自动驾驶感知——自动驾驶地图
Posted yuan〇
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了自动驾驶感知——自动驾驶地图相关的知识,希望对你有一定的参考价值。
文章目录
1. 地图基础知识
地图作为认识客观世界、传递时空信息的方式之一,随着科学技术的进步,地图制图精度不断提高,表现形式更加多样,应用功能不断扩大,制图理论日趋成熟,地图已成为生产建设、科学试验、日常生活中不可或缺的一种工具。
地图是按照一定的法则,有选择性地以二维或多维形式与手段在平面或球面上表示地球若干现象的图形或图像,它具有严格的数学基础、符号系统、文字注记,并基于地图概括原则,科学地映出自然和社会经济现象的分布特征及其相互关系。
1.1 地图的基本特性
- 地图必须遵循一定的数学法则
- 比例尺
- 地图投影
- 坐标系统
基于数学法则经过投影后的地图具有可量测性。
-
地图必须经过科学概括
经过分类、简化、夸张和符号化,从地理信息形成地图信息的过程就是地图概括. -
地图具有完整的符号系统
把制图对象的地理位置及范围,质量和数量特征,时空分布规律与相互关系,用十分概括与抽象的符号加以表示,使地图具有直观易读性。符号不仅可以是图形,还可以广义的理解为文字注记和数字形式。 -
地图是地理信息的载体
