基于国产 ARM + FPGA+Codesys运动控制平台的智能人机交互系统设计
Posted 深圳信迈科技DSP+ARM+FPGA
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于国产 ARM + FPGA+Codesys运动控制平台的智能人机交互系统设计相关的知识,希望对你有一定的参考价值。
摘 要: 为了满足继电保护领域智能保护装置显示系统的需求,提出了一种基于国产 ARM 处理器和 FPGA 的智能人机交互系统的设计方案 。 该方案重点阐述了智能人机交互系统的功能架构及硬件设 计方案,并介绍了数据交换和人机交互的软件设计流程 。 实验结果表明,该方案硬件结构简单,系统 物料自主可控且系统安全稳定,能满足电力系统智能保护装置的功能需求。 0 引 言 随着第三代智能变电站的大规模推广应用, 以信息数字化、 平台网络化为标志的智能保护装 置在电力系统中逐渐发挥越来越大的作用 [1] 。 作为智能保护装置的重要组成部分,人机交互系 统在信息查看、 定值整定 、 开出传动 、 装置调试等 工作中的重要性日益突出[2] ,其硬件功能的安全 性与稳定性关系到保护装置运行的可靠性。 当前,国内主流智能保护装置的人机交互系 统是以 ARM + 交换芯片为架构进行设计的,此种 架构能满足智能保护装置的多数交互需求,但是 在网络风暴的抑制及调试便捷性方面稍显不足。 当前主流的人机交互系统是以国外芯片为基础设 计的,随时都有被限制的可能。 针对以上问题,本文提出了一种基于国产 ARM 处理器与 FPGA 的智能人机交互系统,实现 了智能保护装置的人机交互功能与装置调试功能, FPGA 的可编程性为智能人机的后续功能开 发升级提供了保障。 1 系统架构及原理 1.1 系统架构 作为智能保护装置的人机交互窗口,智能人 机交互系统不但是装置信息查看、 定值整定 、 开出 传动等继保调试工作的操作界面,而且为装置硬 件调试、 装置故障分析 、 保护装置软件升级等工作 提供了重要接口。 本文提出的智能人机交互系统以百兆以太网 为接口与智能保护装置管理机进行通信,将数字 化、 网络化的装置内部信息转换为可视画面,完成 智能保护装置的人机交互、 装置调试 、 装置故障分 析等重要功能。 系统总体功能架构如图 1 所示 。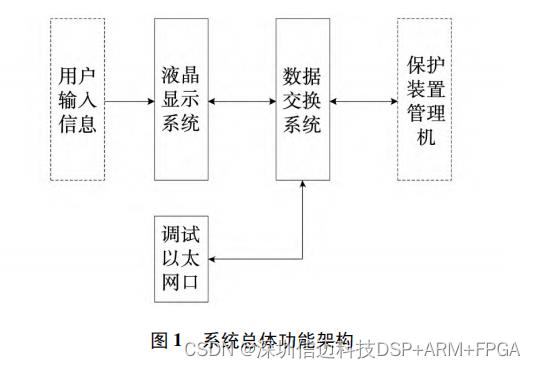 系统主要包括以下功能:
①
数据交换功能:
FPGA
提供三个百兆以太 网接口,分别连接 ARM
处理器
、
调试网口和保护
装置,对人机交互信息
、
用户调试信息和装置内部 信息进行交互。
②
人机交互功能:
ARM
处理器驱动液晶屏, 显示保护装置输出的信息,同时接收液晶屏和按 键输入的用户信息,发送给 FPGA
。
③
程序存储与加载功能:
FPGA
的位流存储 在外部 Flash
中,在上电过程中,
FPGA
会主动通 过 SPI
接口从外部
Flash
中读取位流
。
程序加载 完成,FPGA 开始进行数据交换
。
1. 2 工作原理
智能人机交互系统整体采用液晶屏
+ ARM 控制器 + FPGA
的方案,
ARM
控制器与液晶屏
、
按键和
LED
灯组成人机交互界面,提供保护装置 操作界面并接受用户的按键信息输入; ARM
控制
器将用户输入的按键信息通过
RMII
接口输入 FPGA;
FPGA
将
ARM
控制器中的按键信息和调
试网口中的调试信息传输到保护装置管理机; 保 护装置管理机输出的液晶显示信息和点灯信息经
FPGA
传输给
ARM
控制器,
ARM
控制器解析显 示信息,刷新液晶屏并点亮 LED
指示灯
。
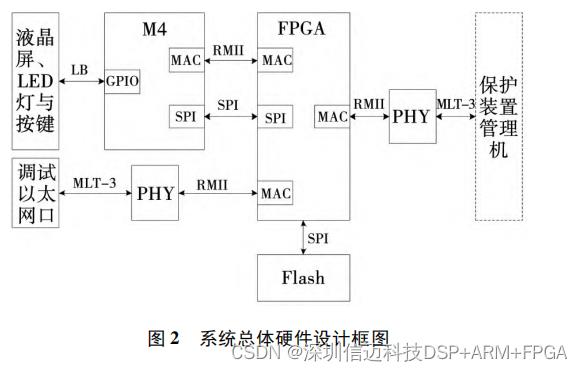
2 系统设计
系统采用兆易创新的基于
ARM
架构的
Cor- tex-M4 系列芯片
