基于无速度传感器的永磁同步电机矢量控制研究
Posted studyer_domi
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于无速度传感器的永磁同步电机矢量控制研究相关的知识,希望对你有一定的参考价值。
19世纪90年代,美国西屋电气公司研制出了世界上第一台交流同步电机。随着科学技术的迅猛发展和生产工艺的持续进步,在20世纪50年代出现了永磁同步电机。它以永磁体代替电励磁绕组,使电机结构变得简单,同时还省去了容易出问题的集电环和电刷。80年代稀土永磁材料研究取得突破性进展。尤其是第三代永磁材料钕铁硼(NdFeB)的出现,极大地促进了永磁同步电机在电气传动领域的广泛应用。相比普通电机,永磁同步电机的功率因数更高,能量密度更大,体积重量更小且更加节能环保。随着工业自动化的深入发展,永磁同步电机必将取代普通电机,成为当今世界的主流电机。
当前交流调速领域的一大研究热点就是无速度传感器技术。因在系统中不需要安装价格昂贵的速度传感器,既可节约成本减少维护费用又能增强系统自身的稳定性。这些年来,针对无速度传感器技术的研究从来没有停止过。为此专家学者们提出了各种各样的转速估算策略,本文根据现场情况,采用了基于模型参考自适应系统的转速辨识策略,此策略中包含两个模型,即以待估算的转速信息为变量而建立的可调模型和以实际参数建立的参考模型。两模型可输出有相同含义的物理量,再将其偏差信号送入系统的自适应律就能进行速度辨识了。我们利用波波夫超稳定性理论来设计自适应律,同时验证基于此自适应律的系统是渐进稳定的。最后通过仿真软件验证了所设计的转速辨识策略是可靠的。
利用模糊逻辑推理设计了模糊PI控制器,并在此基础建立了矢量控制系统。它对系统的速度环和转矩环进行了优化,因此具有更好的实时跟踪性能,更快的响应速度,更优的鲁棒性。通过 Matlab/Simulink中搭建的仿真模型,进一步验证了所设计的系统具有良好的动态性能和稳定性。
基于TMS320F2812芯片搭建了系统的实验验证平台,编写了相应的软件程序,通过大量的实验波形和数据证明本文所设计的系统性能良好,稳定可靠。
2.1永磁同步电机的类型及结构
电励磁的交流三相同步电机经过改进和完善,就出现了永磁同步电机。它在转子上用磁特性优异的永磁体取代了电励磁系统,省去了耗能的励磁绕组和电刷,而定子系统与电励磁同步电机是相同的,所以被称为永磁同步电动机(Permanent Magnet Synchronous Motor, PMSM)。PMSM的转子结构,就永磁体安装方式来分,可分成表面式、嵌入式以及内埋式3种,如图2-1所示。
图2-1 永磁同步电机结构图
