somebot机械臂智能坦克车应该这样玩儿!
Posted somebot
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了somebot机械臂智能坦克车应该这样玩儿!相关的知识,希望对你有一定的参考价值。

在前一篇文章中,我们详细介绍了somebot机械臂的安装步骤,底座、左臂、右臂、底板、支持板、爪子以及最后的整体组装,那么现在我们要搞一个进阶玩法,把机械臂安装到一个智能坦克车上,履带式坦克车拥有超强的越野能力,双侧双电机驱动又使其具有灵活的机动性,两者叠加之后俨然就是一架军警排爆车啊!

再来看看我们的靓照:
那么这么靓的车,要怎么从一堆零件变换成整车呢?且听我慢慢道来。
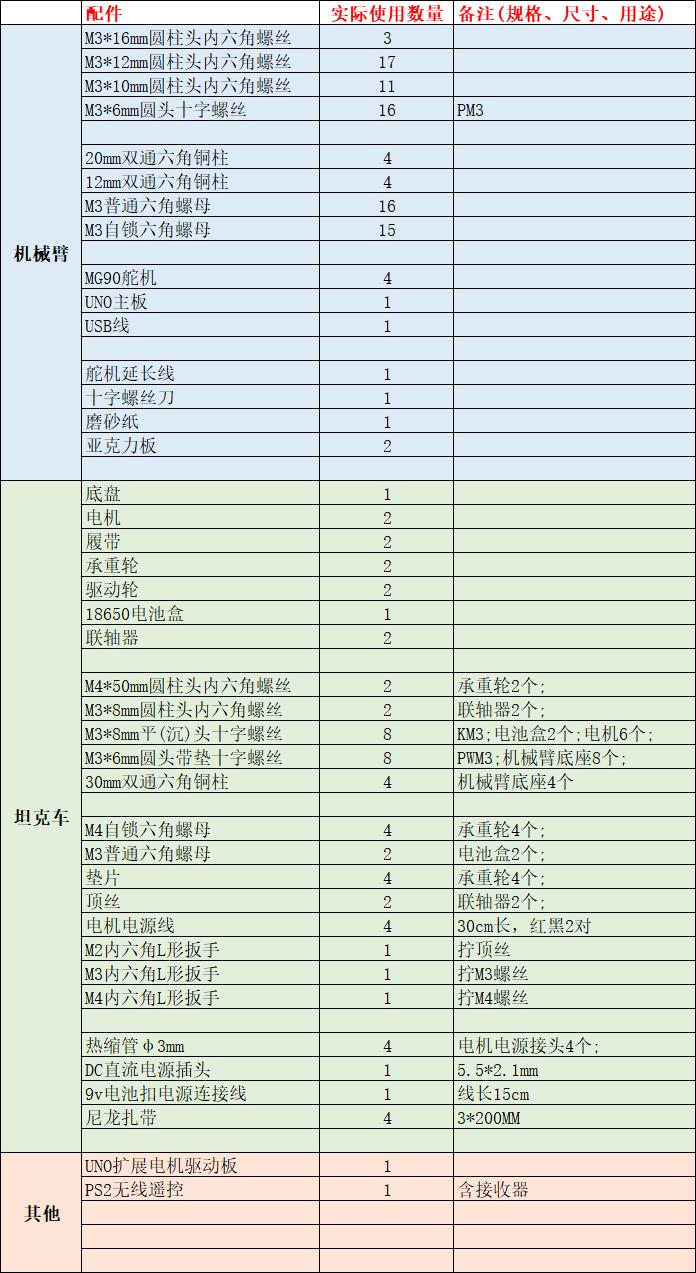
