文献翻译阅读-NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
Posted Super__B
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了文献翻译阅读-NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis相关的知识,希望对你有一定的参考价值。
目录
信息
NeRF,即Neural Radiance Fields(神经辐射场)的缩写。研究员来自UCB、Google和UCSD。
Title:NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
Paper:https://arxiv.org/pdf/2003.08934.pdf
Code:https://github.com/bmild/nerf
简介
通过优化底层场景提出了一种新视角合成的方法,这种算法采用的是全连接的神经网络来映射场景向量,其中输入是连续的5D表示(位置信息
(
x
,
y
,
z
)
(x,y,z)
(x,y,z)+视角方向(
θ
,
ϕ
\\theta,\\phi
θ,ϕ)),输出是体积密度
σ
\\sigma
σ+该空间位置的视角相关的辐射(可以理解为color)。沿着相机光线查询5D表示来合成视图(使用经典的体渲染技术),该技术可微所以要求输入是一系列的已知相机姿势的照片。
前驱知识介绍:
- 体积密度 σ \\sigma σ:不透明度即射线通过点 ( x , y , z ) (x,y,z) (x,y,z)累计的辐射量;
- 全程使用神经网络全连接,并未使用卷积层,用的是MLP(多层感知机)去学习神经辐射场这个函数;
- 位置编码:使得MLP可表达更高频函数-解决了分辨率低问题;
- 分层抽样:解决对高频场景需充分采样问题。
- 整体步骤:
- 使用相机光线穿过场景采样一系列3D点;
- 使用这些点和其相关的2D视角方向作为NN的输入产生 σ \\sigma σ和颜色;
- 使用体渲染技术将 σ \\sigma σ和颜色生成对应的2D图像;
- 用真实图像和生成图像做均方误差优化参数。
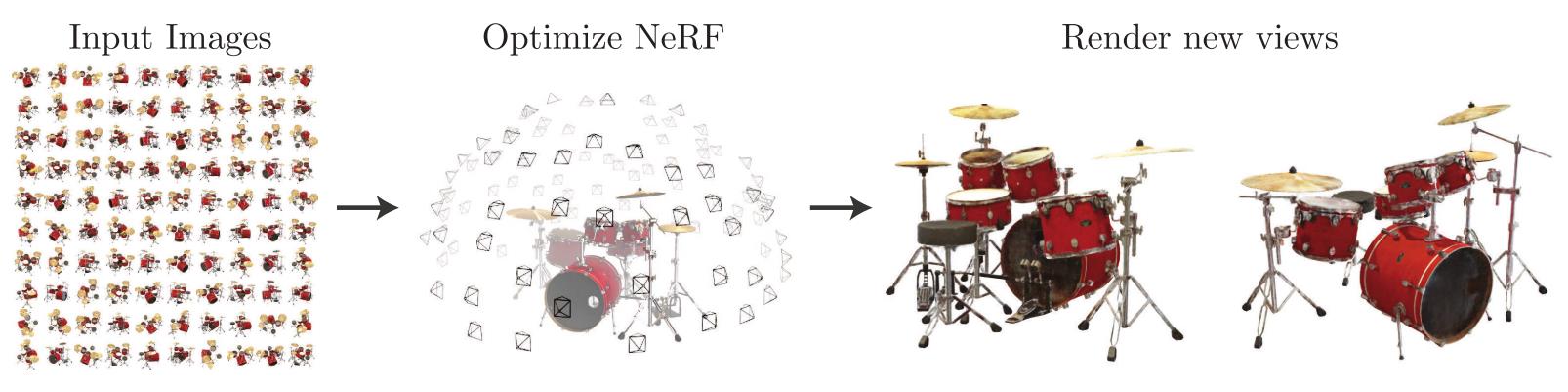
 收集上半球面的3D图像输入,即可生成各种位姿的新视角的2D图像
收集上半球面的3D图像输入,即可生成各种位姿的新视角的2D图像
nerf优势
- 将具有复杂连续场景的表示为5D神经辐射场的方法,参数化为基本的MLP网络;
- 可微的体渲染技术优化标准的RGB图像值,分层抽样策略使得MLP的容量分配给可见场景内容的空间;
- 位置编码升维输入的5D坐标使得nerf可以表征更高频的场景内容。
相关工作
神经3D表示
优化坐标映射到距离函数/占用域的深度网络,但是在真实3D场景表现很弱比如ShapeNet;之后通过可微分的渲染函数放宽了真实3D形状的要求,可以允许只用2D图像来优化;Sitzmann的工作是用不直接的神经3D表示输出特征向量和RGB值在每一个3D坐标,提出了一种由递归神经网络组成的可微分渲染函数,该网络沿着每条射线行进以确定曲面的位置。