地图容纳和储存了数量巨大的信息,而作为信息的载体,可以是传统概念上的纸质地图、实体模型,可以是各种可视化屏幕影像数字地图、声像地图,也可以是触觉地图。
1.2 地图的构成要素
| 要素名称 | 说明 |
|---|---|
| 图形要素 | 表达地理信息的各种图形符号、文字注记。 |
| 数学要素(地图投影、坐标系统、比例尺、控制点) | 确定地图空间信息的依据,包括比例尺、地图投影,各种坐标系统、控制点。 |
| 辅助要素 | 图名、图廓、图解比例尺、图例、地图编号、三北方向线、编制出版信息等辅助地图使用的要素。 |
| 补充说明 | 对主要图件在内容与形式上的补充。 |
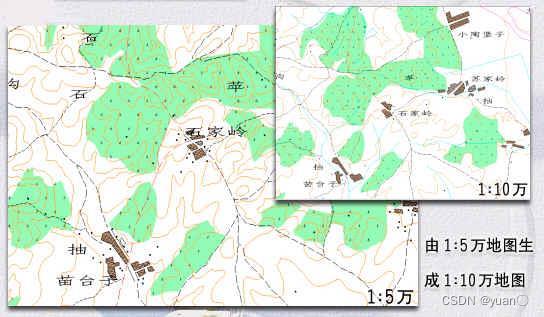
1.3 地图的比例尺
比例尺: 它表示地图图形的缩小程度,又称缩尺.
小比例尺地形图:1:100万
中比例尺地形图:1:50万、1:25万
大比例尺地形图:1:10万、1:5万、1:2.5万、1:1万、1:5千
比例尺越大误差越小,图上测量精度越高
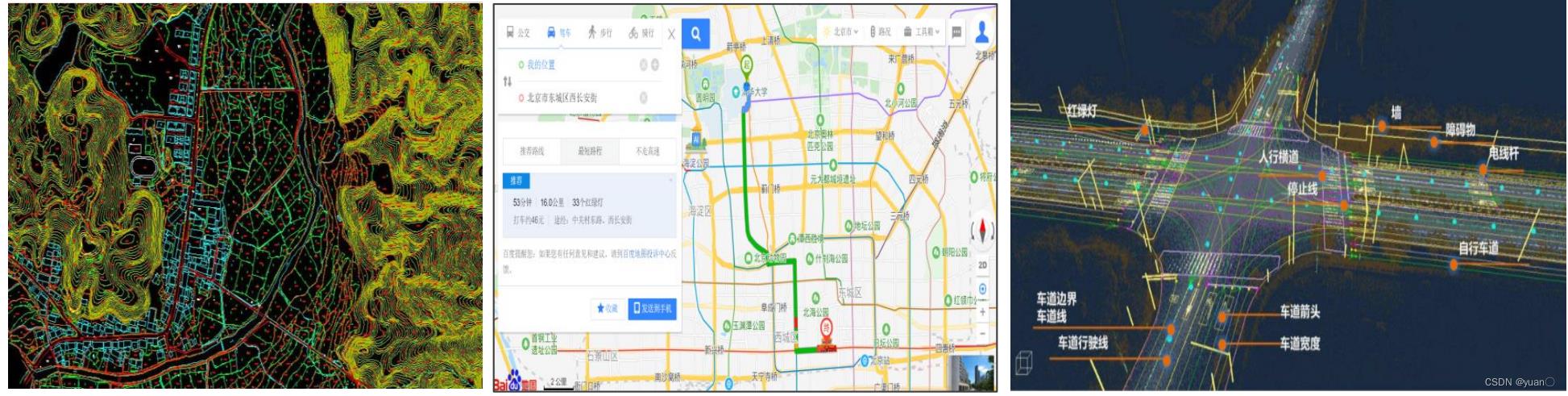
2. 电子地图
电子地图定义
- 狭义:以数字地图数据为数据基础,以计算机系统为处理平台,在屏幕上实时显示的地图。
- 广义:屏幕地图和支持其显示的地图软件的总称。
