[ROS常用组件] --- rqt工具箱
Posted Overboom
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[ROS常用组件] --- rqt工具箱相关的知识,希望对你有一定的参考价值。
1 认识rqt
概念:
ROS基于 QT 框架,针对机器人开发提供了一系列可视化的工具,这些工具的集合就是rqt
作用:
可以方便的实现 ROS 可视化调试,并且在同一窗口中打开多个部件,提高开发效率,优化用户体验。
组成:
rqt 工具箱组成有三大部分
rqt——核心实现,开发人员无需关注
rqt_common_plugins——rqt 中常用的工具套件
rqt_robot_plugins——运行中和机器人交互的插件(比如: rviz)
2 rqt常用插件:rqt_graph
简介:可视化显示计算图
启动:可以在 rqt 的 plugins 中添加,或者使用rqt_graph启动

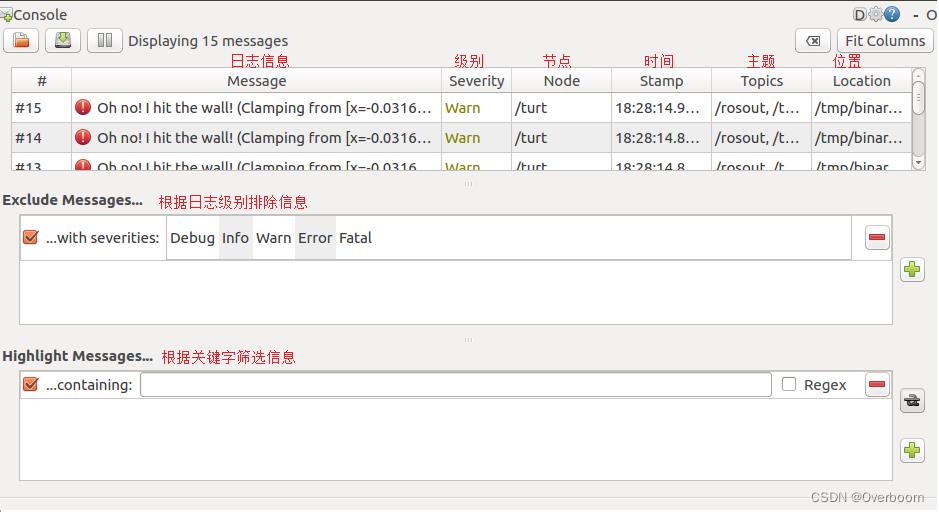
3 rqt常用插件:rqt_console
简介:rqt_console 是 ROS 中用于显示和过滤日志的图形化插件
准备:编写 Node 节点输出各个级别的日志信息
/*
ROS 节点:输出各种级别的日志信息
*/
#include "ros/ros.h"
int main(int argc, char *argv[])
ros::init(argc,argv,"log_demo");
ros::NodeHandle nh;
ros::Rate r(0.3);
while (ros::ok())
ROS_DEBUG("Debug message d");
ROS_INFO("Info message oooooooooooooo");
ROS_WARN("Warn message wwwww");
ROS_ERROR("Erroe message EEEEEEEEEEEEEEEEEEEE");
ROS_FATAL("Fatal message FFFFFFFFFFFFFFFFFFFFFFFFFFFFF");
r.sleep();
return 0;
4 rqt常用插件:rqt_plot
简介:图形绘制插件,可以以 2D 绘图的方式绘制发布在 topic 上的数据
准备:启动 turtlesim 乌龟节点与键盘控制节点,通过 rqt_plot 获取乌龟位姿
启动:可以在 rqt 的 plugins 中添加,或者使用rqt_plot启动

5 rqt常用插件:rqt_bag
简介:录制和重放 bag 文件的图形化插件
准备:启动 turtlesim 乌龟节点与键盘控制节点
启动:可以在 rqt 的 plugins 中添加,或者使用rqt_bag启动
录制:

重放:

以上是关于[ROS常用组件] --- rqt工具箱的主要内容,如果未能解决你的问题,请参考以下文章