尽管这些方法已经可以有效表达复杂场景建模,但是还限制于几何复杂度低的简单形状,导致渲染出来的图像过于平滑。
视角合成和基于图像的渲染
密集视图采样:可以通过简单的采样插值重建逼真的视图
稀疏视图采样:计算机视觉和图像社区已经有重大进展
现有的方法:
- mesh-based 表示方法-局部最小值问题,并且需要固定网格在优化之前,在不受约束的真实场景不可用;
- 体渲染:输入一堆RGB图像,既适合复杂场景又能可微优化。早期是用观察的图像直接可体素网格上色,近期是使用多场景大型数据集训练NN再预测采样的体积表示,再用alpha合成或者沿射线合成渲染新的视图。但是由于离散采样,时间和可见复杂度较差,根本限制了缩放到更高分辨率图像的能力。—文章在全连接的网络参数内编码连续体积来规避该问题(更高质量并且存储成本低)。
方法
整体训练框架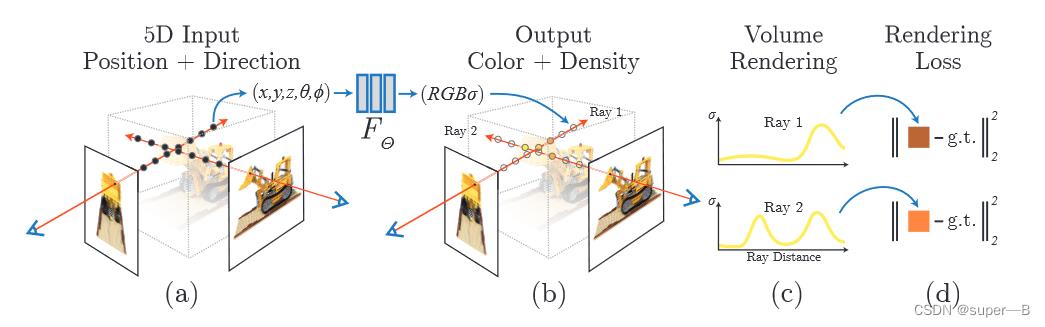
1.沿相机射线采样5D坐标(
x
,
y
,
z
,
θ
,
ϕ
x,y,z,\\theta,\\phi
x,y,z,θ,ϕ),其中视角用三维笛卡尔坐标
d
d
d表示;
2. 将位置信息给MLP生成对应的(
r
,
g
,
b
,
σ
r,g,b,\\sigma
r,g,b,σ);
3. 使用体渲染技术将(
r
,
g
,
b
,
σ
r,g,b,\\sigma
r,g,b,σ)合成图像;
4. 体渲染函数可微,最小化合成图像和真实观测图像的残差来优化。

细节: σ \\sigma σ只用位置信息 x x x预测,( r , g , b r,g,b r,g,b)用位置信息 x x x和 d d d预测—MLP先用8层全连接(使用RELU激活函数、每层256个通道),使得输入 x x x后输出 σ \\sigma σ+一个256维的特征向量 v e c t o r vector vector;该 v e c t o r vector vector再和相机射线方向 d d d作为输入送入另一个全连接层(RELU+128通道),输出视角相关的RGB值。
体渲染技术(用离散形式表示连续积分)
参数说明:
- σ ( x ) \\sigma(x) σ(x)—射线在 x x x处终止的概率即不透明度;
- r ( t ) = o + t d r(t)=o+td r(t)=o+td—射线 r r r的方向;
- C ( r ) C(r) C(r)—射线 r r r在时间起点到时间终点的预测颜色值;
- T ( t ) T(t) T(t)—沿 t n t_n tn到 t t t的射线累计透射率(即射线从 t n t_n tn到 t t t不撞击任何粒子的概率)可以理解为光线射到这“还剩多少光”;
- σ ( t ) \\sigma(t) σ(t)—表示不透明度;
- δ i = t i + 1 − t i \\delta_i=t_i+1-t_i δi=ti+1−ti—是相邻样本的距离;
积分形式:
公式也说明密度只与位置信息有关;颜色与位置信息和观测方向都有关系。
如何沿着射线对空间中的颜色进行积分?