最早的电子地图仅仅是纸质地图的数字化,即以位图格式存储的地图,随着电子地图的发展,其功能也在不断完善。
电子地图:分层路网,根据道路属性的不同,需要组织为不同级别的路网,全国骨干路网,城市骨干路网,详细路网等,需求不同时,将在不同路网进行道路规划,不同的比例尺下,显示不同的道路内容等。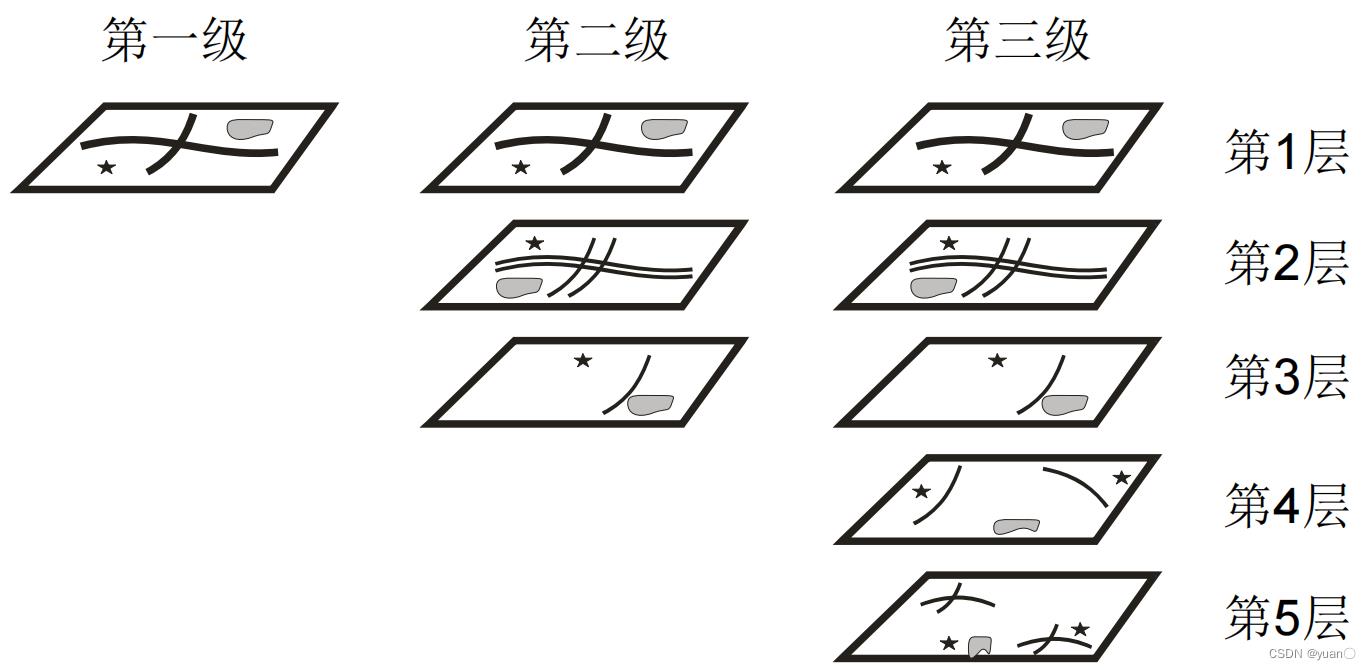
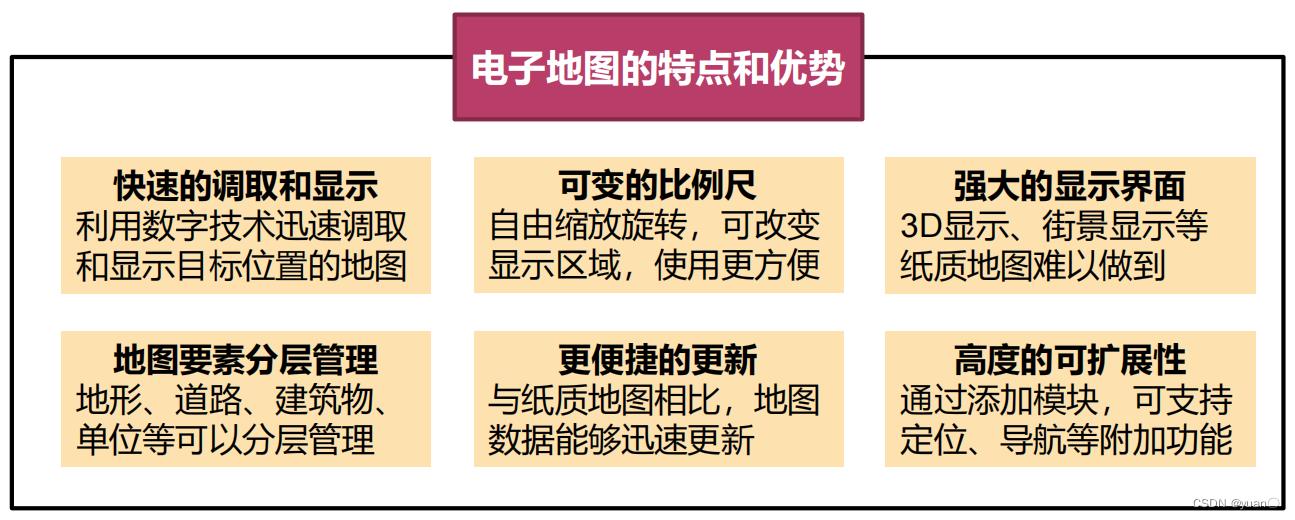
2.1 电子地图的特点和优势
2.2 构建电子地图
构建电子地图要从以下三个方面进行:
- 不同地图要素用数学符号进行抽象表达
- 建立要素之间以及图层之间逻辑关系
- 完善社会相关属性信息(与交通相关的属性)
2.3 存储和表达电子地图
导航电子地图以分块存储的方式存储图层以及逻辑关系,同时需要表达出以下信息。
➢ 路网对象:道路,路口,拓扑连接关系
➢ POI兴趣点:加油站、商场、建筑、餐馆、公司单位
➢ 背景对象:水系、绿地、行政区划
2.3.1 电子地图分块存储

基础数据通常使用1:2.5万标准比例尺所对应的分块方案。每块大约是一个10Km×10Km的矩形。
全国地图按照2.5万比例尺标准块,可以分为近25万块。
完整的数字路网就需要将这25万块的路网数据拼接为一张整网,表达一个完整的逻辑。
