roscpp功能包
Posted loongembedded
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了roscpp功能包相关的知识,希望对你有一定的参考价值。
文章目录
1.概述
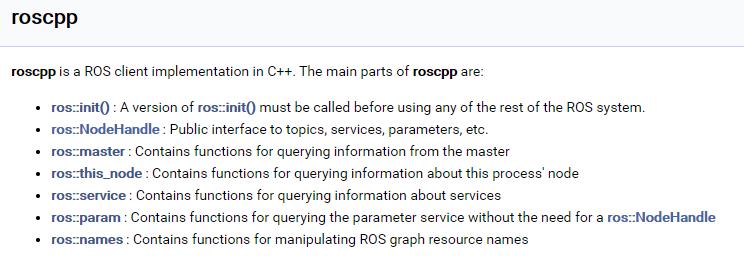
ROS提供了不同语言的编程接口,C++接口为roscpp,Python接口为rospy,Java接口为rosjava。这些接口都可以用来创建topic、service、param,实现通信功能,把一些常用的基本功能做了封装。
roscpp位于/opt/ros/noetic下,用C+ +实现ROS通信。C++代码通过catkin编译构建,roscpp可以理解为一个C++库,创建一个CMake工程,在其中include roscpp等ROS的libraries,在工程中即可使用ROS提供的函数。
#include "ros/ros.h" //调用C++客户端接口
以上是关于roscpp功能包的主要内容,如果未能解决你的问题,请参考以下文章