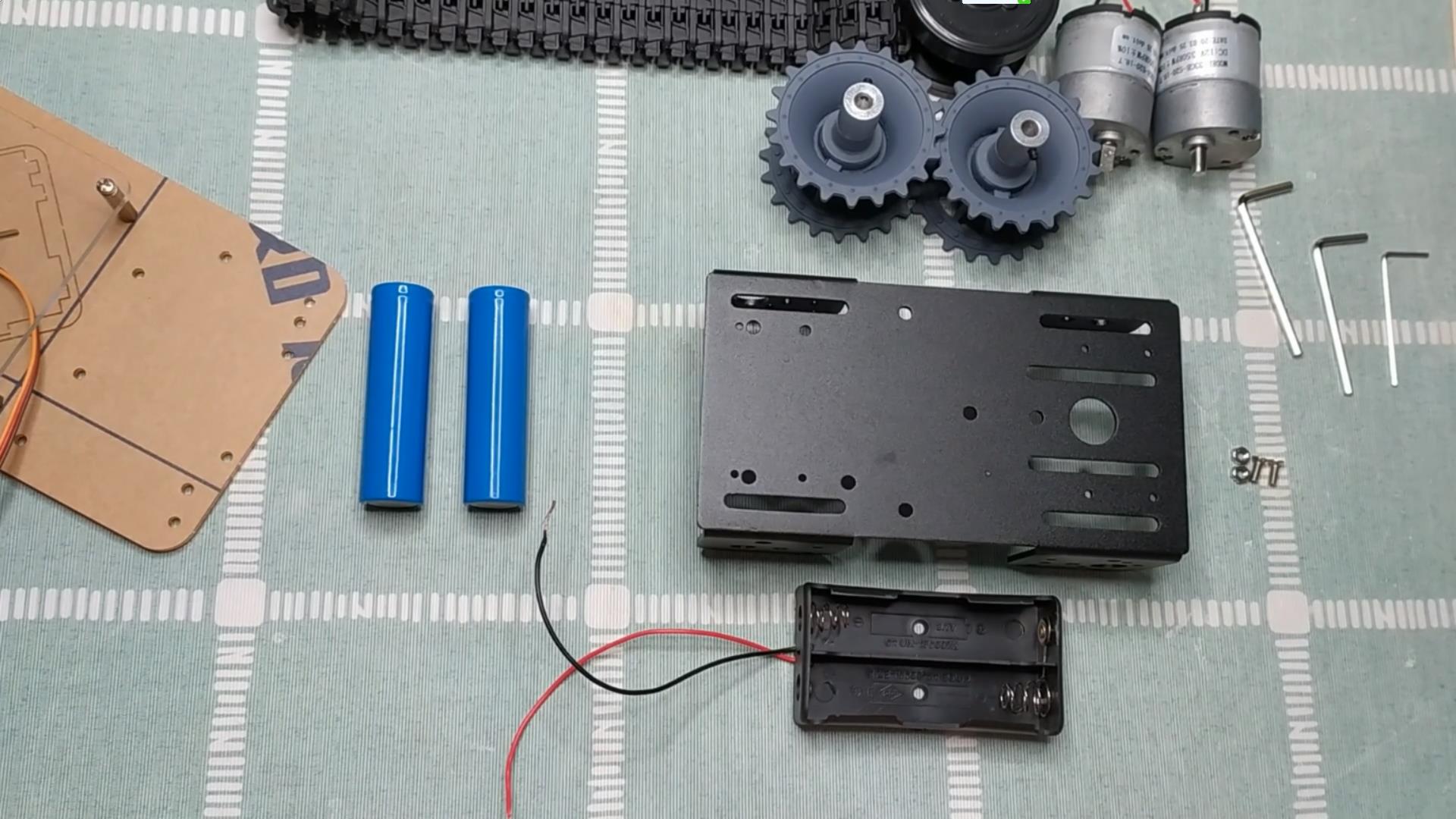
一、坦克车零件介绍
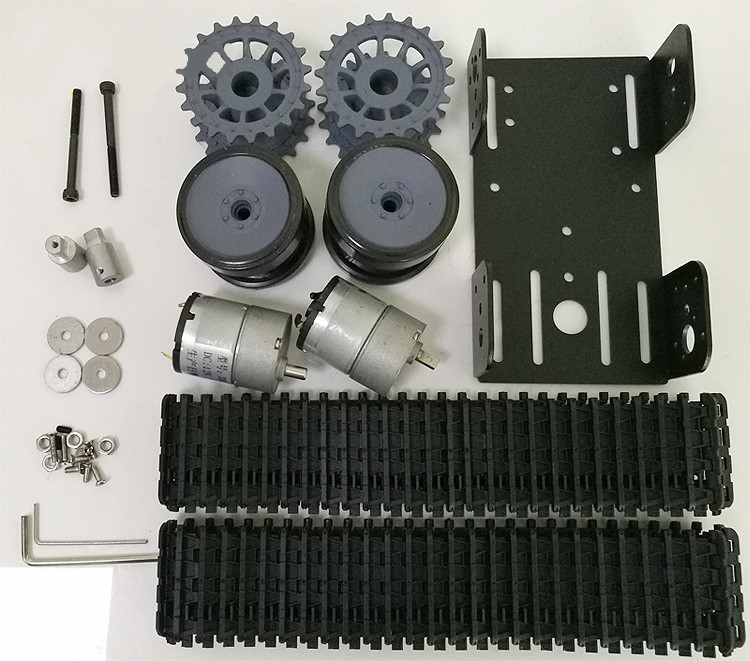
机械臂的零件,这里就不再重复展示了,本文主要讲坦克车。
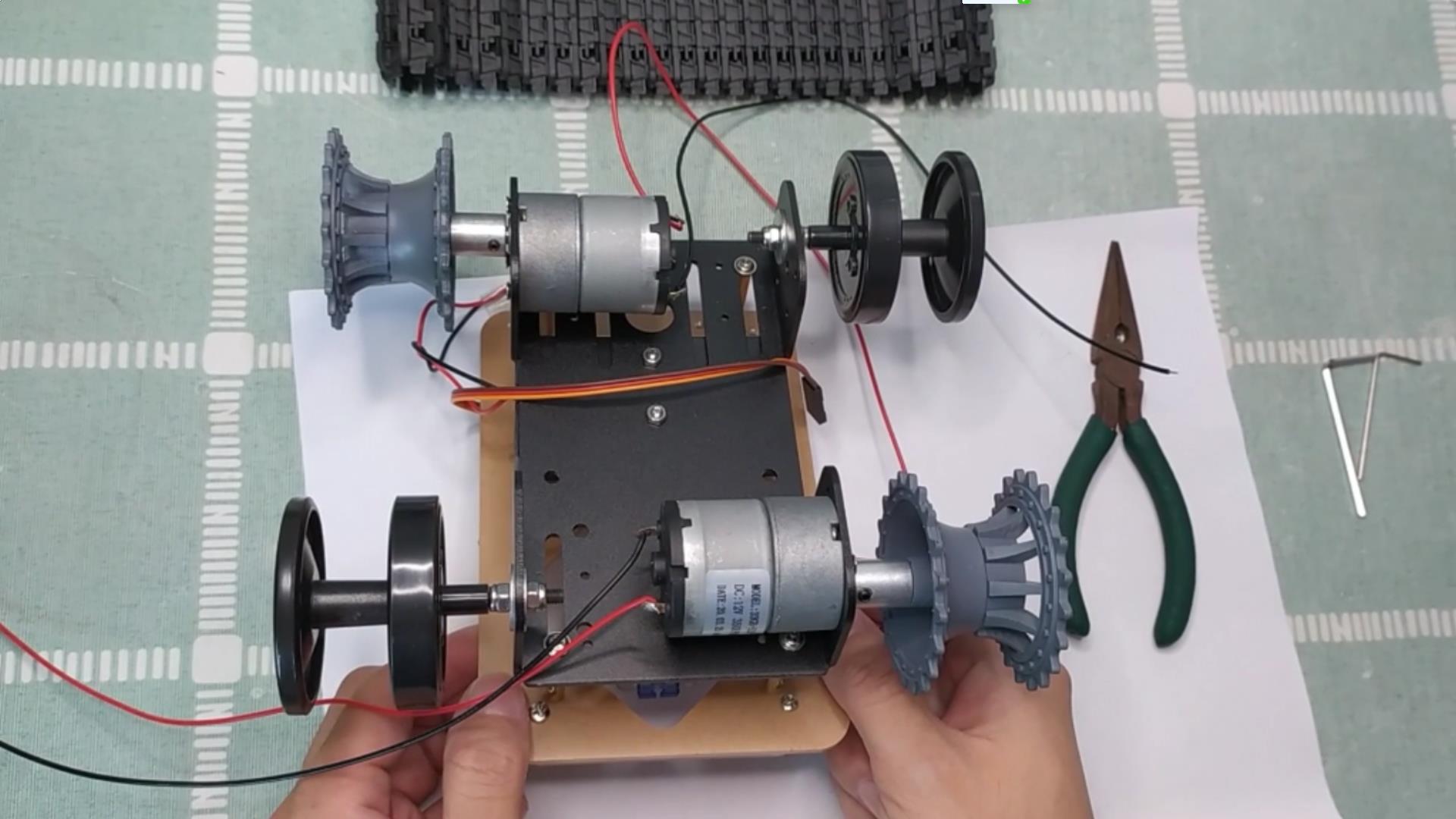
二、坦克车电机接线
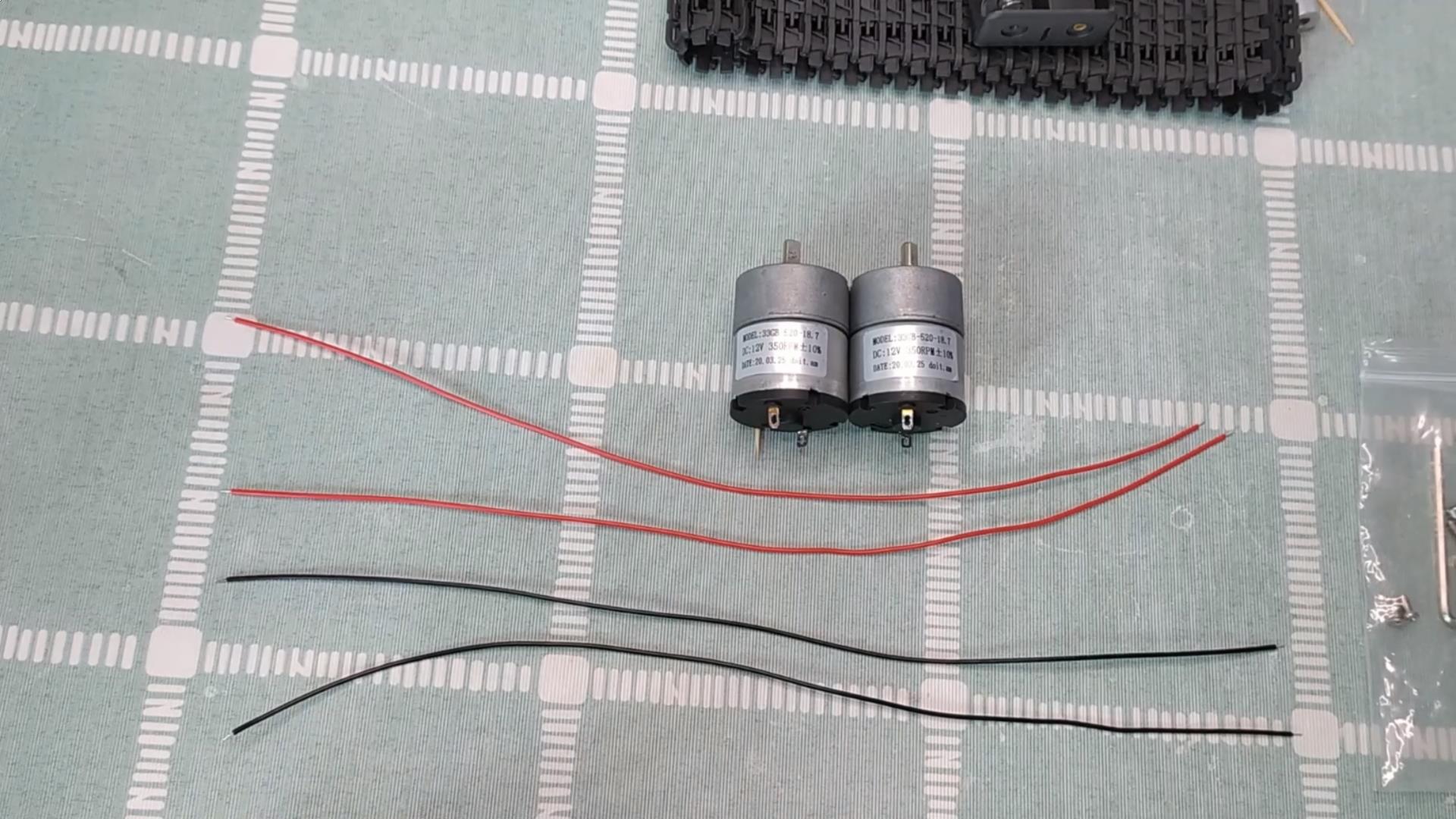
33GB-520 减速电机参数
电压范围:6V-12V
额定电压:DC12V
空载速度:170-350RPM
空载电流:100mA
重量:100g
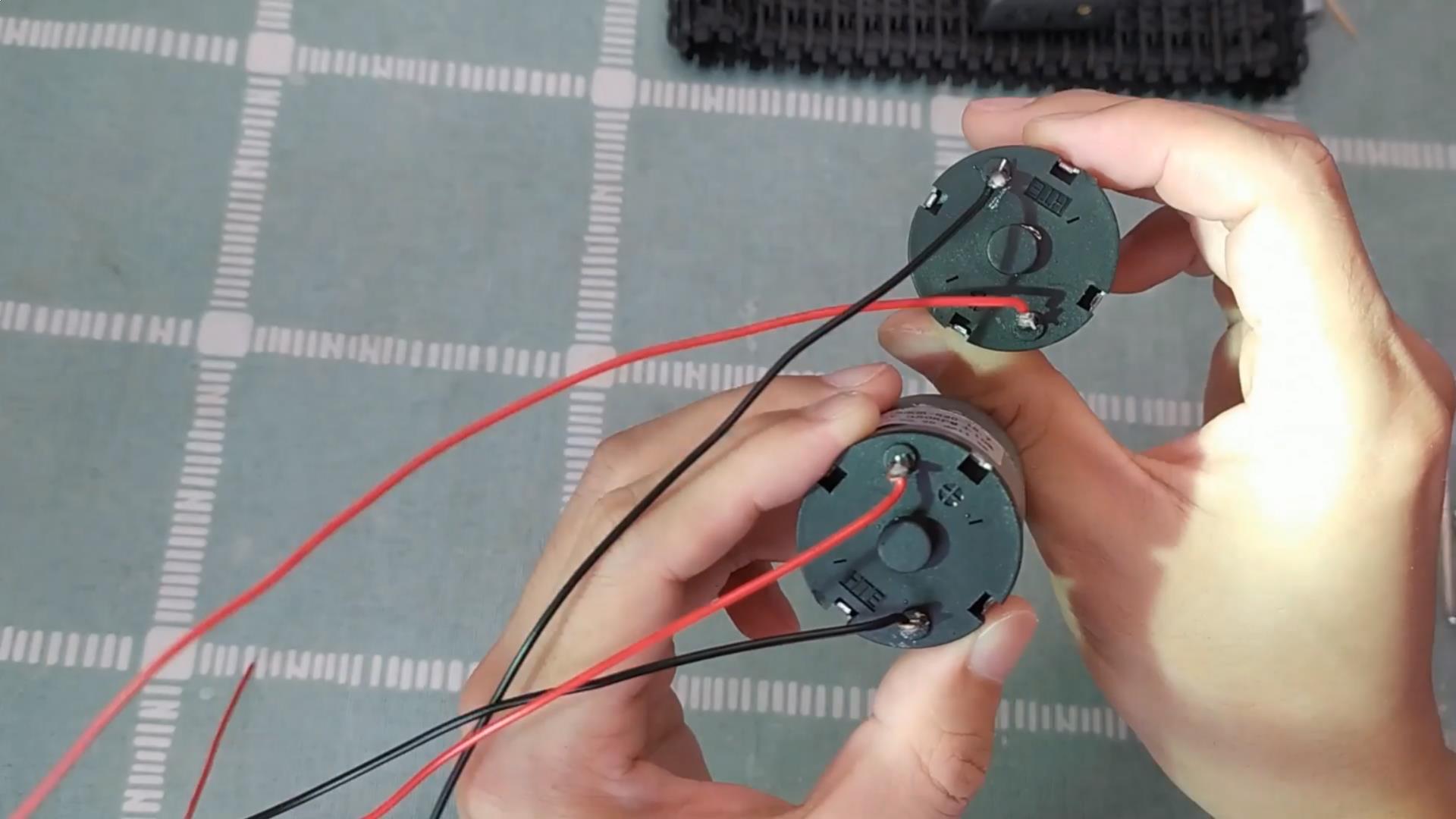
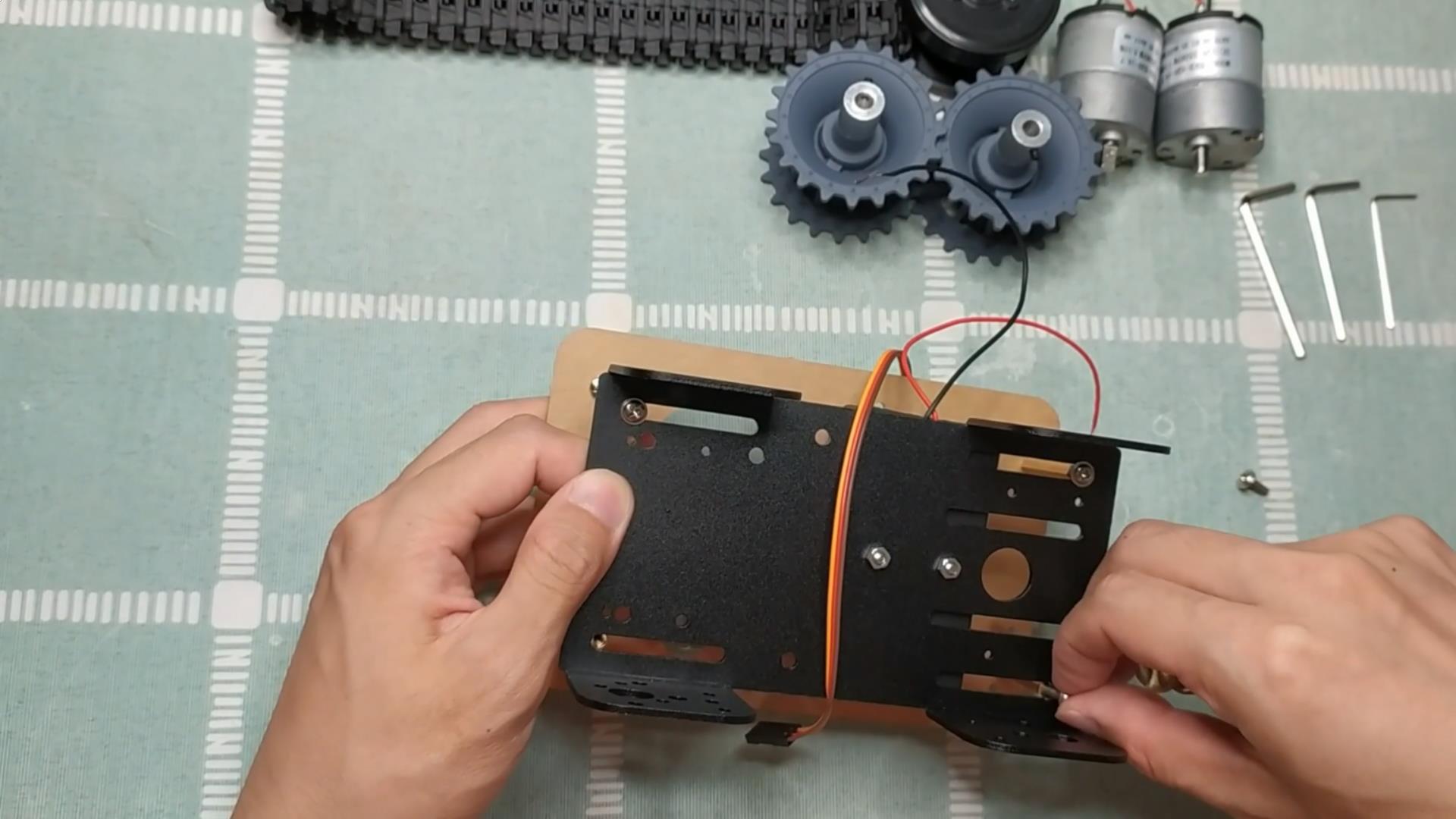