2.4 电子地图中的路网层
路网层是车载电子地图的核心,而路网层的核心就是其路网数学模型。路网层的数学模型是用来描述道路之间、道路与路口之间的数学逻辑关系,需要正确描述道路网络在空间上的连通性以及实际连通性。

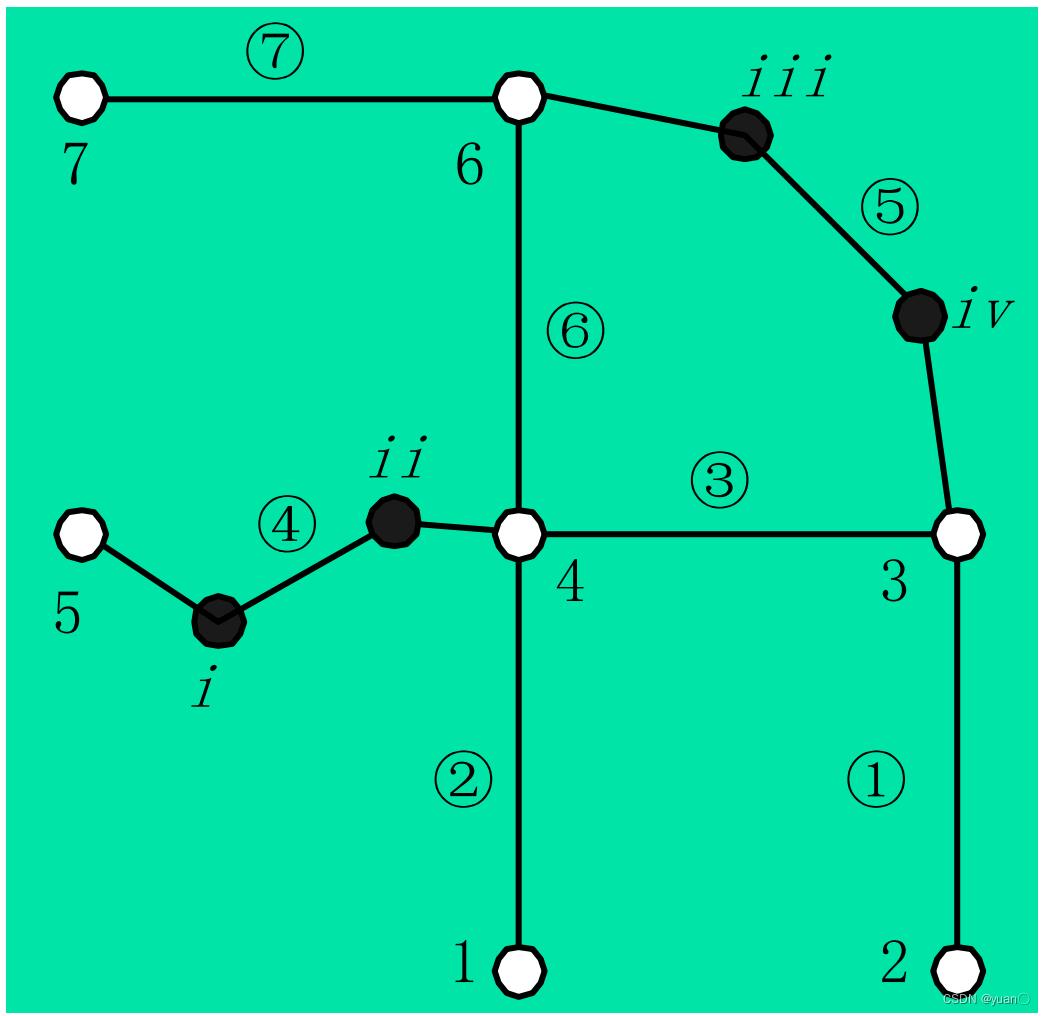
2.4.1 路网中的基本元素
➢ 节点
道路交叉口、道路尽头以及道路属性改变的地方均可以用节点来表示
➢ 道路
道路用折线表示,实际表述了节点与节点之间的物理上的联通关系
➢ 形状点
表示道路的形状
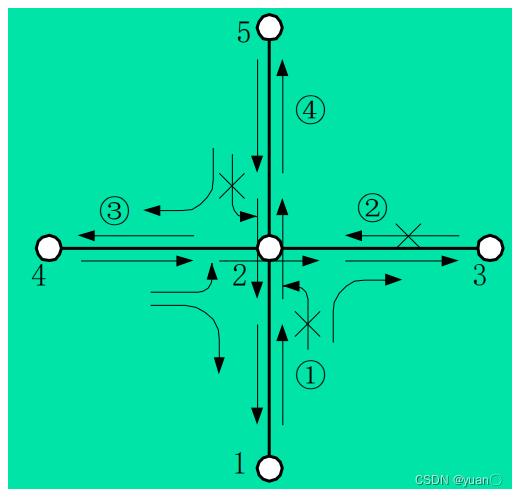
2.4.2 路网中的交通限制信息
路网中的交通限制信息可以分为
➢ 道路本身的单行限制信息。利用有序节点对道路单行属性来控制。道路单行属性还可以用来表示由单行造成的转弯限制信息。
➢ 交叉道口的转弯限制信息。利用有序道路对的形式来表示交叉道口的转弯限制。
2.4.3 路网描述
路网可由三个集合来描述
➢ 节点集
N
N
N
➢ 道路集
R
R
R:其元素是有序节点对
➢ 转弯限制集
Ф
Ф
Ф:元素是有序道路对
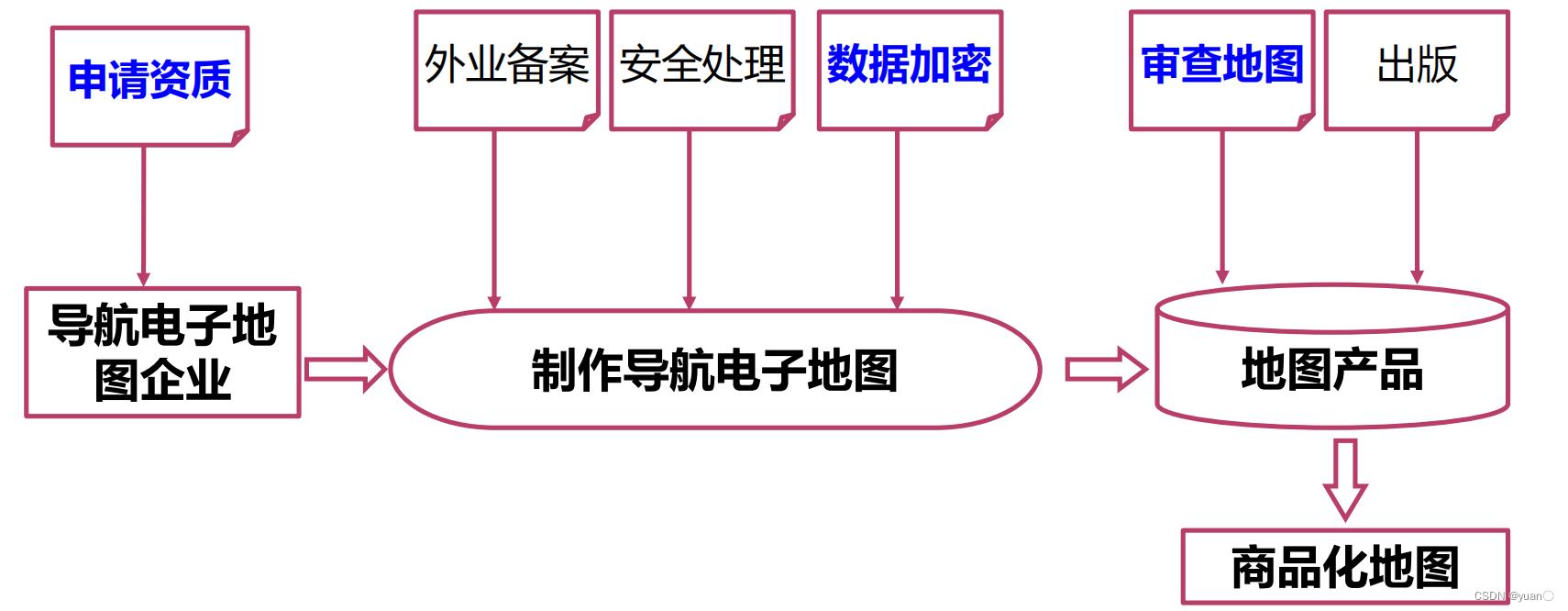
2.5 导航电子地图制作流程
3. 自动驾驶地图