图2-1(a)表面式PMSM的永磁体结构为瓦片状,转运惯量小,重量轻,具有良好的动态性能,容易达到励磁磁场正弦分布要求,一般适用于中低速传动系统。图2-1(b)嵌入式PMSM因转子的磁路不完全对称而存在着磁阻转矩,功率密度很高,动态性能很理想,大量应用于中高速传动系统。图2-1(c)内埋式PMSM由于机械强度高,并且能存储较多的磁能,具有很大的电磁转矩与过载能力,因此比较适合高速大功率传动系统。表面式PMSM的交直轴电感相当接近,属于隐极式同步电机,而嵌入式PMSM和内埋式PMSM的交直轴电感完全不同,则属于凸极式同步电机。
2.2 坐标变换
坐标变换的目的是简化原有电机模型非线性和多变量等困难,它的基本思路是在保证变换前后的磁动势等效即维持功率不变的情况下,用一组新的方程组来取代原方程组,用一套新的变量来代替原方程组里的旧变量,实现减少变量和简化模型的目的。基于矢量控制方法的永磁同步电机,经过克拉克(Clarke)变换与派克(Park)变换后可将三相静止坐标系下的复杂变量转换成两相旋转坐标系下的直流量,这样,坐标变换后的永磁同步电机数学模型大为简化,不仅减少了电机控制变量的也降低了其控制难度。
(1)克拉克变换
在三相静止坐标系中,往静止绕组A、B、C中分别注入相互对称的三相正弦电流、、,依据安培环路定理,最终能合成一个以同步速旋转的磁动势FS。而若在两相静止坐标系中,让α轴与A轴重合且滞后于β轴900,并在两个静止绕组中注入相位差900的两相交流电流、,根据变换前后磁动势等效原则,如果两相电流产生的磁动势与三相正弦电流产生的磁动势完全等效,那么在同一控制系统中它们所产生的作用也是完全相同的。克拉克变换实现了从三相静止坐标到两相静止坐标之间的变换。
参照图2-2在变换前后功率不变的条件下,利用三角函数关系就能得到两个坐标系之间的变换矩阵。此变换称为克拉克变换,它实现了由静止的三相坐标转化为两相坐标,简化了变量,方程关系式如(2-1)所示:
而反过来,从两相静止坐标系转换成三相静止坐标的变换叫换克拉克逆变换(又称2S/3S变换),其关系式如式(2-2)所示:
通过Clark变换实现了从三相交流量到两相交流量的转换。三相静止坐标系ABC中的三个交流量,经过克拉克变换后变成了两相静止坐标系中的两个交流量,且α轴与β轴之间相互正交,便于进一步分析。
(2)派克变换
在两相静止坐标系中,依然为时变的正弦量,为了进一步简化模型,使交流电机能获得相似于直流电机的控制方式,我们可以把两相静止坐标系进一步转换为两相旋转坐标系,即用两个旋转的直流量来替换时变的交流量,并保证变换前后磁动势等效。图2-3为坐标变换的示意图。
由图2-3可以发现,两相旋转坐标系的dq轴之间相互垂直,并以同步速度旋转,d轴滞后于α轴θ角。同样可以利用简单的函数关系即可得出坐标变换的对应关系式。从两相静止坐标系到两相旋转坐标系的变换,称为派克变换(2s/2r变换),变换方程如式(2-3)所示:
= (2-3)
而两相静止坐标系到两相旋转坐标系之间的变换,称为派克反变换(2r/2s变换),变换方程式如式(2-4)所示:
= (2-4)
经过两次变换后的电流波形从①到②再到③,实现从交流变量到直流量的变换,如下图2-4所示:
通过图2-4可以发现,经过两次变换后,三相交流电流变量转换成了两相直流量,这样当我们就能够借用直流电机的控制方式对交流电机进行控制,降低了控制难度,同时提高了响应速度。
2.2 永磁同步电机的数学模型
数学模型是通过建立相应数学规则的方法来对实际系统作近似的估计,它可以根据对应的方程表达出实际系统的性能与各物理量之间的关系。永磁同步电机控制理论的基础是建立永磁同步电机的数学模型上的,模型的精确程度对控制系统的研究与实现有着非常重要的意义。在对永磁同步电机数学模型进行研究时,作如下理想化假设:
- 定子和转子磁动势所产生的磁场均呈正弦分布,忽略一切空间谐波;
- 定子绕组的自感和互感不随电机状态的变化而变化;
- 忽略涡流、磁饱和和铁芯损耗;
- 转子磁链在气隙中呈正弦分布,且转子上没有阻尼绕组也不存在阻尼作用。
2.2.2 在dq旋转坐标系上的数学模型
在上一节中可以看到在三相静止坐标系中,PMSM的数学模型中存在多个变量,非常复杂,不能实现解耦控制。但我们可以利用克拉克变换和派克变换,达到减少变量简化模型,实现解耦控制的目的。
经坐标变换后的数学模型能够直观地表示出电压、电流和磁链等各个物理量之间的关系,可以简单高效地对永磁同步电机的动静态特性进行研究。它是目前研究PMSM最广泛使用的一种数学模型。
轴定子电感;转子角速度;定子电阻。
2.3 空间矢量脉宽调制技术
空间矢量脉宽调制(Space vector pulse width modulation,SVPWM)技术的基本原理是把电机负载和逆变器电源当作一个整体,其目的是在电机中产生恒定不变的圆形旋转磁链。通过对逆变器的开关状态进行组合调节,产生出六个基本电压矢量,然后运用平均值等效原理,即在一个开关周期内,由基本电压矢量任意组合而成的新矢量平均值与给定电压矢量相等。这样,新矢量产生的磁链轨迹就能无限接近圆形轨迹。采用旋转的圆形磁链轨迹能大大减少转矩脉动,提高直流电压利用率。同时此技术简单直观,实用性强,易于DSP的实时控制。
图2-5 电压源逆变器示意图
图2-5为三相电压源逆变器的示意图,VT1-VT6为IGBT元件,同时每个元件的C、E极之间并联了续流二极管VD1-VD4。图中共有三个桥臂,每个桥臂有上下两个开关器件。同一桥臂上的两个开关管轮流导通,即一个开关管导通另一个开关管断开。通常为了防止出现短路,在上下开关管的动作之间会加入一段死区时间,以保证逆变器的工作可靠。令直流侧中点0为参考点,分别用1和0来表示开关管的开通与关断,则由UA,UB,UC的正负设定的二进制编码a、b、c的值如下所示:。
若UA>0,则a=1,否则a=0;
若UB>0,则b=1,否则b=0;
若UC>0,则c=1,否则 c=0;
由表2-1 可知,状态矢量U0(000)和U7(111)在表中对应的电压矢量为零,因此称为零矢量而其余的6个状态矢量对应的电压幅值大小均为2Udc/3,因此称为基本电压矢量,如图2-6所示:
图2-6 电压矢量状态图
观察2-6可发现,整个矢量空间被均分成了6个面积相等的扇区,每个扇区的角度为60度。由此,6个基本电压矢量就构成了正六边形磁链轨迹。磁链矢量每旋转一周,6个非零电压矢量依次选用一次,开关损耗小,但是当电机运行在低速区时,定子电流的5次、7次谐波分量很大,会引起较大的转矩脉动。由电机理论可知,只有构建近似圆形磁链才能有效地降低谐波含量,减少转矩脉动。我们可以利用相角连续、幅值不变的电压空间矢量产生近似圆形定子磁链轨迹。而现有的6个基本电压矢量只能合成正六边形磁链却不能合成近似圆形旋转磁链。因此,根据数学上的“近似无限逼近”思想,我们可以试着增加六边形的边数,当边数趋于无穷多时,就能无限接近圆形。在这一思想的引导下,可以利用这6个基本电压矢量来任意组合系统需要的电压矢量Uout,从而产生理想的圆形磁链。由简单的三角函数关系可知,Uout的最大幅值为U/。实际上逆变器所产生的电压矢量是有限的,无法产生角度连续变化的空间矢量。所以要想得到旋转的等效空间电压矢量,必须利用各基本矢量作用时间的不同来进行合成。然而在一个正弦周期内新合成的矢量越多,开关频率就越高,开关损耗也就越大。因此我们要合理选择矢量来等效合成空间矢量。
如果以第1扇区为例,合成的步骤如下:
图2-7 空间电压矢量等效合成示意图
图2-7中,Uout为合成的任意角度电压矢量,T1、T2为两个不同基本电压矢量的作用时间,T为PWM波的一个周期,通常情况下有T=T1+T2+T0,其中T0为零矢量时间。
由简单的对应关系可知:
(2-13)
将Uout分解到αβ坐标系可得:
(2-14)
式(2-14)中的Uα,Uβ分别为电压矢量Uout在αβ坐标轴上的两个独立分量,其中,电压矢量U4,U6的幅值均为2Udc/3,由此可得:
(2-15)
在每个扇区,T1,T2的几何关系都是适用的,以此类推,可以得出其余扇区的作用时间。我们在这里这里引入X,Y,Z三个变量,将各个扇区基本电压矢量的作用时间都表示出来,定义如下:
(2-16)
在不同扇区其对应关系如表2-2所示:
| 扇区 | 1 | 2 | 3 | 4 | 5 | 6 |
| T1 | -Z | Z | X | X | -Y | Y |
| T2 | X | Y | -Y | Z | -Z | -X |
根据表2-2可以计算出在不同扇区T1,T2的值。零矢量作用时间为T0=T-T1-T2;当T>T1+T2时,欠饱和状态,此时可让零矢量作用一段时间,计算出来的T1,T2即为基本电压矢量作用时间;当T<T1+T2时,出现饱和,需要重新选择矢量进行组合处理,T1,T2的求解表达式如下:
(2-17)
Uout所在扇区判断方法如下:
定义三个自变量A,B,C,若Uβ>0,则A=1,否则A=0;若Uα+Uβ>0,则C=1,否则C=0;若Uα-Uβ>0,则B=1,否则B=0; 扇区N=A+2B+4C