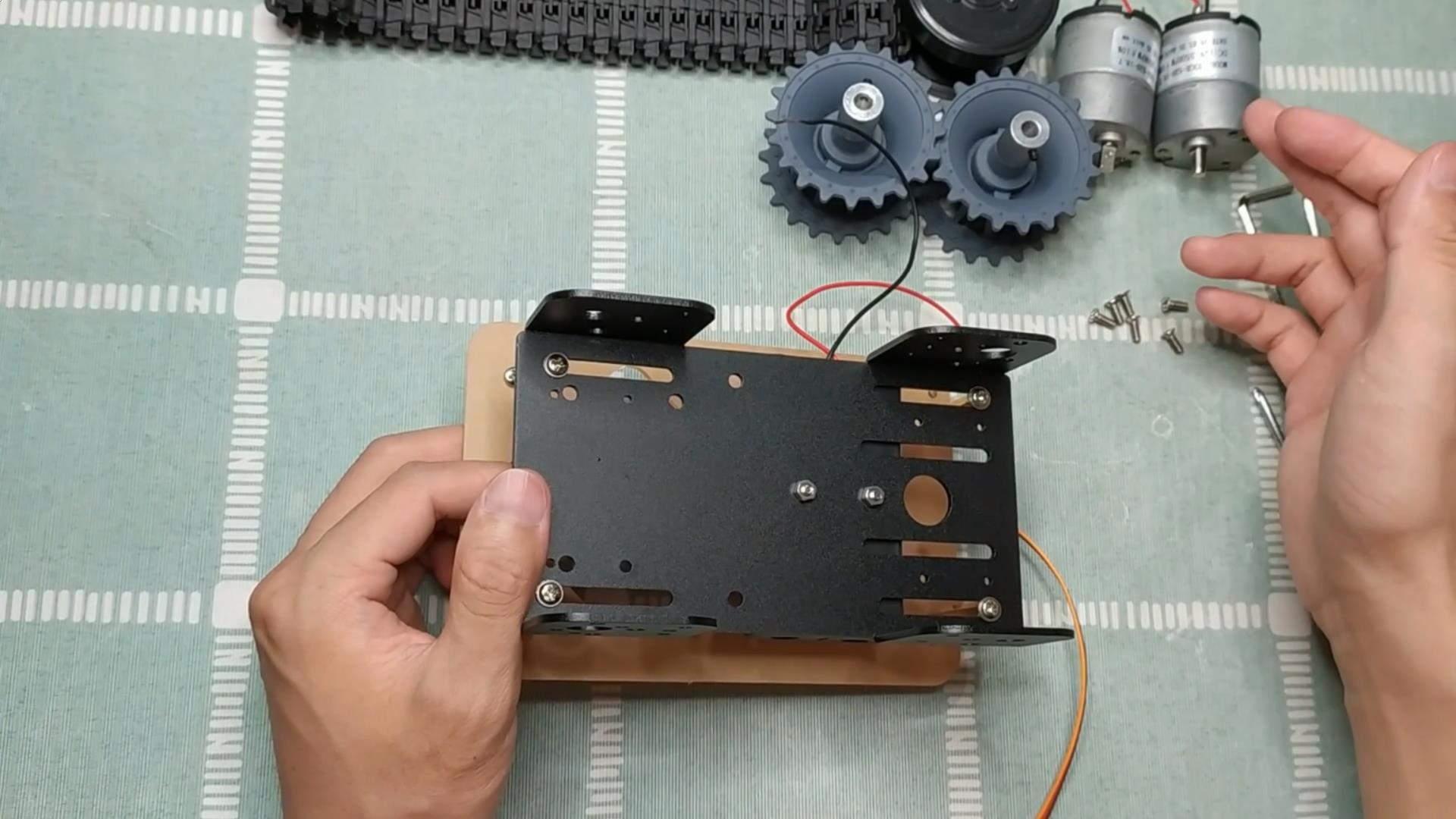
2个减速电机各配备了一对红黑电源线,方便识别。同时接线时也要注意下,电源线的焊接位置,建议红色线统一焊接在靠近“+”号的电源铜片上,如下图所示:
三、驱动轮预安装

要注意驱动轮的顶丝,它将会被用来固定驱动轮和电机转轴。

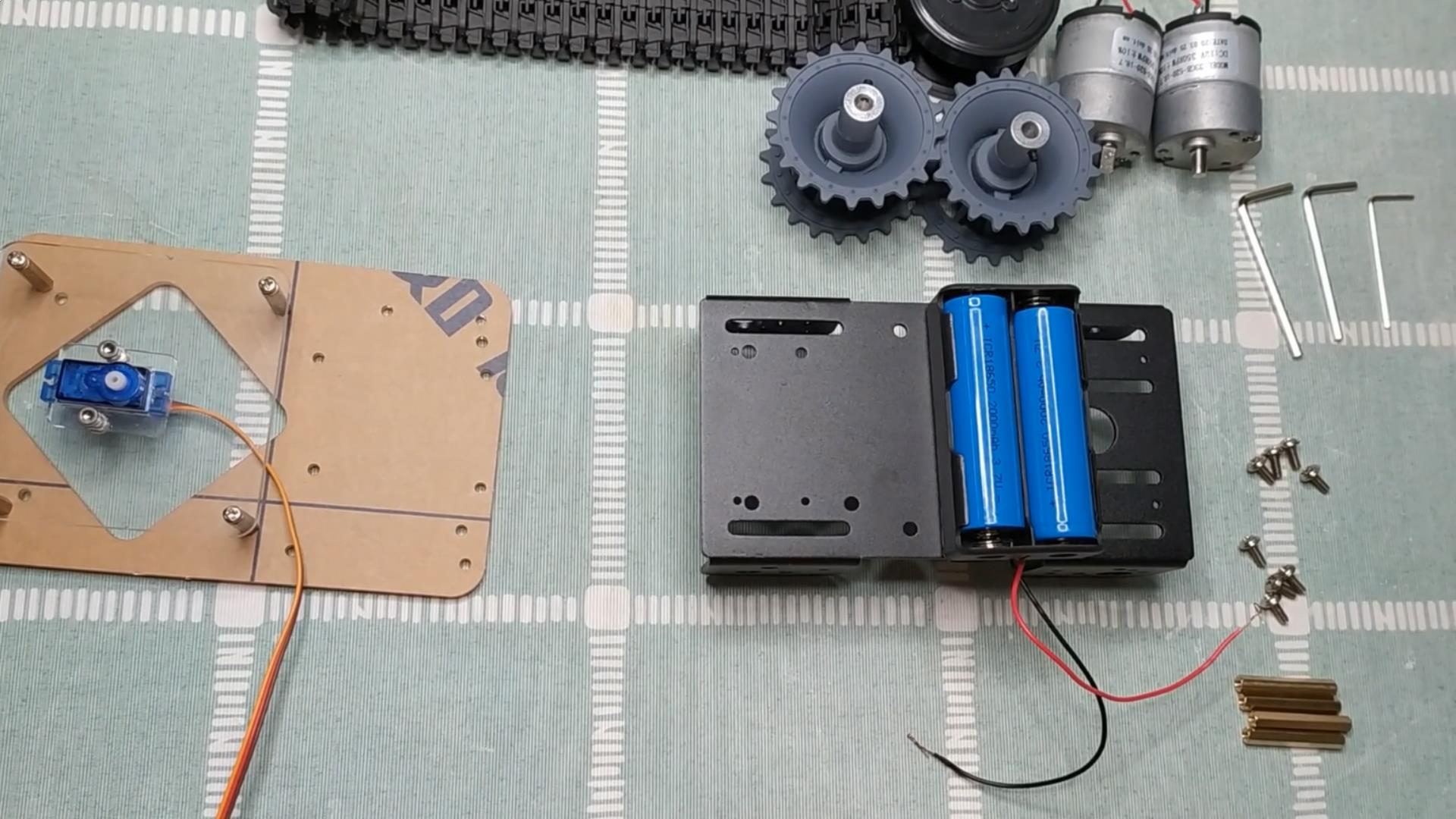
四、安装电池盒
我们这里提供的是18650电池安装盒,需要自备18650电池。坦克车的底盘上有2个螺丝孔,是专门用来安装这个电池盒的,注意使用M3*8mm平(沉)头十字螺丝。
安装完电池盒之后,装上了18650电池,我们需要给电池盒电源线加以保护,比如套上胶带对正负极进行隔离,防止电池短路。
五、安装机械臂底座
这一步比较简单,只需要用铜柱和M3*6mm圆头带垫十字螺丝,将坦克车底盘和机械臂底座固定在一起即可。