高精度地图部分还可以参考这篇文章——Apollo星火计划学习笔记——第四讲(Apollo自动驾驶高精地图)
3.1 自动驾驶地图的定义
• HD MAP = High Definition Map 高分辨率地图
• HAD MAP = Highly Automated Driving Map 高度自动驾驶地图
高精度自动驾驶地图通过精细化描述道路、车道线、路沿、交通标志等静态与动态信息,为自动驾驶定位、规划、决策、控制等应用提供安全保障,是自动驾驶领域的核心与重要基础。可以简称为“自动驾驶地图”,“高精度地图”,也可以称为“高精度自动驾驶地图”,HD或者HAD MAP。
3.2 高精度自动驾驶地图与导航地图的区别与关联

高精地图是导航地图的延伸,精度更高、维度更广!
3.3 高精度地图特征
- 高绝对坐标精度(绝对坐标精度指的是地图上某个目标和真实世界事物之间的精度)
- 丰富道路交通信息元素,最重要的就是道路网的精确三维表征,比如交叉路口的布局和路标位置等,还包含了很多语义信息,比如信号灯颜色定义、道路限速信息、车辆转弯开始位置等。
- 高更新频率,提供最新、最准确的静态信息;提供实时的交通状况、障碍物等动态信息。
3.4 地图格式规范(以Opendrive为例)
➢ OpenDrive是开放平台,由从事仿真开发的企业联盟创建,VIRES GmbH 公司维护,非常适合于各种自动驾驶仿真。