- 一个点的密度越高,射线通过它之后变得越弱,密度和透光度呈反比;
- 一个点的密度越高,这点在这个射线下的颜色反应在像素上的权重越大;
分层抽样:把
[
t
n
,
t
f
]
[t_n,t_f]
[tn,tf]均匀N等分,然后每个小区间随机抽一个样本
t
i
t_i
ti 离散形式:
离散形式:
 注意:原来的积分权重是
T
(
t
)
σ
(
r
(
t
)
)
T(t)\\sigma(r(t))
T(t)σ(r(t)),离散的形式是
T
i
(
1
−
e
x
p
(
−
σ
i
δ
i
)
)
T_i(1-exp(-\\sigma_i\\delta_i))
Ti(1−exp(−σiδi)),而
1
−
e
x
p
(
−
σ
i
δ
i
)
1-exp(-\\sigma_i\\delta_i)
1−exp(−σiδi)是和密度
σ
i
\\sigma_i
σi呈正比的。
注意:原来的积分权重是
T
(
t
)
σ
(
r
(
t
)
)
T(t)\\sigma(r(t))
T(t)σ(r(t)),离散的形式是
T
i
(
1
−
e
x
p
(
−
σ
i
δ
i
)
)
T_i(1-exp(-\\sigma_i\\delta_i))
Ti(1−exp(−σiδi)),而
1
−
e
x
p
(
−
σ
i
δ
i
)
1-exp(-\\sigma_i\\delta_i)
1−exp(−σiδi)是和密度
σ
i
\\sigma_i
σi呈正比的。
优化神经场的技术
位置编码
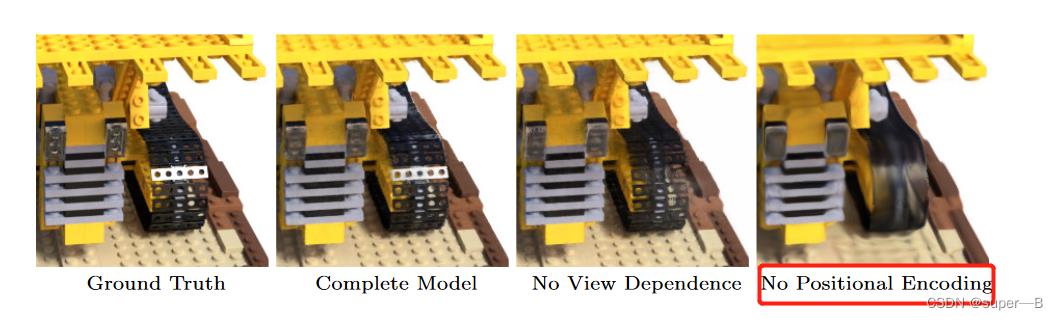
问题:尽管MLP可以无限逼近真实函数,但是在颜色和几何图像的高频变化下依然存在表现很差,如红圈图像部分直接模糊—由Rahaman的工作知深度神经网络倾向于学习低频部分。
解决方案:将输入先用高频函数映射到更高维可见,可以更好拟合包含高频变化的数据。所以把神经网络函数由两个函数组成:
F
Θ
=
F
Θ
′
∘
Υ
F_\\Theta=F_\\Theta^'\\circ\\Upsilon
FΘ=FΘ′∘Υ。
其中
F
Θ
′
F_\\Theta^'
FΘ′是常规的MLP函数,
Υ
\\Upsilon
Υ是一个映射函数-实现高维编码器作用。
 Υ
(
⋅
)
\\Upsilon(\\cdot)
Υ(⋅)作用于每一个分量:
(
x
,
y
,
z
)
(x,y,z)
(x,y,z)和
d
d
d,并且归一化到
[
−
1
,
1
]
[-1,1]
[−1,1],在文章中
L
L
L值对于
Υ
(
x
)
\\Upsilon(x)
Υ(x)取10(相当于原来的3维增加了7维),对于
Υ
(
d