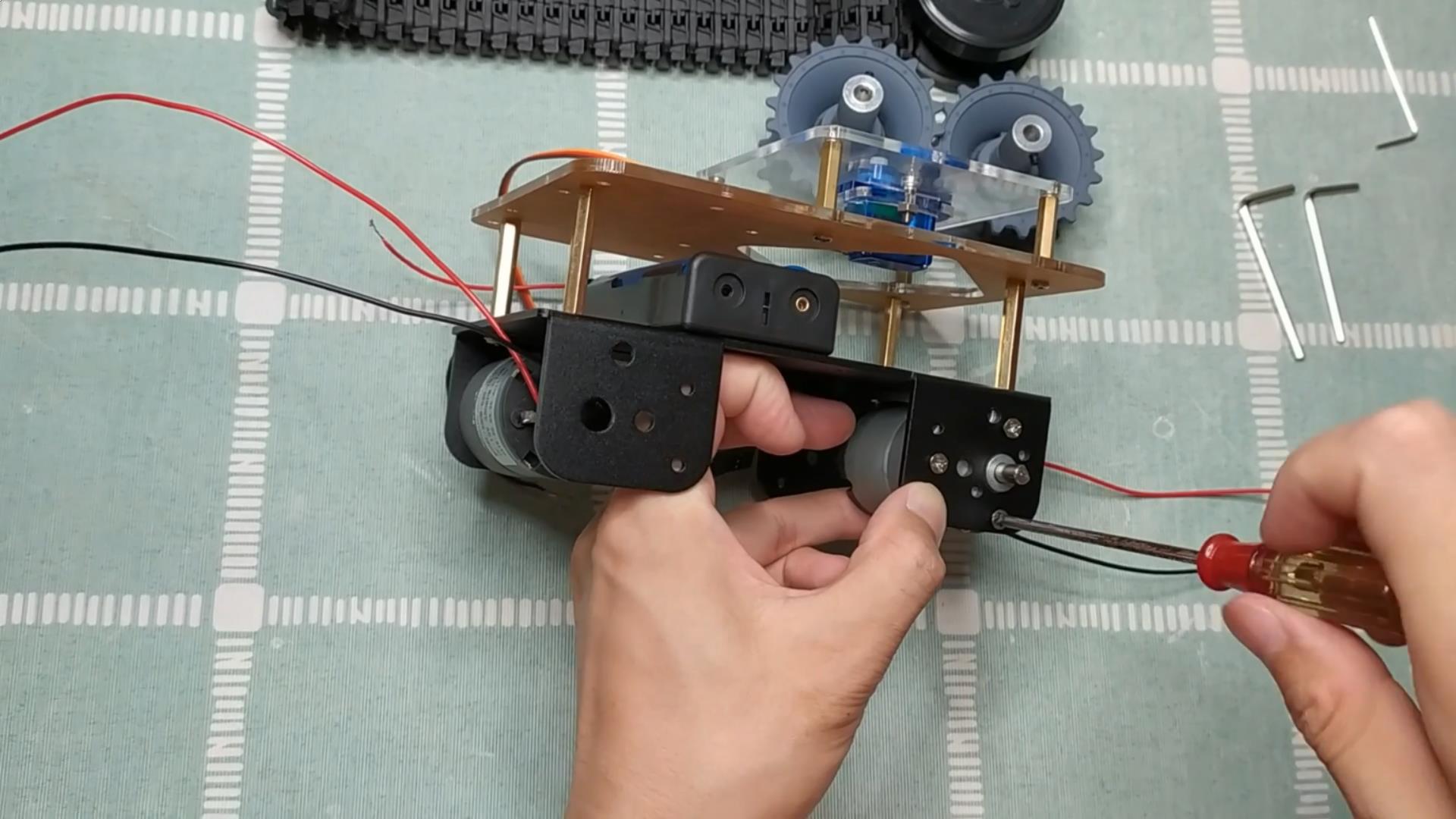
六、安装电机
电机,主要是靠下面这3个构成等腰三角形的螺丝孔,使用M3*8mm平(沉)头十字螺丝,进行固定。
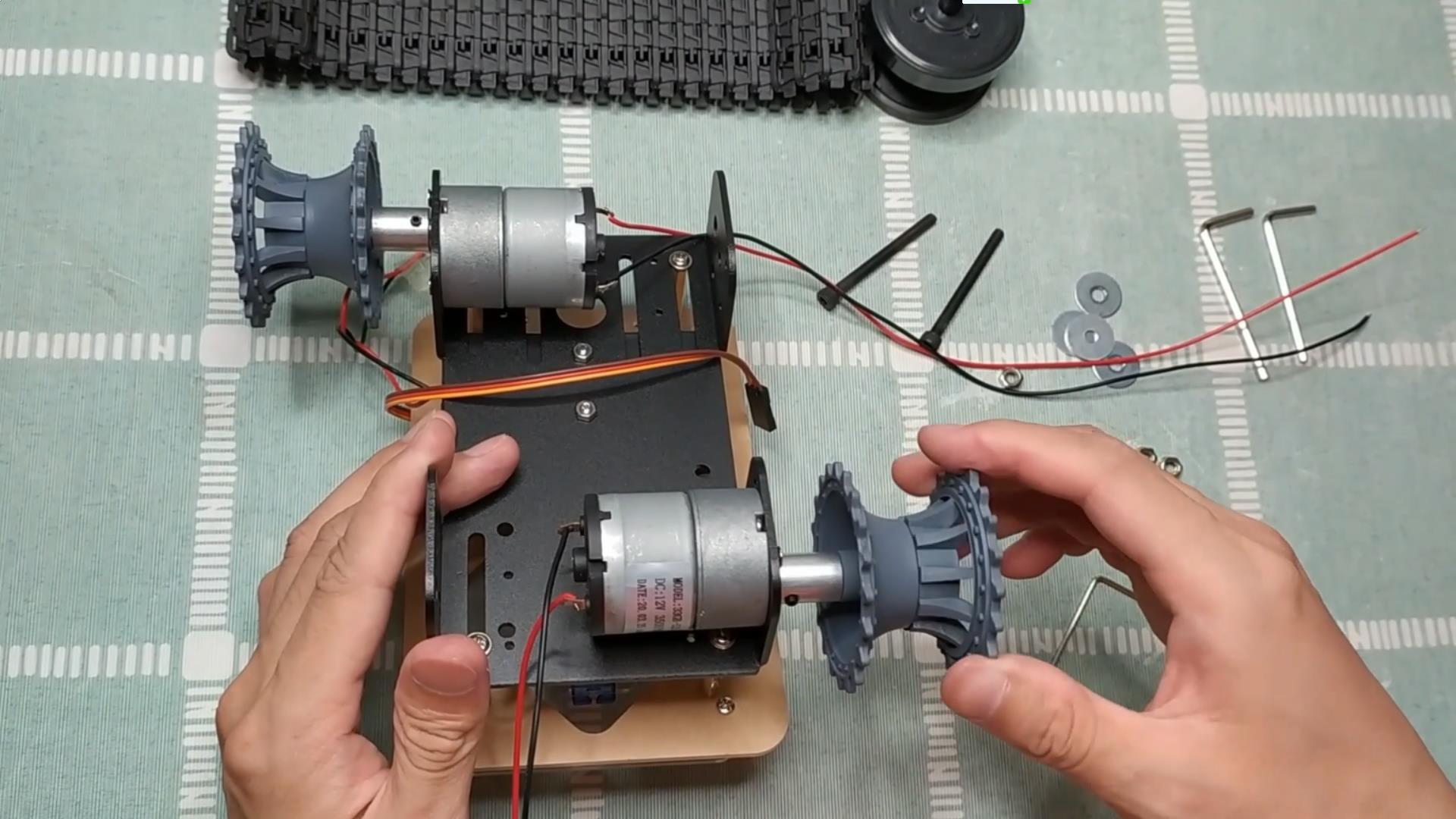
七、安装驱动轮
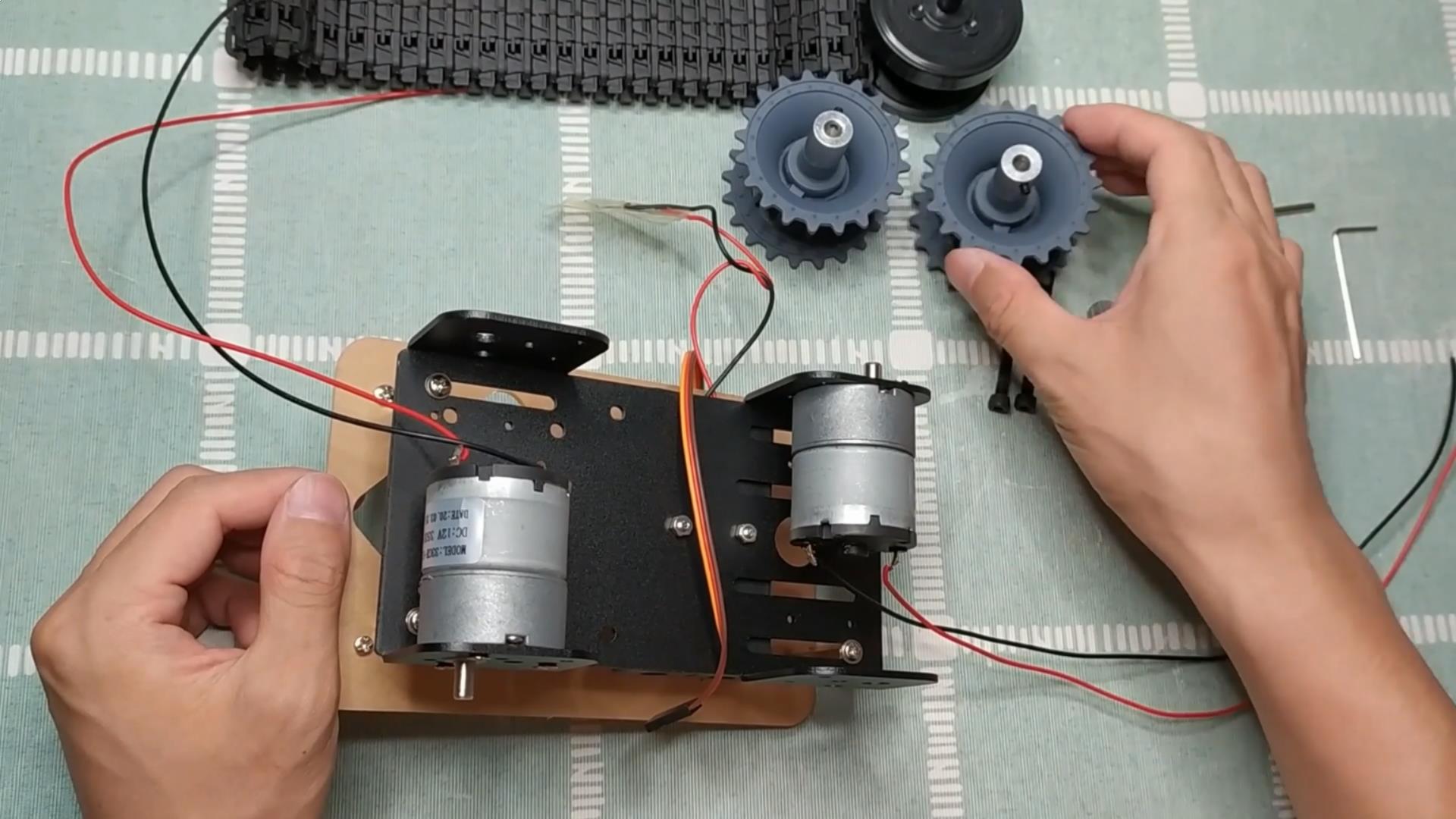
用顶丝,把驱动轮和电机的转轴,固定在一块儿。
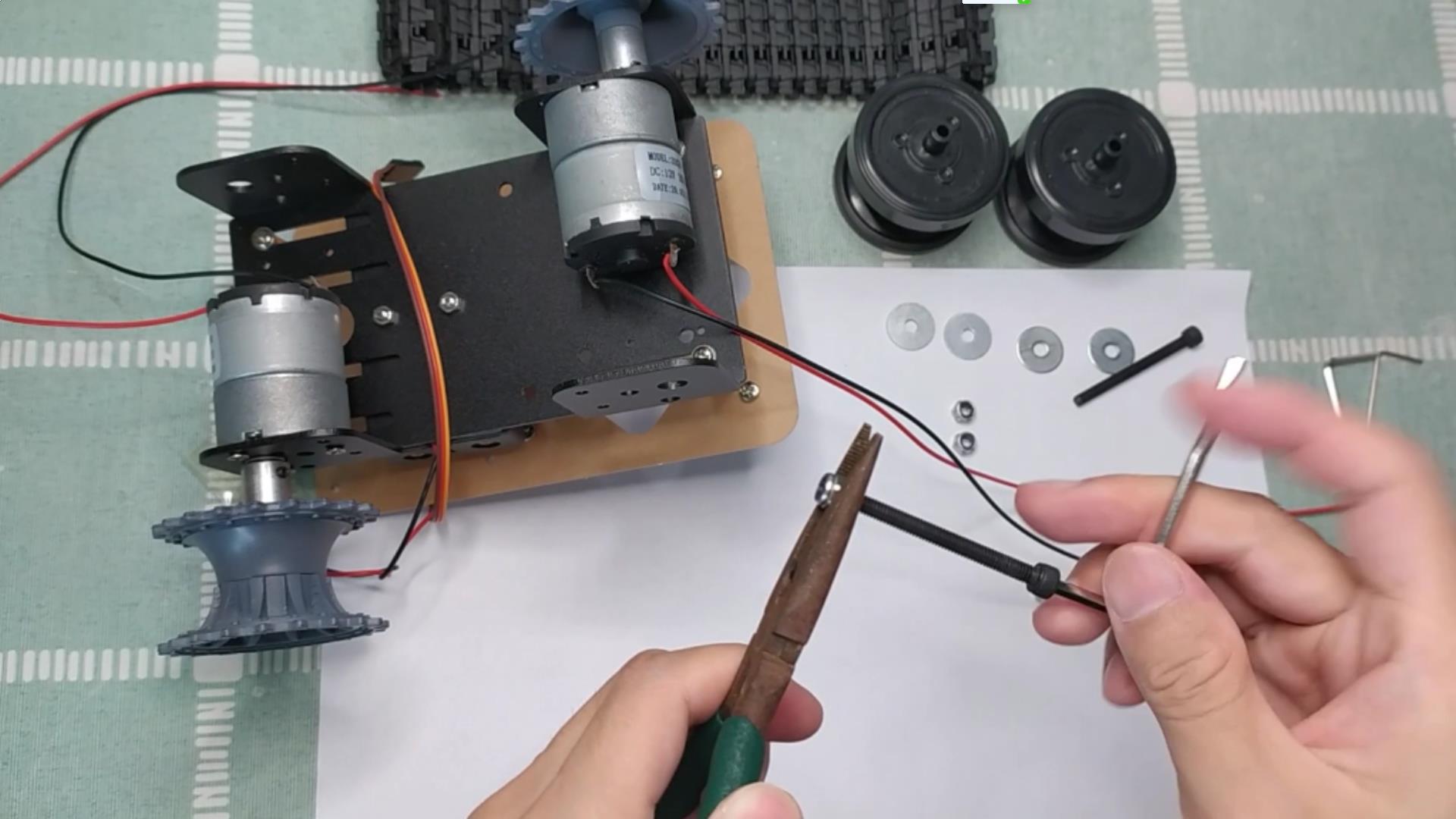
八、安装承重轮
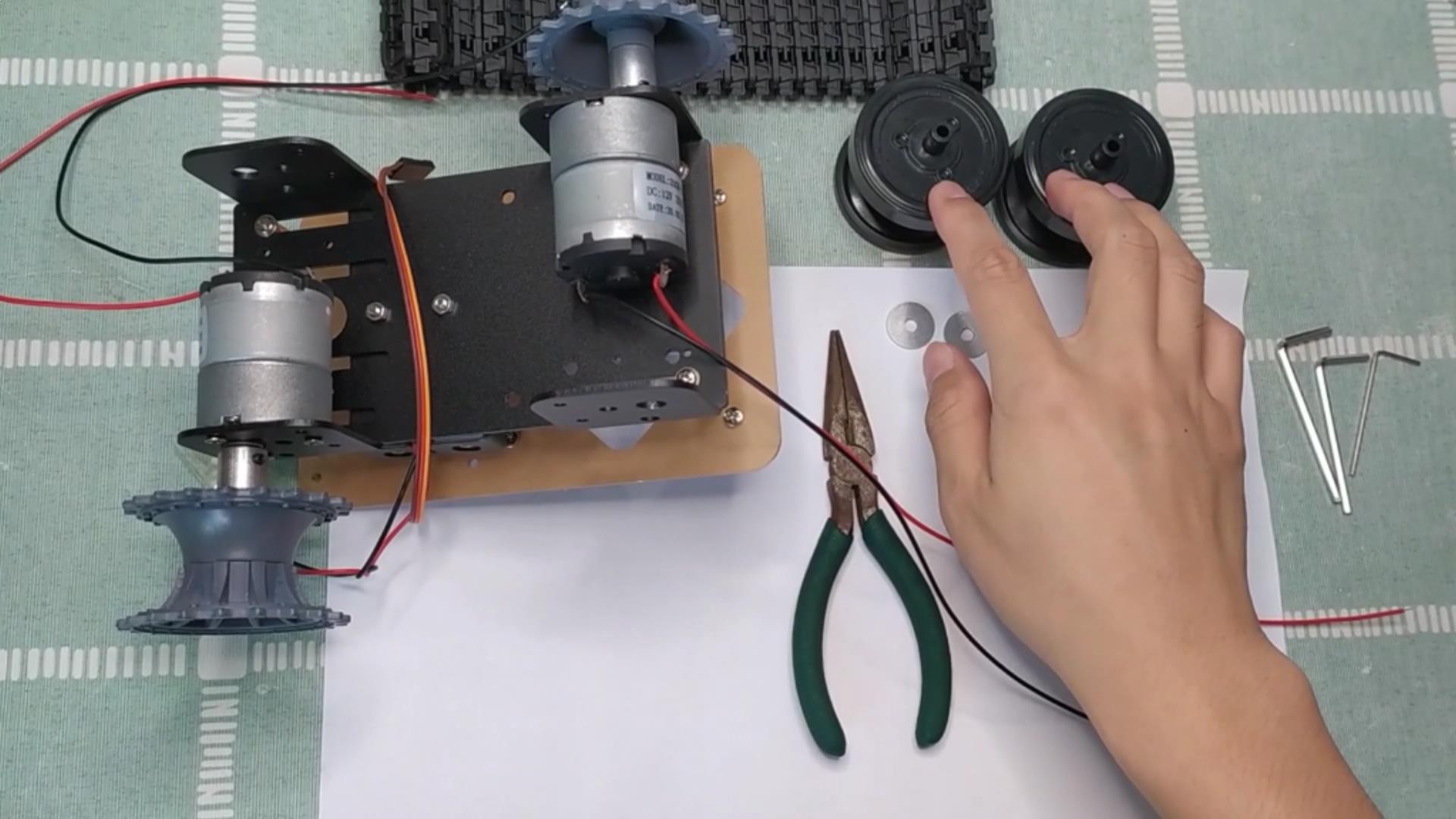
首先,需要给M4*50mm圆柱头内六角螺丝和M4自锁六角螺母做一个磨合的操作,这是为了下一步自锁螺母更容易拧入螺丝。