➢ OpenDRIVE是一种开放的文件格式, 用于路网的逻辑描述;
➢ OpenDRIVE地图模型面向自动驾驶服务,支持三维形状信息的精细表达;
➢ 面向局部静态信息设计XML架构实现分层存储,以道路、路口为单元,将车道及其他元素按照严格层级继承关系实现集中式存储。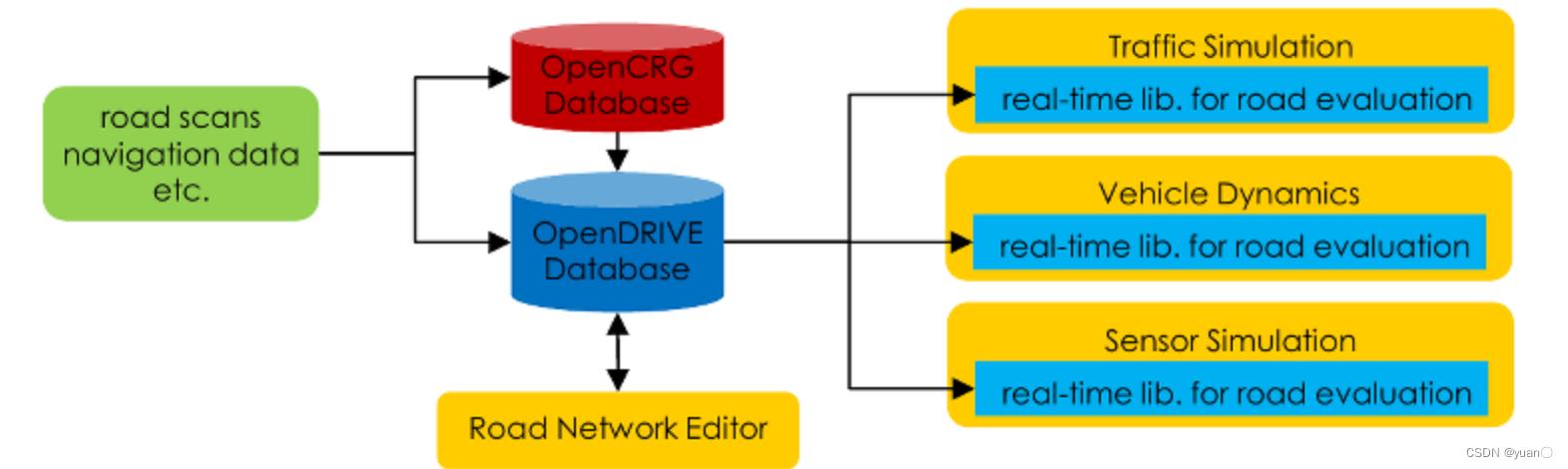
3.5 自动驾驶高精地图制作流程
高精地图数据制作包括四个流程,分别为数据采集、自动化提取、制作检核和验证、地图编译和发布。

3.5.1 数据采集
数据采集是一项庞大的任务,需要投入大量的采集车负责收集用于高精地图制作的源数据,而且道路环境不断变化,为保持高精地图的鲜度,需确保每次发生变化时,高精地图均会得到快速更新以保证自动驾驶汽车的安全性。
采集车是数据采集的核心载体,搭载了激光雷达、摄像头、IMU和GNSS等系统及传感器设备。采集数据包括行车轨迹、图像、点云等数据,拥有车道线、路沿、护栏、路灯、交通标志牌等信息。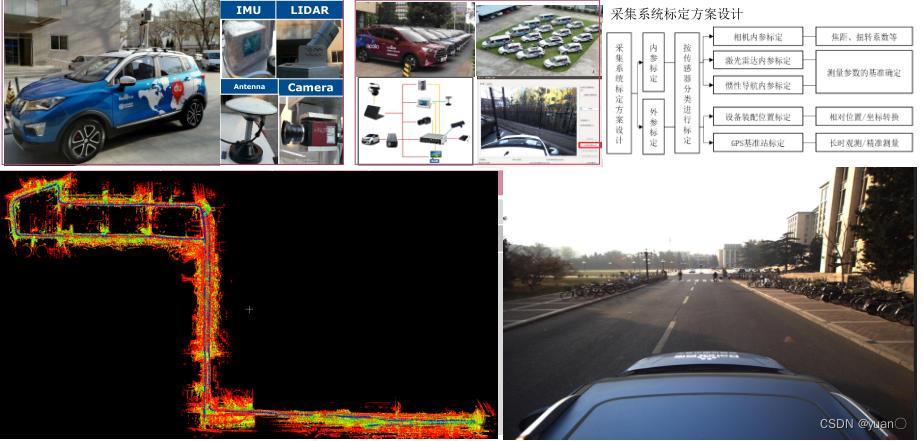 高精度地图采集制作以集中制图为主,目前逐步向众源式转变
高精度地图采集制作以集中制图为主,目前逐步向众源式转变
3.5.2 自动化提取