T1,T2与扇区确定后,需要计算电压空间矢量的切换点,如式(2-18)所示:
(2-18)
根据ta,tb,tc可计算出用于生成三相PWM信号的矢量切换点Tcm1,Tcm2,Tcm3,它们之间的对应规则如表2-3所示。
| 扇区 | 1 | 2 | 3 | 4 | 5 | 6 |
| TCm1 | ta | tb | tc | tc | tb | ta |
| TCm2 | tb | ta | ta | tb | tc | tc |
| TCm3 | tc | tc | tb | ta | ta | tb |
根据表2-3将需要合成的Uout的参数送入微处理器的寄存器中,再与控制周期和节点进行对比,最后实现物理上PWM波形完整输出。由于SVPWM技术易于实现,可靠性高,结构简单。因此,在电机调速系统中得到广泛应用。
2.4 永磁同步电机的矢量控制与仿真
2.4.1 永磁同步电机矢量控制方法
矢量控制的基本思路是根据电机数学模型,经过两次坐标变换,利用磁场定向控制原理,实现解耦控制,最终达到与直流电机相类似的调速性能。具体方法为:利用上文所讲的Clark变换和Park变换,实现由三相静止坐标到两相旋转坐标的变换,然后将PMSM定子三相电流分解为两个独立的电流分量,其中与转子磁链同方向的用于产生励磁电流的称之为励磁分量,与转子磁链方向垂直的用于产生电磁转矩的称为转矩分量,两个分量相互垂直,可独立控制,实现解耦,由此就可得到与直流电机相媲美的调速控制性能。
调速系统控制的核心是电机的电磁转矩,获得响应速度快、脉动小、稳态精度高和功率因数高的电磁转矩和功率是每一种电机控制策略所追求的共同目标。而电机的转速、自身结构参数、输入电压,负载扰动等都会影响电磁转矩和调速性能。在各方面参数变化时,如何实现电机转矩的精准控制,使电机的传动系统所受影响降到最低并能立即恢复到正常状态,保证其整个调速控制系统的抗扰性能和稳定性呢?目前来讲,基于PMSM矢量控制调速控制主要有以下几种方法:
(1)控制
此方法由于控制简单直接,计算量小,可靠性高,适用性强等,在PMSM矢量控制中广泛应用。进行id=0控制时,令d轴电流为零,此时电枢中只有转矩分量没有励磁分量,不会产生去磁效应。依据磁链方程有:,电磁转矩与转矩分量电流(q轴电流分量)成线性关系。此时的转矩方程变为:
(2-19)
由式(2-19)可以看出,因为PMSM中是一定的,转矩与sinβ成线性对应。当相位角β=900时,可输出最大转矩。
但它的缺点是:一方面当负载增大时,电机输出转矩也随之增大,由于存在电枢反应,定子电流和反电动势都会增加,从而导致定子电压升高,变流器必需要有很高的容量,这样一来电源利用率较低;另一方面,由于电枢反应影响,当负载增大时,定子电压降升高,与电流矢量的夹角也随之变大,导致功率因数降低。
(2)弱磁控制