接着把承重轮固定到坦克车的底盘上,此时要特别注意承重轮和驱动轮的侧面要平行,否则会损耗电机的驱动力。
并且2个M4自锁六角螺母的拧入方向,必须如下图中的放大图所示:
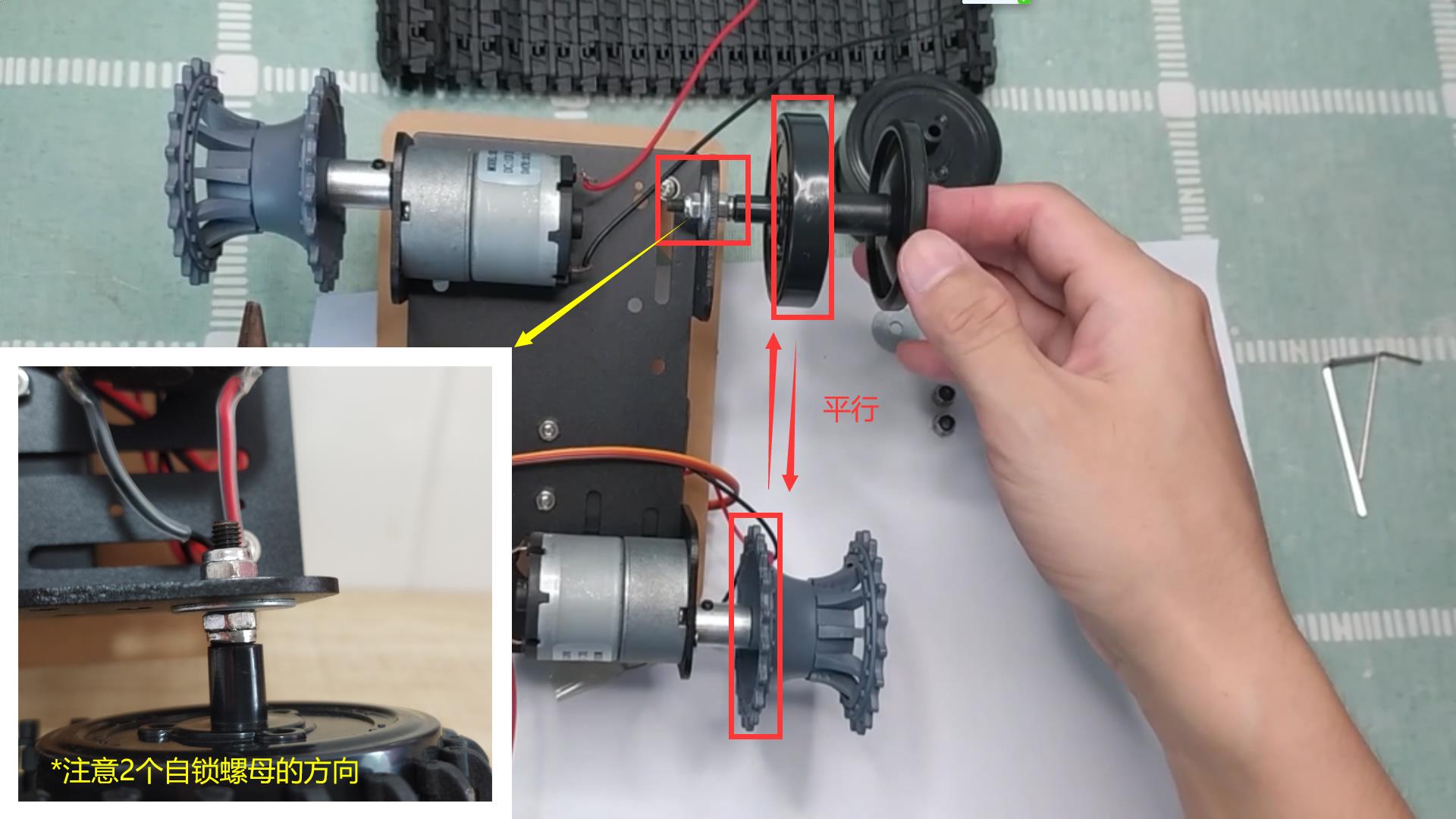
2个驱动轮是在对角,2个承重轮也是在对角。
九、安装履带

安装履带,比较难的就是拆卸履带,可以仔细看视频讲解,找到合适的钢针,然后用牙签或者镊子,将钢针捅出来。
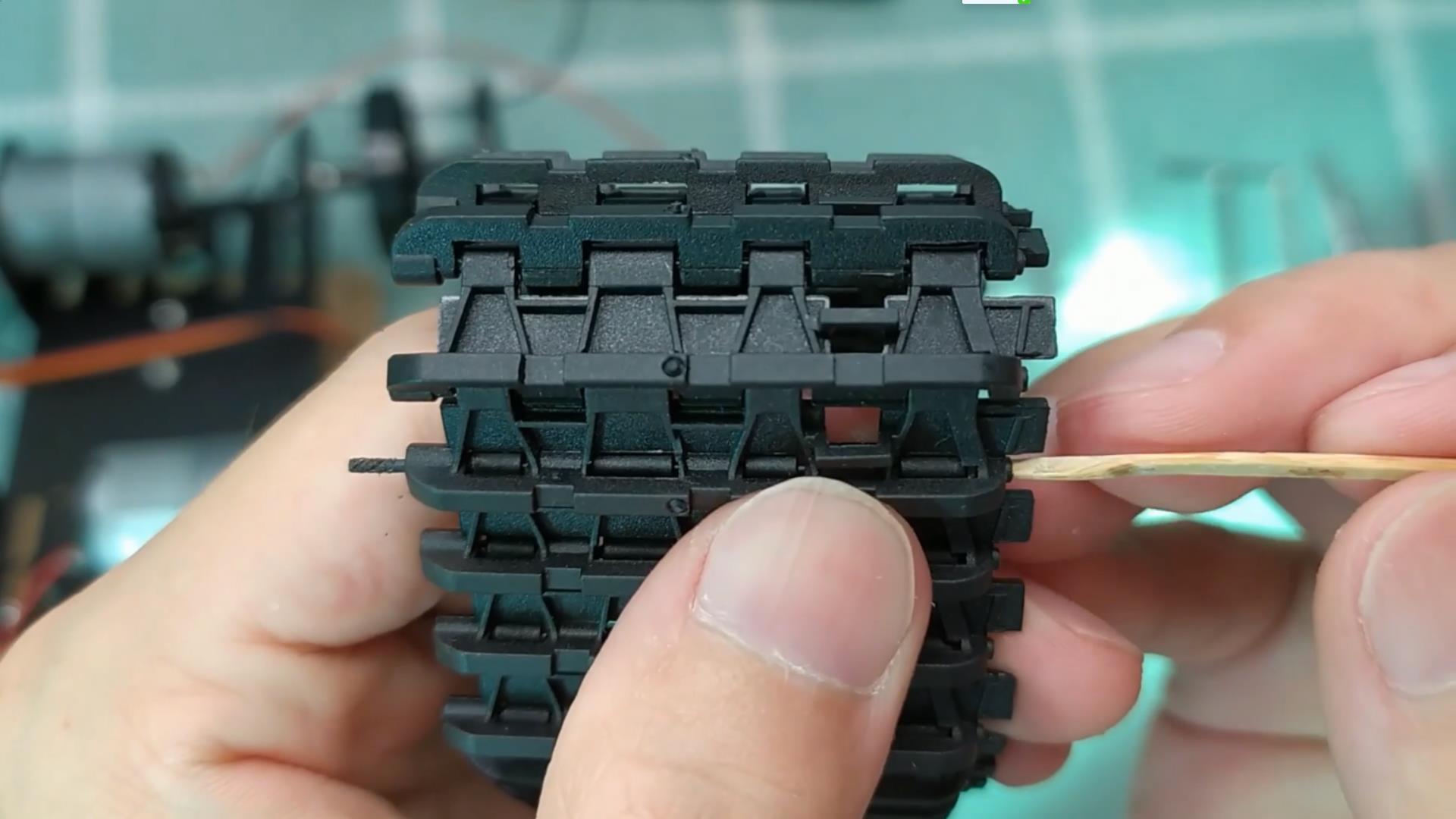
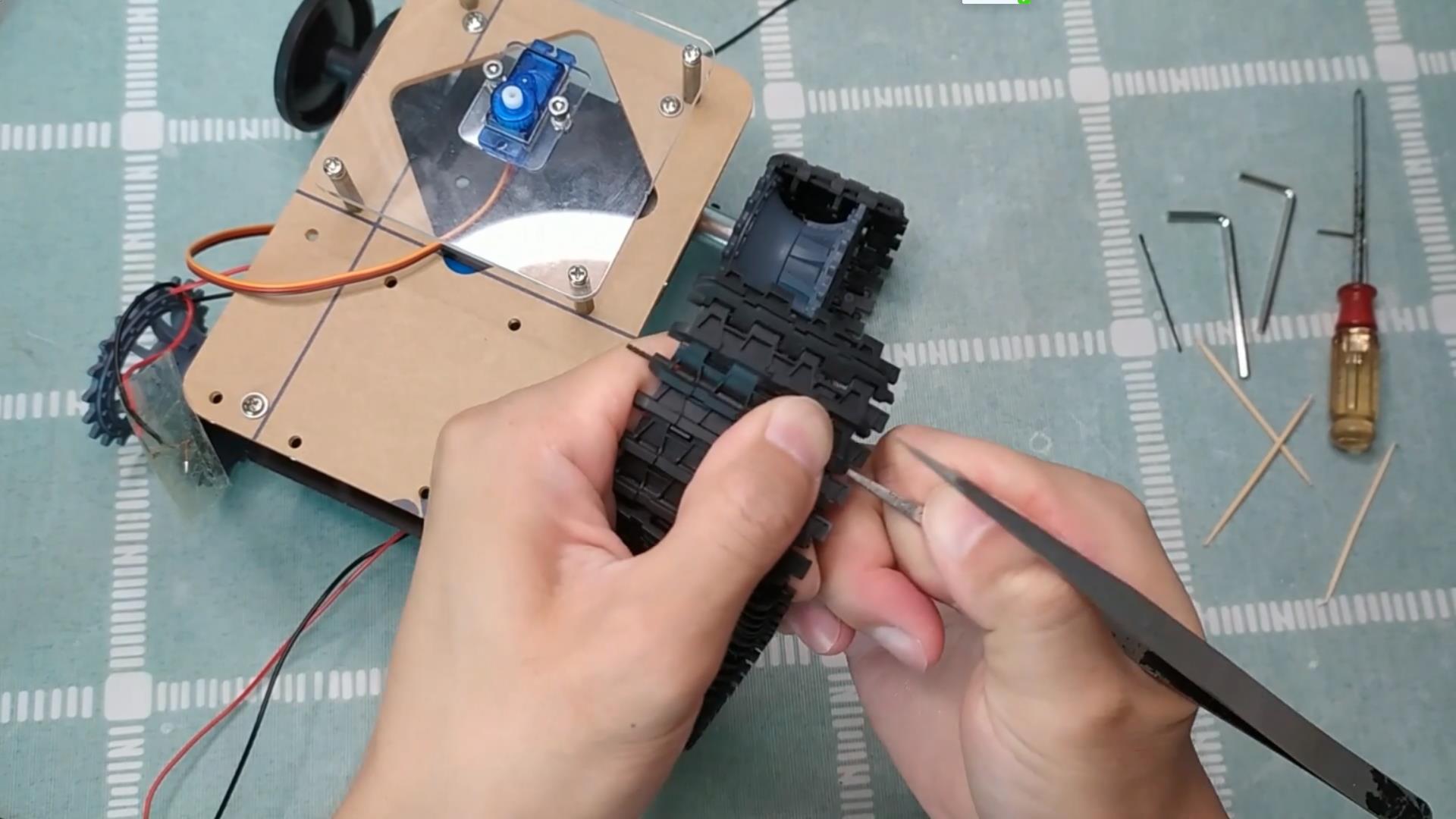
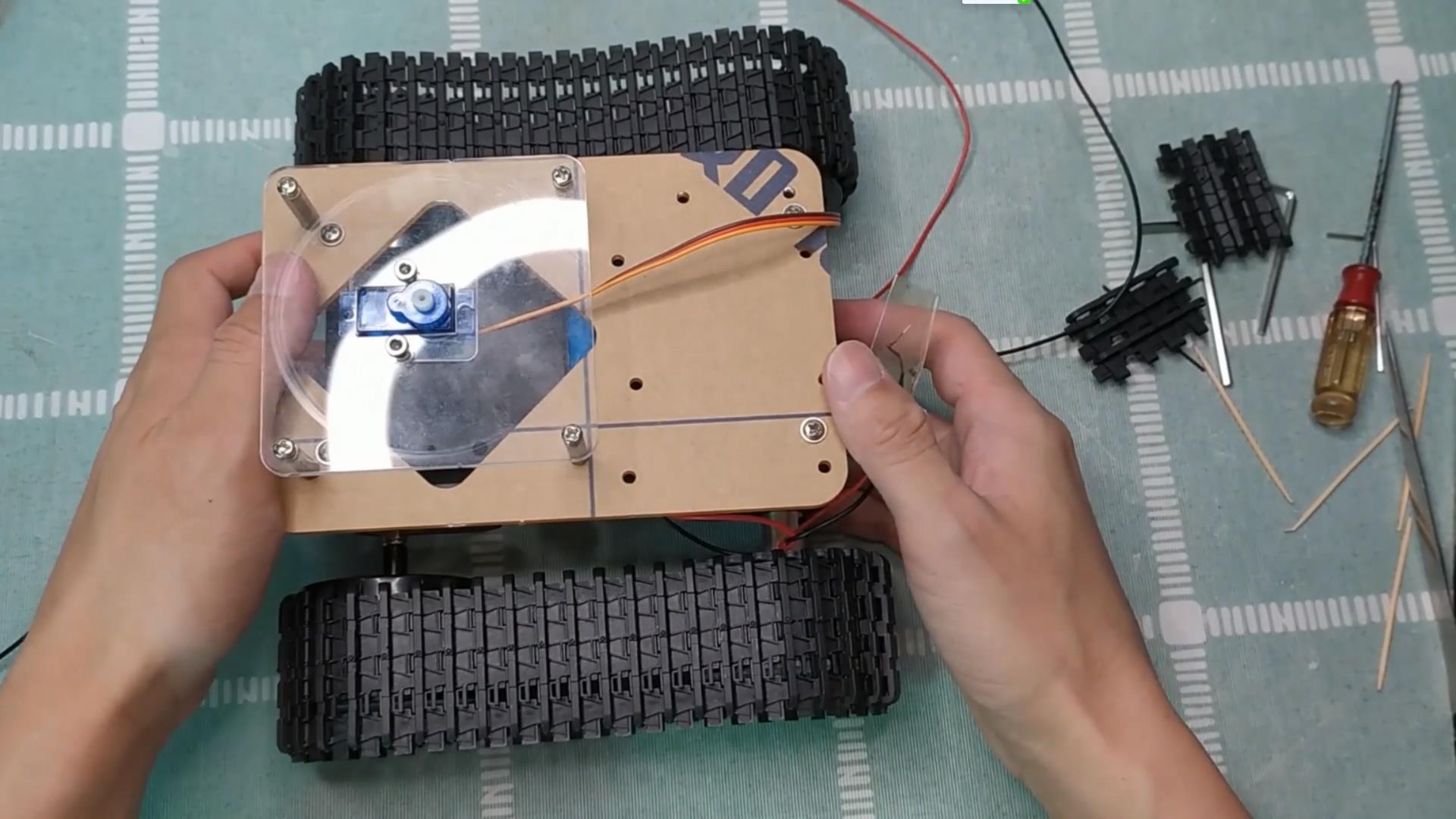
计算好履带的长度后,卸掉多余的几节履带,再把钢针插回去,就把履带接回去安装好了。