)
\\Upsilon(d)
Υ(d)取4。
Υ
(
⋅
)
\\Upsilon(\\cdot)
Υ(⋅)作用于每一个分量:
(
x
,
y
,
z
)
(x,y,z)
(x,y,z)和
d
d
d,并且归一化到
[
−
1
,
1
]
[-1,1]
[−1,1],在文章中
L
L
L值对于
Υ
(
x
)
\\Upsilon(x)
Υ(x)取10(相当于原来的3维增加了7维),对于
Υ
(
d
)
\\Upsilon(d)
Υ(d)取4。
分层体积抽样
问题:对渲染图像没有贡献的自由空间和遮挡区域仍然被重复采样+空间的密度分布不均匀,如果射线均匀随机采样的话,渲染效率会比较低。并且从上面分析可知道,整个渲染过程就是对射线的采样点颜色进行加权求和,其中权重是
w
i
w_i
wi。
解决方案:用两个网络表示场景:“粗”+“细”
对渲染公式中的颜色权重
w
i
w_i
wi作为对应区间采样的概率,我们训练两个辐射场网络,一个粗糙网络(Coares)一个精细网络(Fine)。粗糙网络是在均匀采样得到比较少(
N
c
N_c
Nc)的点进行渲染并训练的网络,用来对输出
w
i
w_i
wi进行采样概率估计。—重写了离散函数形式如下所示:
 再将结果归一化:
w
^
i
=
w
i
/
∑
j
=
1
N
c
w
j
\\widehatw_i=w_i/\\sum\\limits_j=1^N_cw_j
w
i=wi/j=1∑Ncwj,以
w
^
i
\\widehatw_i
w
i为概率分布采样
N
f
N_f
Nf个点,用
N
c
+
N
f
N_c+N_f
Nc
再将结果归一化:
w
^
i
=
w
i
/
∑
j
=
1
N
c
w
j
\\widehatw_i=w_i/\\sum\\limits_j=1^N_cw_j
w
i=wi/j=1∑Ncwj,以
w
^
i
\\widehatw_i
w
i为概率分布采样
N
f
N_f
Nf个点,用
N
c
+
N
f
N_c+N_f
Nc论文泛读NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis | NeRF: 用于视图合成的神经辐射场的场景表示 | 2020年
出自文献:Mildenhall B, Srinivasan P P, Tancik M, et al. Nerf: Representing scenes as neural radiance fields for view synthesis[C]//European Conference on Computer Vision. Springer, Cham, 2020: 405-421.