高精度自动驾驶地图生产中,对道路元素的检测与识别要求较高,目前主流的方式为基于深度学习的图像识别算法进行车道线、地面标志线、交通标志牌的识别,例如Faster-RCNN,Mask R-CNN, YoloV3,Deeplabv3等;
利用激光雷达可以重建道路三维环境,并进行道路要素提取与识别,以准确反映道路环境并描述道路环境特征,不仅可以得到高精点云地图,而且可以与影像融合处理,实现高精准度的道路要素识别。
基于激光雷达点云和图像多传感器数据融合可以识别车道标志、障碍物和交通标志,自动化率 90%+,识别要素以及识别率和准确率参考下图,相对精度可以达到20cm。
对于误识别、漏识别的要素需要进行人工检核与验证。
高精度地图技术的发展促进了测绘技术的变革,传统地图是人力和资金密集,以人力加工为主,高精度地图则以人工智能几乎自动化加工处理为主。
3.5.3 制作检核和验证
由于自动识别存在漏检、误差及错误,需要增加人工检核与验证环节以保证地图创建过程正确性与完整性。
- 通过自动提取获取的高精地图数据与对应的图像信息进行比对,寻找错误并进行改正,包括
➢ 车道线识别是否正确;
➢ 信号灯及标志牌的逻辑处理;
➢ 路口虚拟道路逻辑线生成;
➢ 涉及红绿灯与相应停止线的逻辑信息处理 - 还需要为自动化处理的地图数据完善对应的属性信息,例如:车道线类型、车道线颜色、车道通行状态等属性信息。
