ts = [0 0];
%u(1)=Uafa;u(2)=Ubta
function sys=mdlOutputs(t,x,u,A,B,C,N)
x(1)=u(2); %x(1)=Ua
x(2)=1/2*(sqrt(3)*u(1)-u(2)); %x(2)=Ub
x(3)=1/2*(-sqrt(3)*u(1)-u(2)); %x(3)=Uc
if (x(1)>0); %A
A=1;
else
A=0;
end
if (x(2)>0); %B
B=1;
else
B=0;
end
if (x(3)>0);
C=1; %C
else
C=0;
end
N=4*C+2*B+A; %N
sys=N;function [sys,x0,str,ts] = func_T1T2_cal(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=[];
case 2,
sys=[];
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=[];
case 9,
sys=[];
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 2;
sizes.NumInputs = 5;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1; % at least one sample time is needed
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [0 0];
%u(1)=N;u(2)=Uafa;u(3)=Ubta;u(4)=Udc;u(5)=Ts
function sys=mdlOutputs(t,x,u)
global T1 T2 Ts
Ts=u(5);
switch u(1)
case 1
T1=-1*u(2)+3^0.5/3*u(3);
T2=1*u(2)+3^0.5/3*u(3);
case 2
T1=1*u(2)+3^0.5/3*u(3);
T2=0*u(2)-2*3^0.5/3*u(3);
case 3
T1=1*u(2)-3^0.5/3*u(3);
T2=2*3^0.5/3*u(3);
case 4
T1=-2*3^0.5/3*u(3);
T2=-1*u(2)+3^0.5/3*u(3);
case 5
T1=2*3^0.5/3*u(3);
T2=-1*u(2)-3^0.5/3*u(3);
case 6
T1=-1*u(2)-3^0.5/3*u(3);
T2=1*u(2)-3^0.5/3*u(3);
end
T1=T1*u(5)/u(4)/2*3;
T2=T2*u(5)/u(4)/2*3;
if (T1+T2<=Ts);
sys(1)=T1;
sys(2)=T2;
else
sys(1)=T1*Ts/(T1+T2);
sys(2)=T2*Ts/(T1+T2);
end
三、仿真测试结果
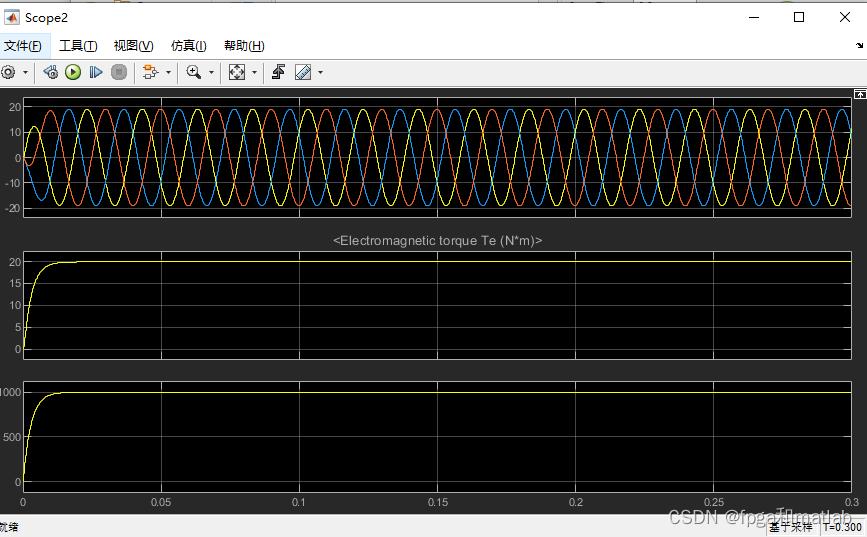
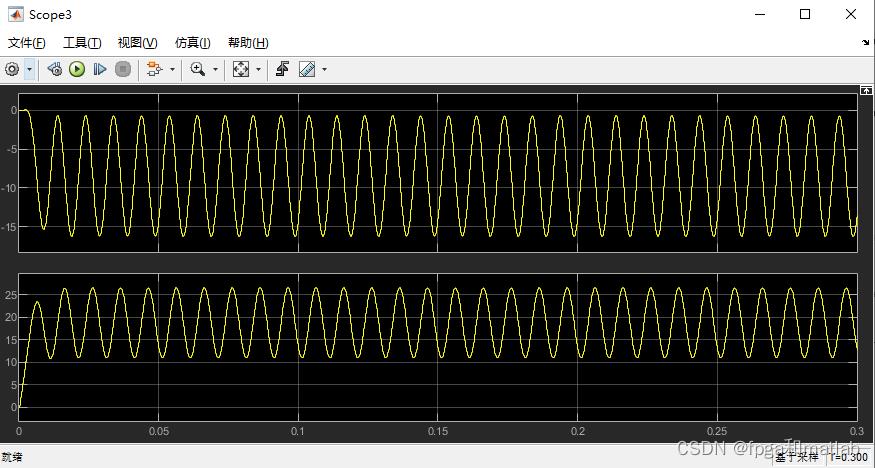
A22-04
以上是关于基于PARK-Clark的双闭环PI的永磁同步电机SVPVM控制系统simulink仿真的主要内容,如果未能解决你的问题,请参考以下文章