GD32F450ZI
作为控制器,完成
用户输入信息的采集与液晶屏画面显示; 同时采 用紫光同创的 PGL12G-6ILPG144
芯片作为百兆
以太网的交换芯片,模拟百兆以太网信息的交换 功能,实现人机交互信息、
用户调试信息和装置内 部信息的数据交换。
智能人机交互系统对外提供 液晶屏、LED 灯和按键,供用户进行人机交互; 并 且提供一个调试网口,供调试人员进行装置调试; 对装置内部提供一个以太网接口,供保护装置输 入液晶显示信息、
点灯信息和装置内部信息
。
系 统总体硬件设计如图 2
所示
。
系统主要包括以下功能:
①
数据交换功能:
FPGA
提供三个百兆以太 网接口,分别连接 ARM
处理器
、
调试网口和保护
装置,对人机交互信息
、
用户调试信息和装置内部 信息进行交互。
②
人机交互功能:
ARM
处理器驱动液晶屏, 显示保护装置输出的信息,同时接收液晶屏和按 键输入的用户信息,发送给 FPGA
。
③
程序存储与加载功能:
FPGA
的位流存储 在外部 Flash
中,在上电过程中,
FPGA
会主动通 过 SPI
接口从外部
Flash
中读取位流
。
程序加载 完成,FPGA 开始进行数据交换
。
1. 2 工作原理
智能人机交互系统整体采用液晶屏
+ ARM 控制器 + FPGA
的方案,
ARM
控制器与液晶屏
、
按键和
LED
灯组成人机交互界面,提供保护装置 操作界面并接受用户的按键信息输入; ARM
控制
器将用户输入的按键信息通过
RMII
接口输入 FPGA;
FPGA
将
ARM
控制器中的按键信息和调
试网口中的调试信息传输到保护装置管理机; 保 护装置管理机输出的液晶显示信息和点灯信息经
FPGA
传输给
ARM
控制器,
ARM
控制器解析显 示信息,刷新液晶屏并点亮 LED
指示灯
。
2 系统设计
系统采用兆易创新的基于
ARM
架构的
Cor- tex-M4 系列芯片
GD32F450ZI
作为控制器,完成
用户输入信息的采集与液晶屏画面显示; 同时采 用紫光同创的 PGL12G-6ILPG144
芯片作为百兆
以太网的交换芯片,模拟百兆以太网信息的交换 功能,实现人机交互信息、
用户调试信息和装置内 部信息的数据交换。
智能人机交互系统对外提供 液晶屏、LED 灯和按键,供用户进行人机交互; 并 且提供一个调试网口,供调试人员进行装置调试; 对装置内部提供一个以太网接口,供保护装置输 入液晶显示信息、
点灯信息和装置内部信息
。
系 统总体硬件设计如图 2
所示
。
rk3399pro 简介
rk3399pro是 瑞星微新出来的带NPU的ARM芯片,在发布之前,NPU的算力2.4TOPS, 而发现之后实测达到了3.0TOPS,如此强大的计算能力,jetson nano的计算能力是0.47TFlops,两个单位有区别,只能用实际的网络计算来比较二者的算力。

rk3399pro 算力测试
测试条件
硬件:TB-RK3399Pro 3GB内存+16GB闪存
toolkit 版本: toolkit 1.0.0
测试结果
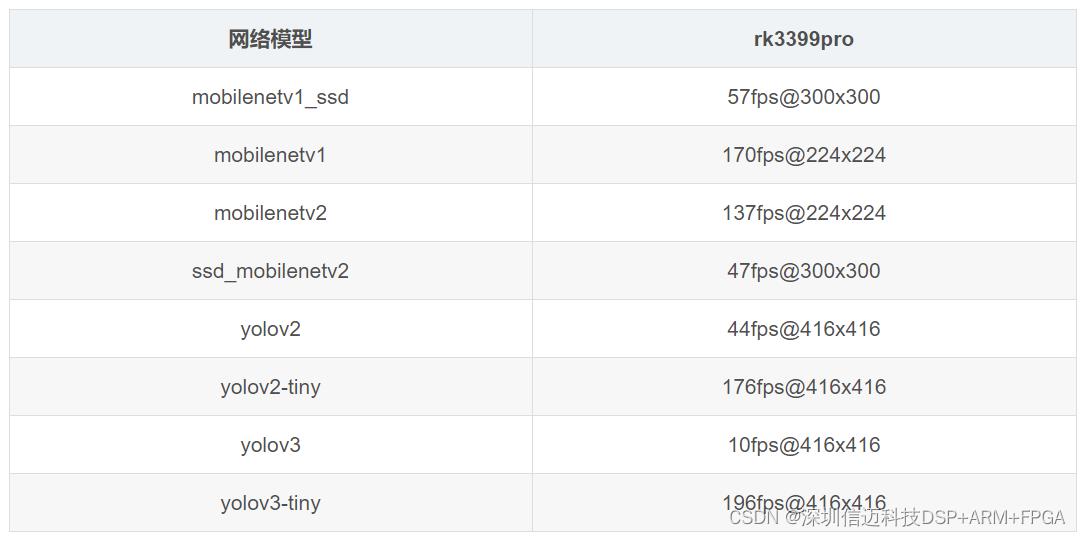
测试结论
yolov3 的表现非常奇怪,但是论坛里 toolkit 0.9能跑到30fps, 这才10fps,可能是官方的测试数据中,网络做了一些修改。
总体来说,rk3399pro的算力非常强大,比我预期的好很多,在不大修改网络的情况下,是可以直接拿来用的,但是缺点也是这个,对一些自定义的网络层,可能无法转换,需要等更新的版本出现。
以上是关于基于国产 ARM + FPGA+Codesys运动控制平台的智能人机交互系统设计的主要内容,如果未能解决你的问题,请参考以下文章
基于 ARM + FPGA 的 EtherCAT 主站设计及实现
国产FPGA Ethercat从站实时低成本运动控制系统方案