3.5.4 地图编译和发布
➢ 加工的地图数据数据以专业的测量设备Reigl采集制作数据为真值做评估。
➢ 将加工后的高精度自动驾驶地图数据进行编译,生成可供自动驾驶应用且符合格式规范(NDS、OpenDRIVE等)的高精地图。
国土资源部地理信息管理司,地图审查中心,测科院已经初步完成了自动驾驶地图的插件方案。新版偏转插件经过测试满足现阶段(L3)自动驾驶需求。
- 数据:申请-审批-提供数据-加密-编
译-送审-审图-发布 - 插件:申请-审批-功能代码-测科院联编-验证-可执行模块-发布。
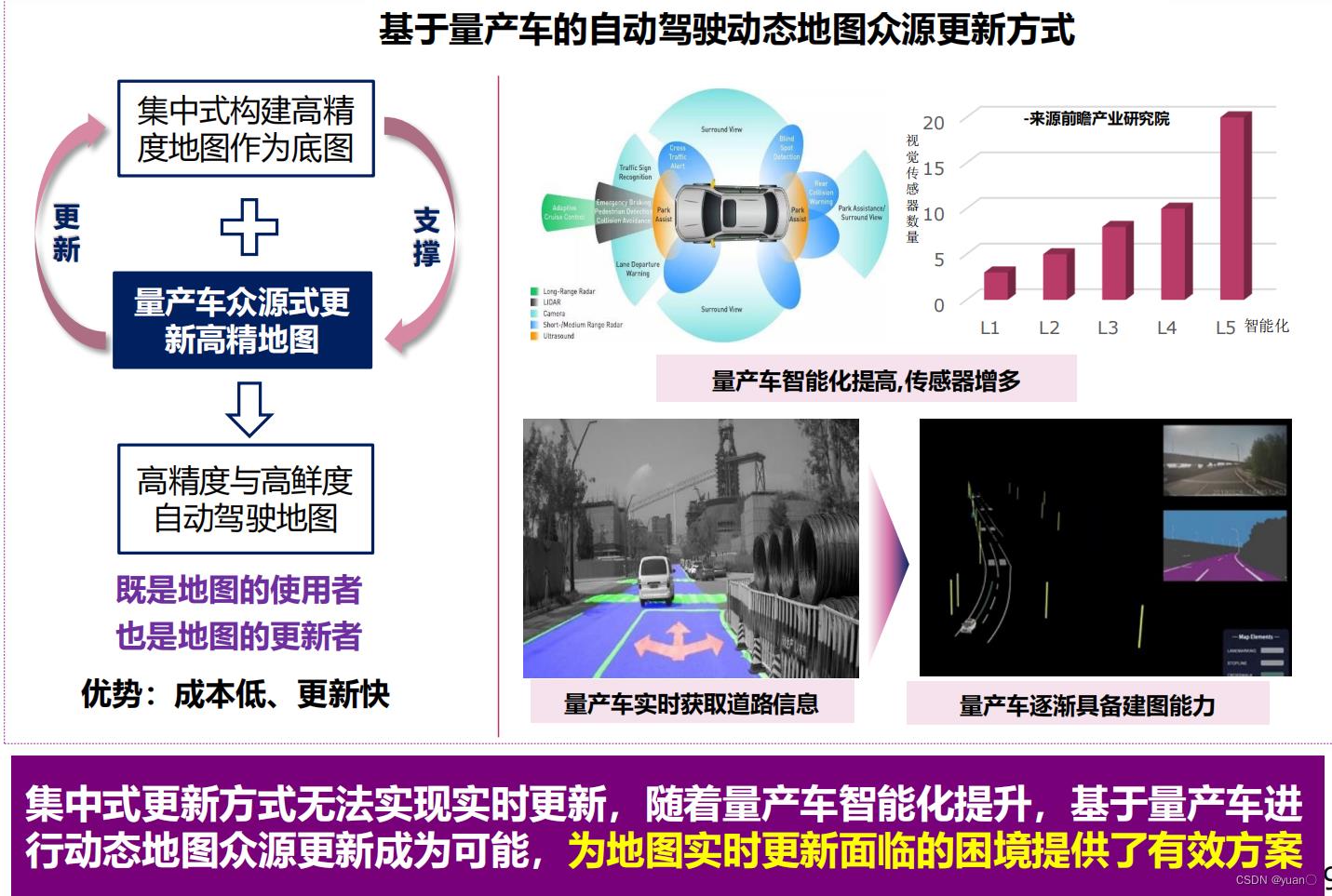
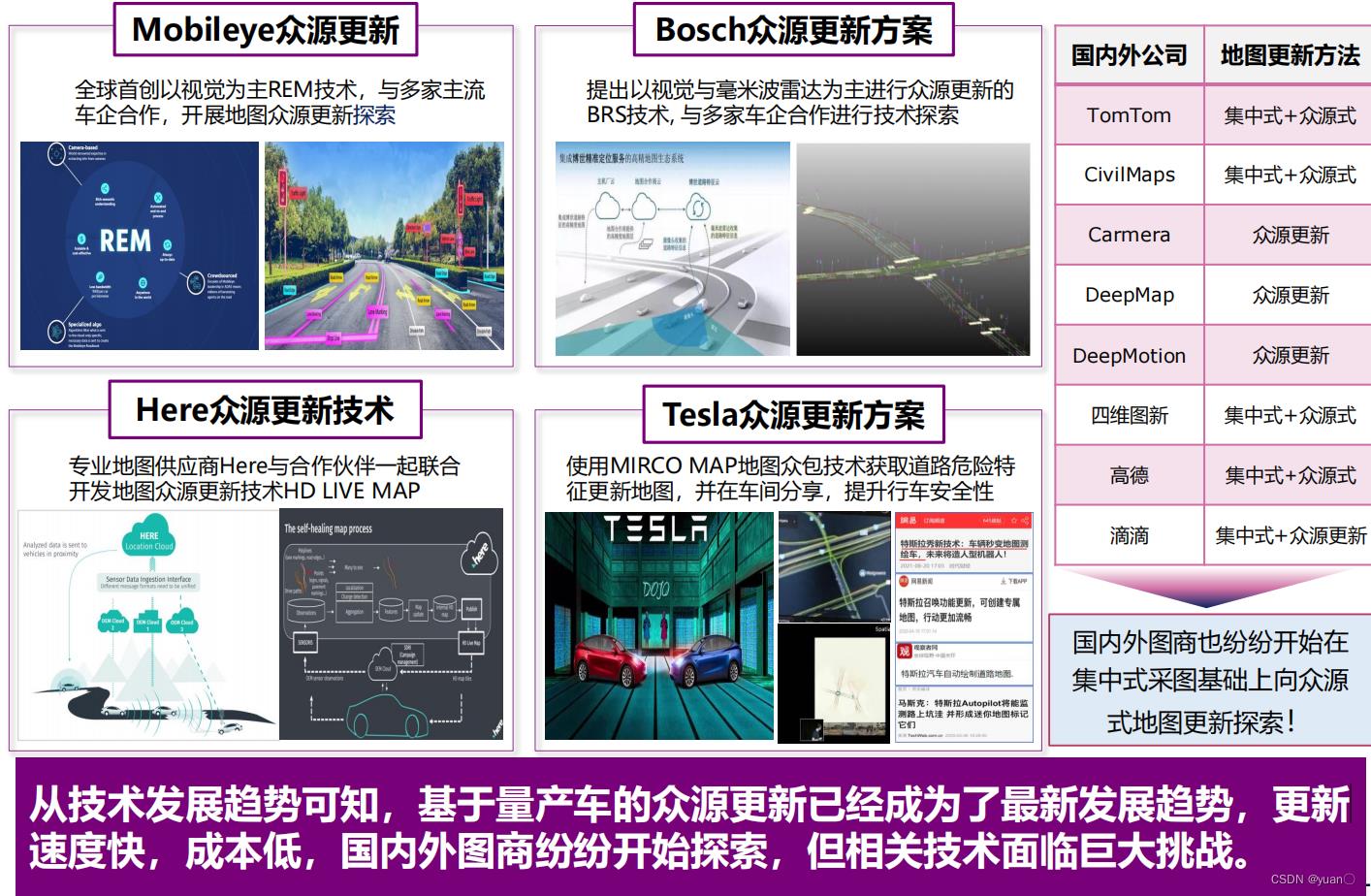
3.6 自动驾驶地图现状与趋势

声明
本人所有文章仅作为自己的学习记录,若有侵权,联系立删。本系列文章主要参考了清华大学、北京理工大学、哈尔滨工业大学、深蓝学院、百度Apollo等相关课程。
以上是关于自动驾驶感知——自动驾驶地图的主要内容,如果未能解决你的问题,请参考以下文章
自动驾驶 Apollo 源码分析系列,感知篇:车道线 Dark SCNN 算法简述及车道线后处理代码细节简述
自动驾驶 Apollo 源码分析系列,感知篇:车道线 Dark SCNN 算法简述及车道线后处理代码细节简述