十、安装热缩管
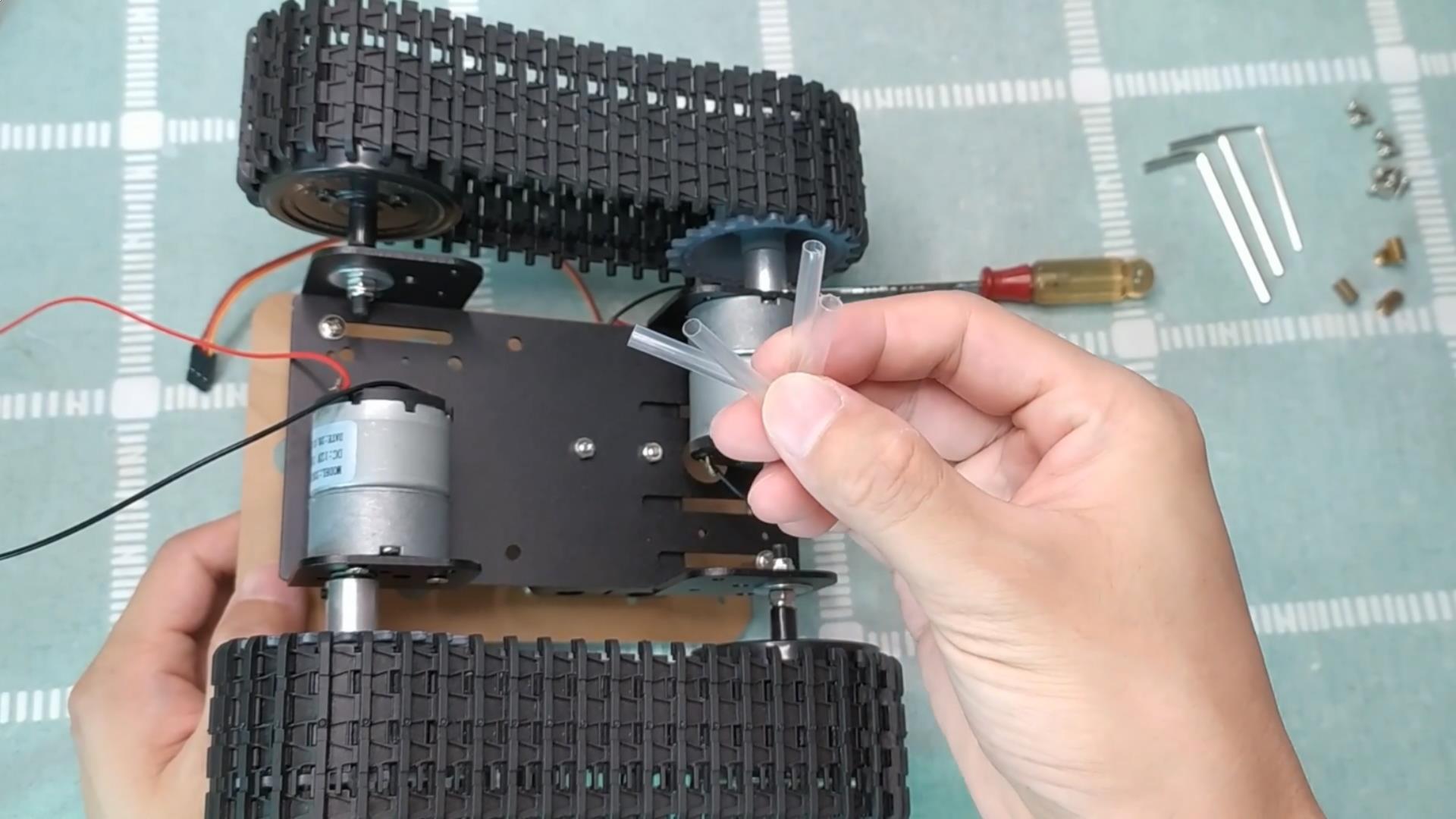
将热缩管套住红黑电源线,和电机的电源铜片接头,把线的方向理顺(朝向arduino主板的位置),然后用热风枪,或者电吹风也行,对着热缩管稍微吹一下,它就会马上收缩、绑紧,可以起到防水、防尘、防损坏的作用。
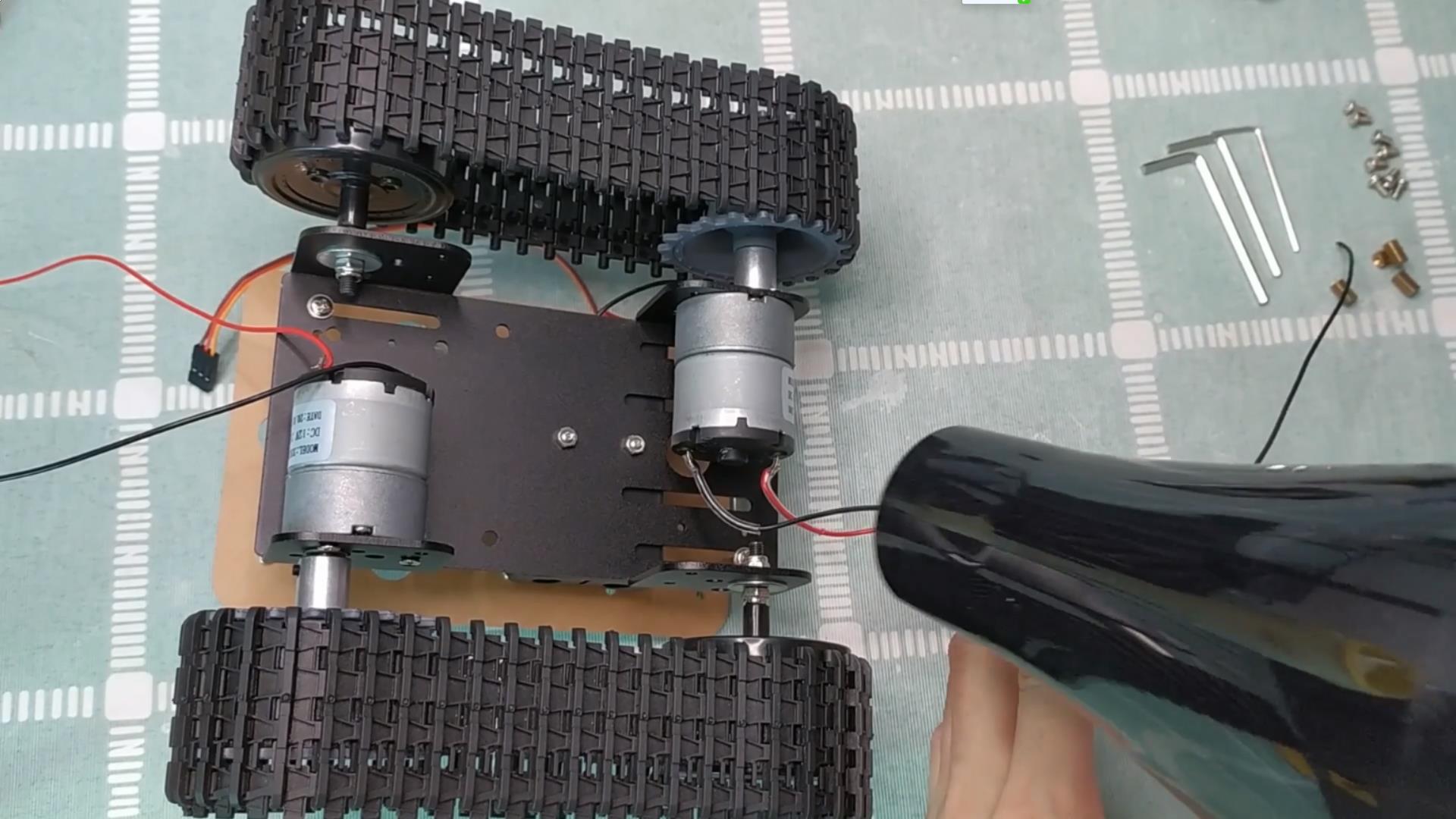
2组红黑电源线,都朝向arduino主板的安装位置。

十一、安装UNO主板
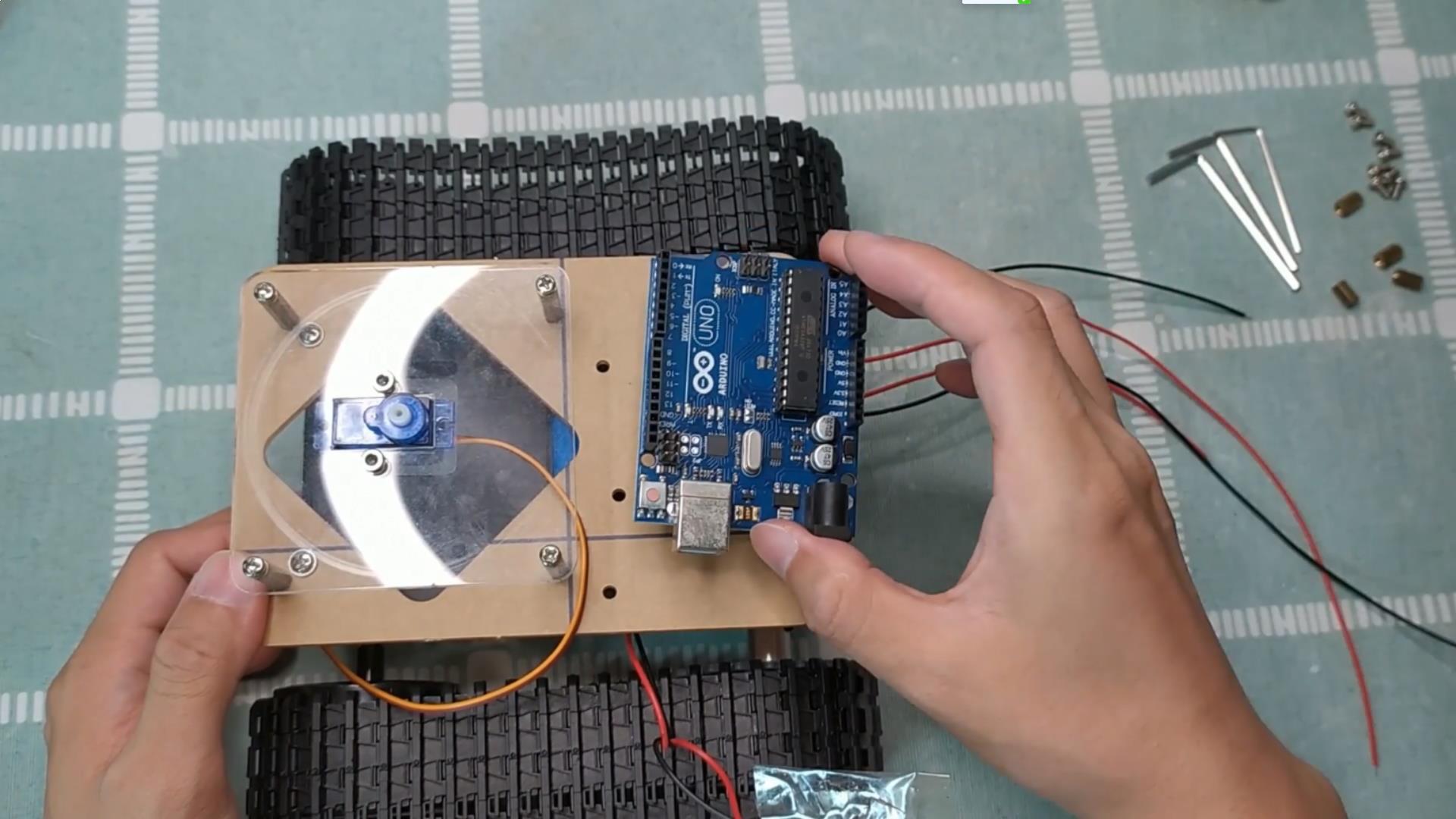
按照机械臂底座上亚克力板的4个螺丝孔位,用12mm双通六角铜柱和M3*6mm圆头十字螺丝,把arduino UNO主板固定住即可。

十二、多种供电方式