摘要
- 我们提出一种方法,使用较少的视图(view)作为输入,对一个连续、隐含的体积场景函数(volumetric scene function)进行优化,从而实现了关于复杂场景的新视图合成的最先进的结果。
- 我们的算法用全连接深度网络来表示场景,其输入是 5D 坐标:空间位置 ( x , y , z ) (x,y,z) (x,y,z) 和视角方向(viewing direction)$ (θ,ϕ)$;其输出是体积密度(volume density)和该空间位置上发射出来的辐射亮度(radiance,与视角相关)。
- 通过沿着相机光线(camera rays)获取 5D 坐标,使用经典的立体渲染(volume rendering)技术,我们将输出的颜色和密度投影到图像上,从而实现视图合成。
- 由于立体渲染是可导的,神经网络的优化,只需要提供一系列确定相机位姿的图像。
1 介绍
-
我们的工作,用新的方法解决了在
视图合成(view synthesis)
中长期以来的问题。
- 我们直接优化一个连续的 5D 场景表示(scene representation)的参数(网络权重),根据捕获到图像,最小化渲染误差。
- 我们把静态场景表示为连续的 5D 函数(指输入是 5D ),输出在各个空间点 ( x , y , z ) (x,y,z) (x,y,z) 和各个方向 ( θ , ϕ ) (θ,ϕ) (θ,ϕ) 发射出来的辐射亮度和密度(就像可导的透明度,控制穿过 ( x , y , z ) (x,y,z) (x,y,z) 的射线,可以累加多少辐射亮度)。
- 我们的方法是优化一个深度全连接的神经网络,没有用到卷积层,全连接神经网络又称多层感知器(MLP);我们用这个 MLP 来表示这样的函数:根据一个 5D 坐标 ( x , y , z , θ , ϕ ) (x,y,z,θ,ϕ) (x,y,z,θ,ϕ),回归输出一个体积密度和视角相关的 RGB 颜色。
-
整个流水线如下图所示:

- 为了根据某一视角(viewpoint),渲染出这个神经辐射场(Neural Radiance Field, NeRF),我们:
-
- 使相机光线穿过场景,生成一组 3D 采样点;
- 让这些 3D 点和对应的 3D 视角方向作为神经网络的输入,生成一组颜色和密度;
- 使用经典的立体渲染技术,累加这些颜色和密度,得到 2D 图像。
- 由于以上过程是可导的,我们可以使用梯度下降来优化模型,最小化
观测图像与模型回归计算的图像之间的误差。- 这可以鼓励神经网络学习的场景模型具有一致性(coherent),即在包含场景内容的位置,可以得到较大的体积密度,和准确的颜色。
- 我们发现对于复杂的场景,用简单的方法优化 NeRF 效果不理想:
- 很难得到高分辨率的收敛结果;
- 也不能高效利用相机光线所需的采样点。
- 于是,我们这样解决以上问题:
- 用一个位置编码(positional encoding)对输入 5D 坐标进行变换,使得 MLP 可以表示高频函数;
- 提出层次化的采样流程(hierarchical sampling procedure),减少所需的采样点。
- 我们的方法保留了体积表示的优点:
- 可以表示复杂的几何和外观;
- 可以通过投影图像进行梯度下降的优化。
- 重要的是,我们的方法克服了体积表示的一个关键问题:在表示高分辨率的复杂场景时,离散的体素网格的存储空间成本非常高。
- 总结下来,本文的贡献如下:
- 包含复杂几何和材质的连续场景的表示方法:使用参数化为 MLP 的 5D 神经辐射场;
- 基于立体渲染技术的可导的渲染流程,用于网络的优化。其中还包括层次化的采样策略,专注于可见的场景内容(visible scene content),充分利用了 MLP 的容量。
- 使用位置编码,将输入 5D 坐标映射到更高维的空间,让 NeRF 可以学习表示高频的场景内容。
2 相关工作
3 神经辐射场的场景表示
我们把一个连续的场景表示为一个 5D 向量值函数(vector-valued function):
- 输入是 3D 位置 x = ( x , y , z ) x=(x,y,z) x=(x,y,z) 和 2D 视角方向 ( θ , ϕ ) (θ,ϕ) (θ,ϕ)
- 输出是发射颜色 c = ( r , g , b ) c=(r,g,b) c=(r,g,b) 和体积密度 σ σ σ。
在实际中,我们把视角方向表示为 3D 笛卡尔单位向量
d
d
d。我们用一个 MLP 网络来近似这个连续的 5D 场景表示:
F
Θ
:
(
x
,
d
)
→
(
c
,
σ
)
F_\\Theta:(\\mathbfx, \\mathbfd) \\rightarrow(\\mathbfc, \\sigma)
FΘ:(x,d)→(c,σ)
我们优化该网络的权重,使之对于每个输入 5D 坐标,都会得到对应的密度和有方向的发射颜色。