现代PMSM研究的一个新热点就是弱磁控制,它的思路是通过增大定子d轴反向电流分量来增加去磁电流,减小q轴正向电流分量来减少励磁电流,达到保持定子电压恒定的目的,从而提升电机转速,实现额定转速以上的弱磁调速。由于永磁同步电动机(PMSM)想要提高转速,就要保证电机在恒功率区范围内运行,而此时电压要想维持恒定就必须降低励磁电流,即在相同电压的条件下,我们可以通过减小励磁电流来实现弱磁提速。
(3)最大转矩电流比控制
最大转矩电流比(MTPA)控制也叫单位电流最大转矩输出控制。对于表贴式PMSM,当id=0控制也可以称作MTPA控制,因为它的转矩中不含磁阻转矩。但此方法大多数情况下应用于凸极式PMSM控制中,它能充分利用磁阻转矩,产生相同的电磁转矩所需的定子电流更小。使电机损耗小,功率因数高等。并且在输出相同转矩下,它所要求的永磁体励磁磁通小,便于弱磁控制,提高电机转速。缺点是计算相当复杂,工程上不易实现,鲁棒性也不高。
(4)单位功率因数控制
单位功率因数控制的控制策略是:使定子电流矢量和电压矢量保持同相,此时功率因数一直为1,逆变器输出都是有功功率,而无无功功率,提高了逆变器的利用率。但是,对于转子磁链是由永磁体产生的永磁同步电机时,由于永磁体的磁链是恒定的,一旦负载发生变化,电机的总磁链必定发生变化,无法保证电枢电流与转矩之间的对应关系。并且此方法还存在退磁问题,输出的最大转矩也不理想,容易引起电磁转矩和功率因数下降。
2.4.2 矢量控制系统建模
(2-20)
根据实际情况,本文采用的是id=0控制策略,由公式(2-20)可以看出Ud不仅与id有关,还与iq有关,同理Uq也一样。由于公式中存在着相互耦合项,导致系统不能对电流分开进行独立控制,改变d轴电流时,不仅对d轴电压电流产生影响,同时q轴的电压电流也会受到影响,对q轴亦是如此。当速度很大时,耦合的比重会相应增大,严重降低电流的调控精度,电磁转矩将出现很大脉动。降低了电机控制系统的稳定性。因此,首先要进行解耦处理。图2-8为PMSM的动态耦合关系图。
图2-8 PMSM动态耦合结构图
在这里,我们采用电流反馈补偿解耦,也叫电压前馈解耦控制,它的原理是将式(3-1)中的耦合电流信号反馈到电流调节器的输出端来抵消电压耦合带来的影响,仿真模块如图2-9所示。
图2-9 电流反馈补偿解耦
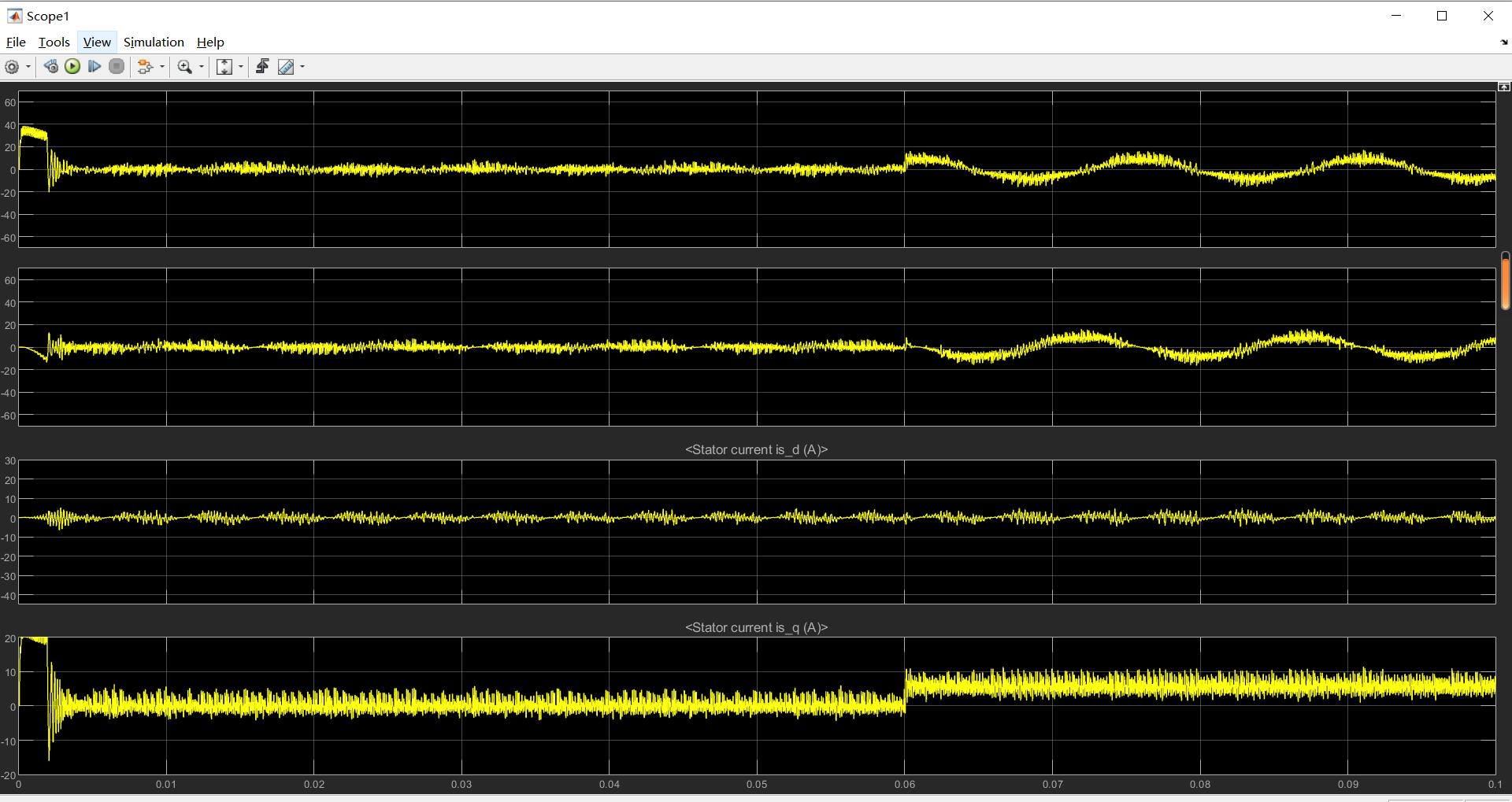
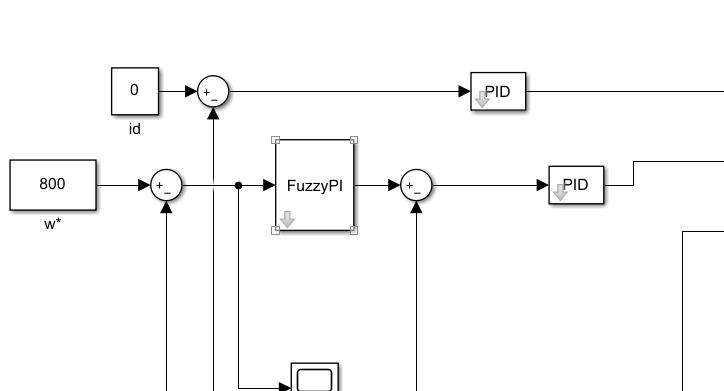
为了验证本文所搭建的PMSM矢量控制系统的可靠性和稳定性,并为基于无速度传感器下转速辨识研究打好基础,本节在Matlab/simulink中搭建了其仿真模型,其结构框图如图2-10所示
图2-10 仿真模型结构框图
关键词:永磁同步电机,无速度传感器,模型参考自适应,矢量控制,模糊推理

以上是关于基于无速度传感器的永磁同步电机矢量控制研究的主要内容,如果未能解决你的问题,请参考以下文章
永磁同步电机矢量控制(三电平)——三电平传统SVPWM调制算法原理