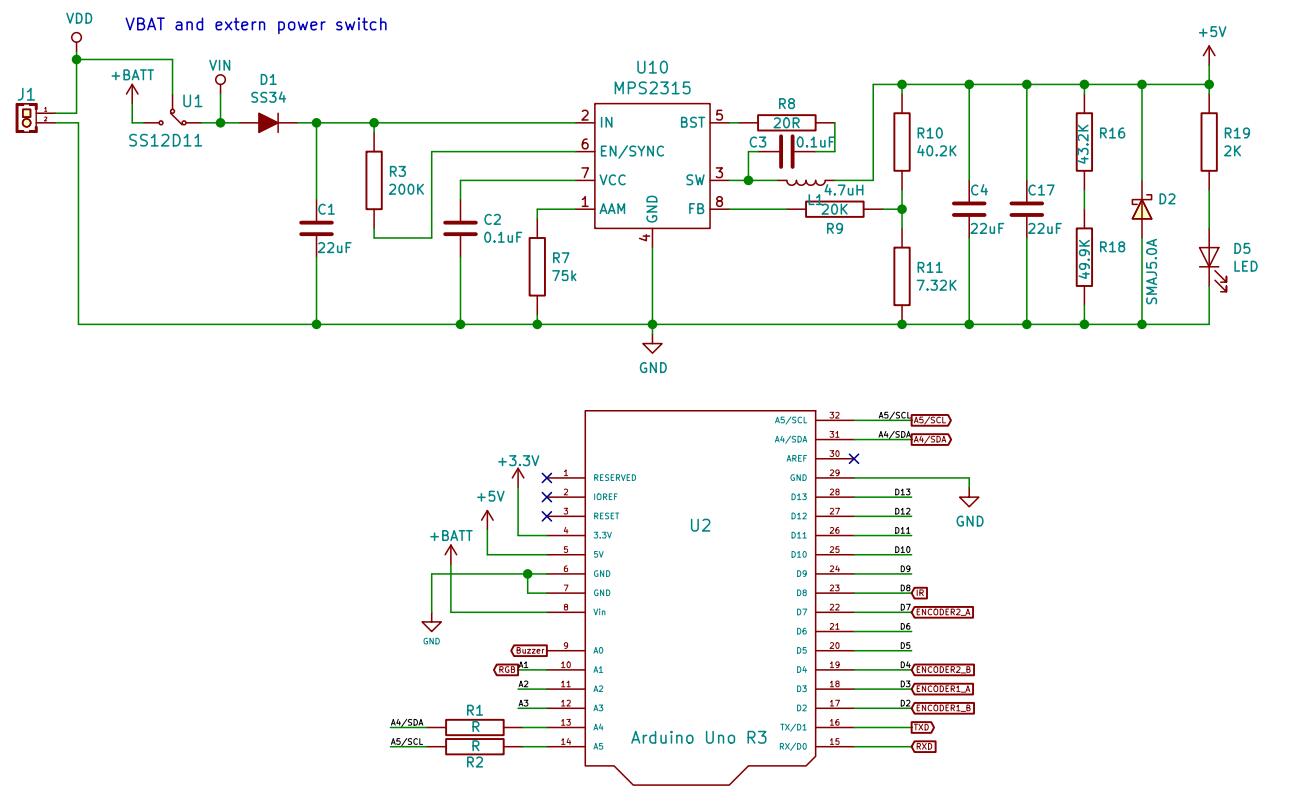
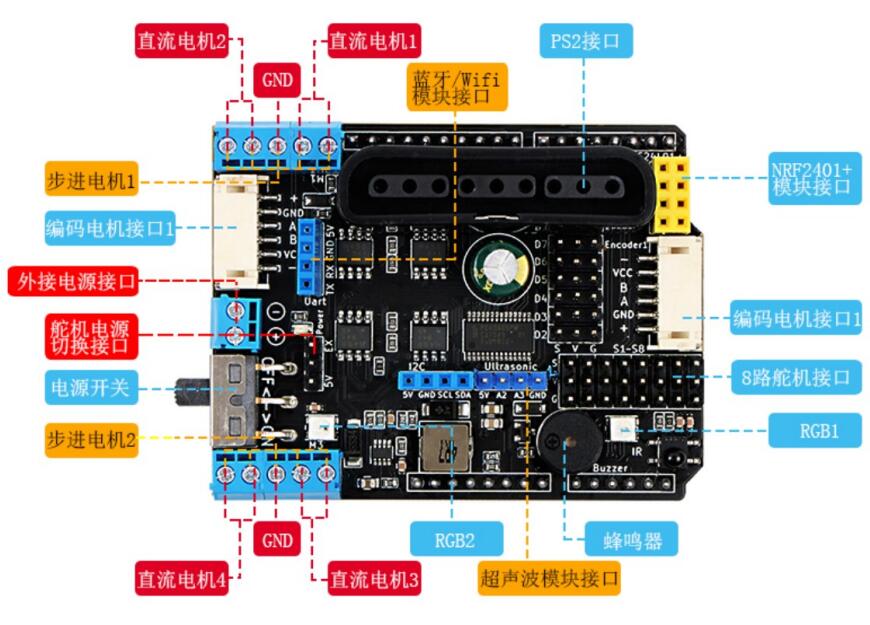
根据这个UNO扩展电机驱动板的原理图和框图,我们可以知道它有两种供电接口,一种是在UNO主板的DC圆孔插座,另外一种就是上图中左侧标注的“外接电源接口”座子,可以选择自己最方便的供电方式。
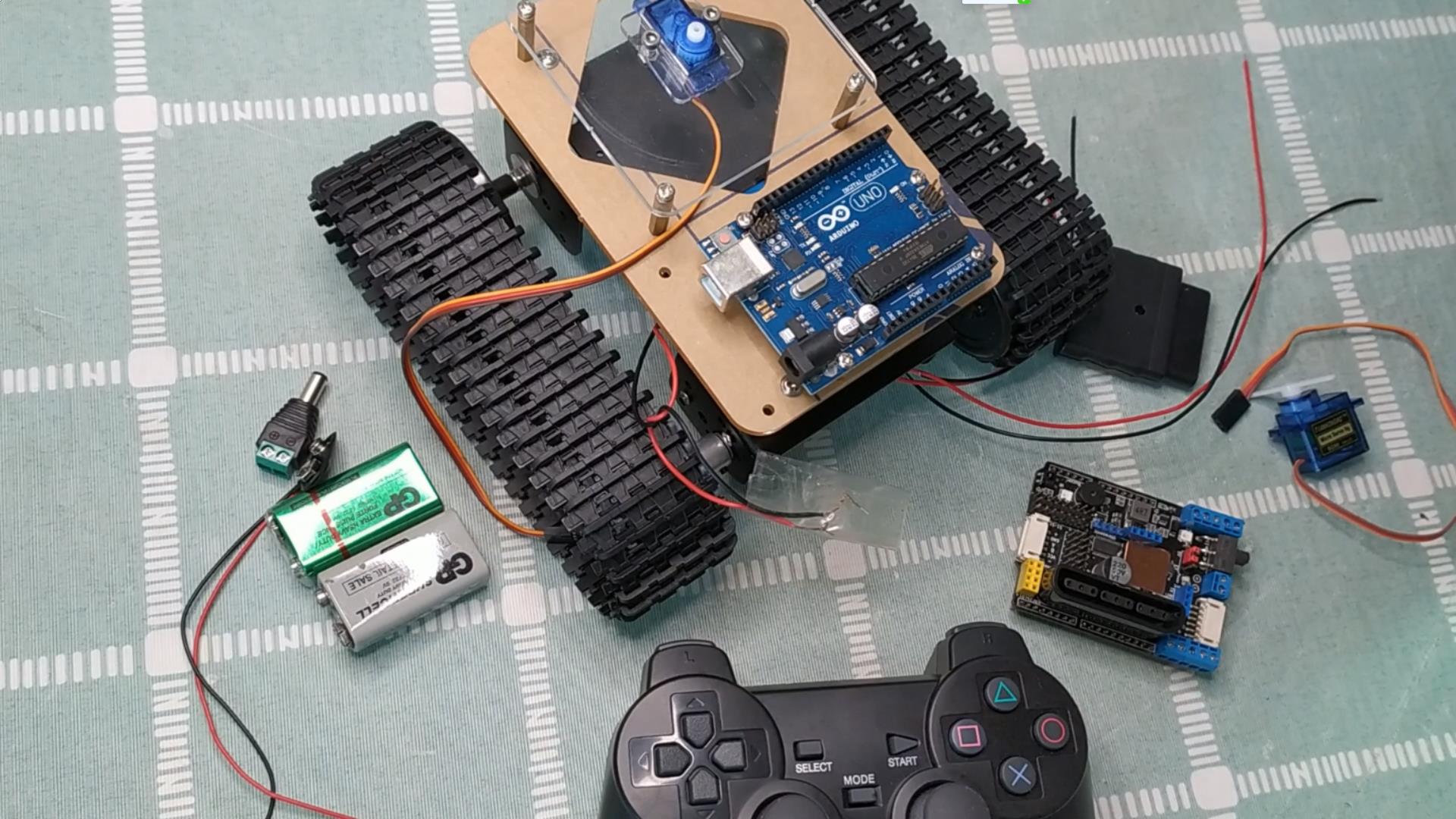
另外我们还提供了两种电池转接头,5.5x2.1mm DC直流电源插头,和9v电池扣,方便大家使用不同的电池供电,但是强烈建议大家选择大容量的锂电池,因为直流减速电机工作电流大、耗电快。
5.5x2.1mm DC直流电源插头,可以接18650电池盒的电源线。

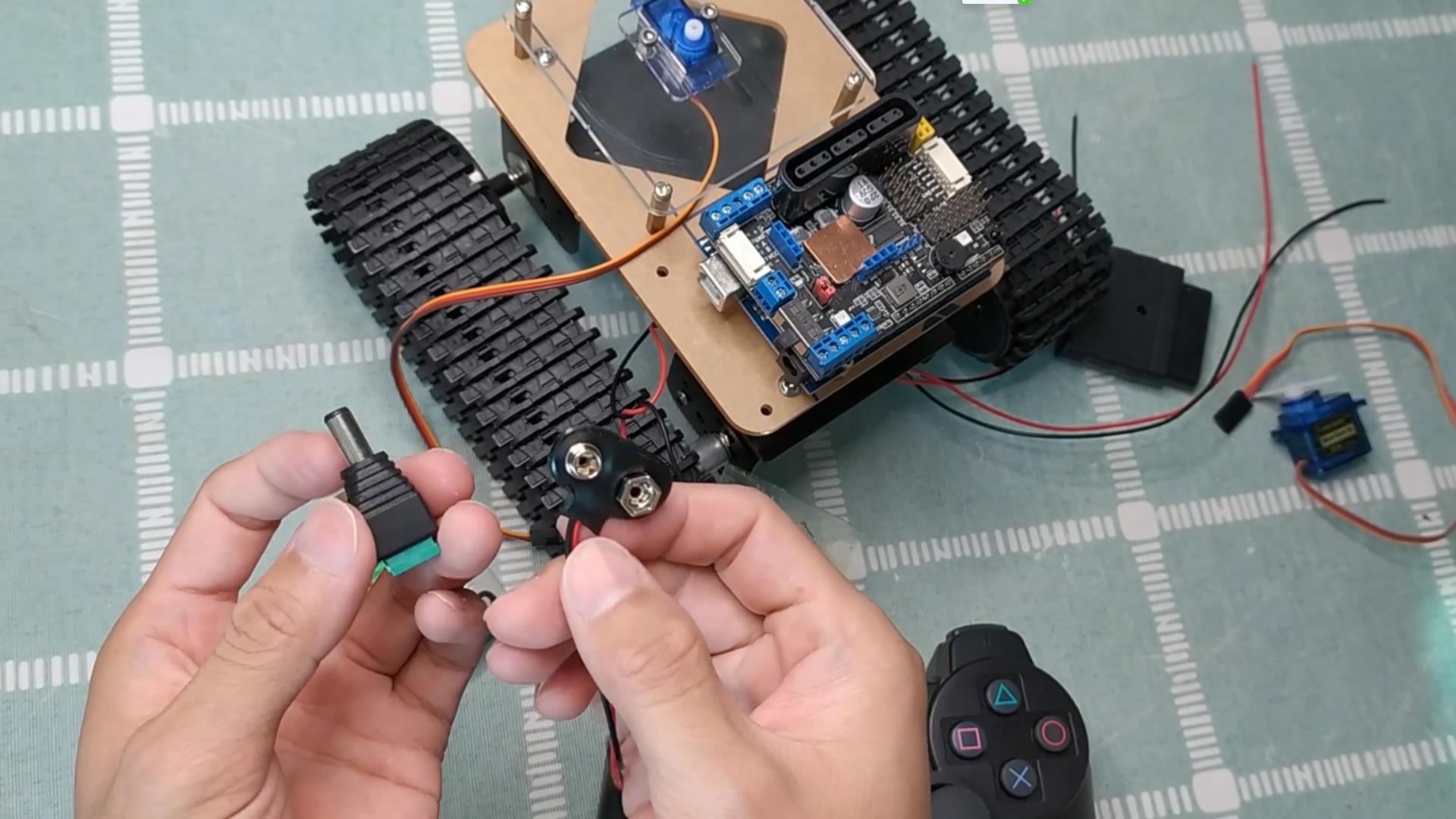