我们约束了预测体积密度 σ 的网络的输入仅仅是位置 X,而预测 RGB 颜色 C 的网络的输入是位置和视角方向,通过这种方式可以鼓励网络学习到多视角连续的表示。
- 在具体实现上,MLP F Θ F_\\Theta FΘ 首先用 8 层的全连接层(使用 ReLU 激活函数,每层有 256 个通道),处理 3D 坐标 x x x,得到 σ σ σ 和一个 256 维的特征向量。
- 这个 256 维的特征向量,与视角方向一起拼接起来,喂给另一个全连接层(使用 ReLU 激活函数,每层有 128 个通道),输出方向相关的 RGB 颜色。
图 3 可以观察到,我们的方法可以表示出非朗伯体效应(non-Lambertian effects)。从图 4 可以观察到,如果训练模型时没有视角的依赖(只有 X 一个输入),那么模型会很难表示出高光(specularity)。


4 辐射场的立体渲染
我们的 5D 神经辐射场把场景表示为:任意空间点上的体积密度和有方向的辐射亮度。使用经典的立体渲染的原理,我们可以渲染出任意射线穿过场景的颜色。体积密度
σ
(
x
)
σ(x)
σ(x) 可以解释为:光线停留在位置 X� 处的无穷小粒子的可导概率。在最近和最远边界为
t
n
t_n
tn 和
t
f
t_f
tf 的条件下,相机光线
r
(
t
)
=
o
+
t
d
r(t)=o+td
r(t)=o+td 的颜色
C
(
r
)
C(r)
C(r)为:
C
(
r
)
=
∫
t
n
t
f
T
(
t
)
σ
(
r
(
t
)
)
c
(
r
(
t
)
,
d
)
d
t
,
where
T
(
t
)
=
exp
(
−
∫
t
n
t
σ
(
r
(
s
)
)
d
s
)
\\beginequation C(\\mathbfr)=\\int_t_n^t_f T(t) \\sigma(\\mathbfr(t)) \\mathbfc(\\mathbfr(t), \\mathbfd) d t, \\text where T(t)=\\exp \\left(-\\int_t_n^t \\sigma(\\mathbfr(s)) d s\\right) \\endequation
C(r)=∫tntfT(t)σ(r(t))c(r(t),d)dt, where T(t)=exp(−∫tntσ(r(s))ds)
函数 $T(t) $表示沿着光线从 t n t_n tn 到 t t t 所累积的透明度(accumulated transmittance) ,即 光线从 t n t_n tn 出发到 t t t,穿过该路径的概率。视图的渲染需要求这个积分 C ( r ) C(r) C(r),它是就是虚拟相机穿过每个像素的相机光线,所得到的颜色。
我们使用求积法(quadrature)进行积分的数值求解。确定性的求积分不太适合 MLP,我们采用的是**分层抽样(stratified sampling)**的方法。我们把
[
t
n
,
t
f
]
[t_n,t_f]
[tn,tf]分成均匀分布的小区段,接着对每个小区段进行均匀采样:
t
i
∼
U
[
t
n
+
i
−
1
N
(
t
f
−
t
n
)
,
t
n
+
i
N
(
t
f
−
t
n
)
]
\\beginequation t_i \\sim \\mathcalU\\left[t_n+\\fraci-1N\\left(t_f-t_n\\right), t_n+\\fraciN\\left(t_f-t_n\\right)\\right] \\endequation
ti∼U[tn+Ni−1(tf−tn),tn+Ni(tf−tn)]
我们使用采样的样本,用积分法则来计算
C
(
r
)
C(r)
C(r):
C
^
(
r
)
=
∑
i
=
1
N
T
i
(
1
−
exp
(
−
σ
i
δ
i
)
)
c
i
,
where
T
i
=
exp
(
−
∑
j
=
1
i
−
1
σ
j
δ
j
)
\\beginequation \\hatC(\\mathbfr)=\\sum_i=1^N T_i\\left(1-\\exp \\left(-\\sigma_i \\delta_i\\right)\\right) \\mathbfc_i, \\text where T_i=\\exp \\left(-\\sum_j=1^i-1 \\sigma_j \\delta_j\\right) \\endequation
C^(r)=i=1∑NTi(1−exp(−σiδi))ci, where Ti=论文阅读:NeRF Representing Scenes as Neural Radiance Fields for View Synthesis
论文笔记:NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis
论文阅读《Block-NeRF: Scalable Large Scene Neural View Synthesis》