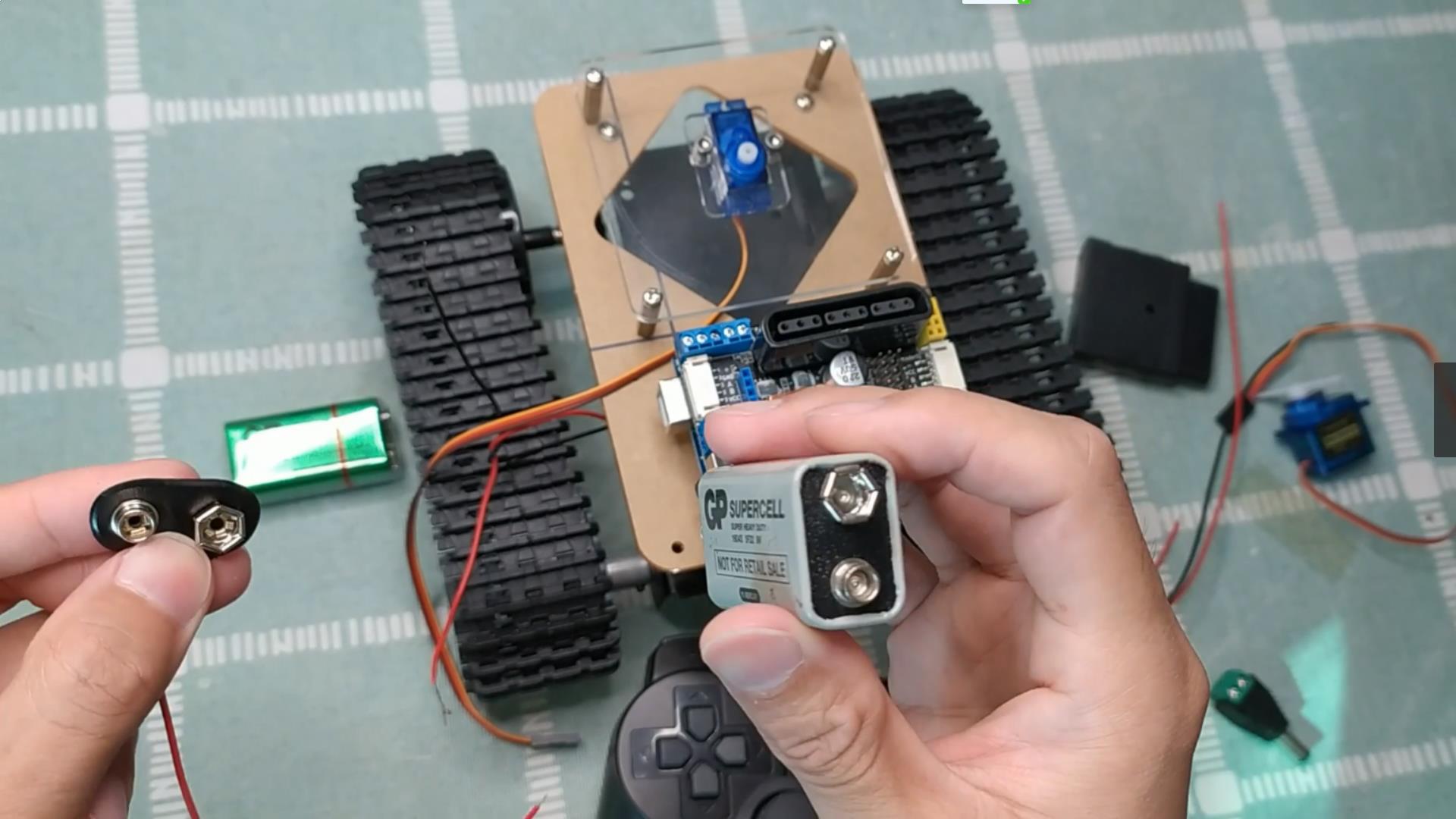
9v电池扣,就是扣在9v长方体电池上,注意正负极方向!!!
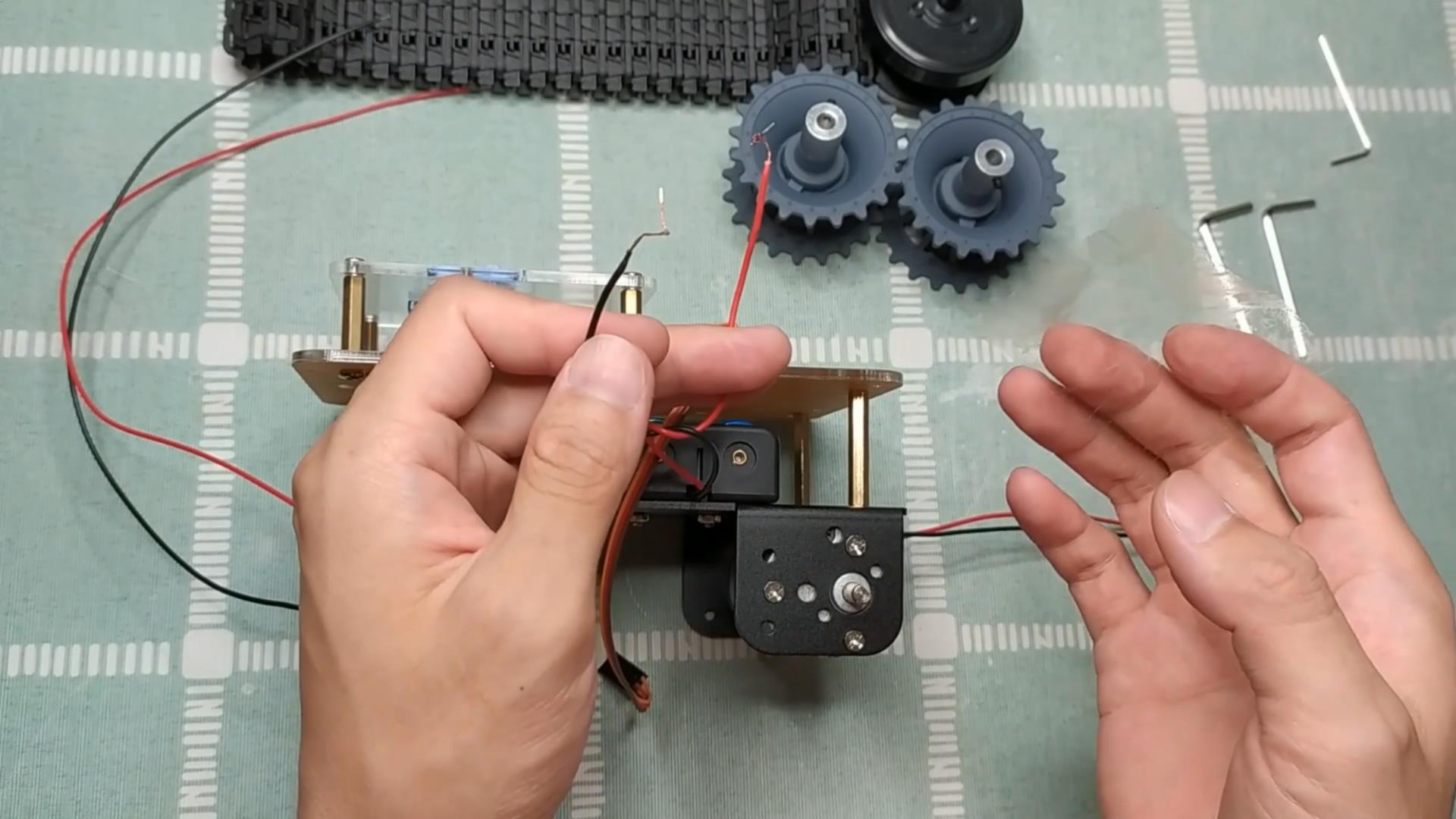
十三、测试坦克车的运动和机械臂的舵机
测试坦克车的运动
测试机械臂的舵机
可以测试坦克车的前进、后退、左转、右转、左旋转、右旋转。
先用某个舵机,单独测试机械臂的4个舵机接口:底座舵机、左臂舵机、右臂舵机、爪子舵机。
如果一切顺利,就把机械臂安装到坦克车上,插上所有舵机线,进行下一步测试。

现在可以测试机械臂的所有活动了,左旋,右旋,向前伸,向后缩,举高,放下。

大功告成,欧耶!!!
以上是关于somebot机械臂智能坦克车应该这样玩儿!的主要内容,如果未能解决你的问题,请参考以下文章