carla仿真模拟 下载安装运行教程
Posted new&new
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了carla仿真模拟 下载安装运行教程相关的知识,希望对你有一定的参考价值。
一、下载carla的 Windows 压缩包
https://github.com/carla-simulator/carla/releases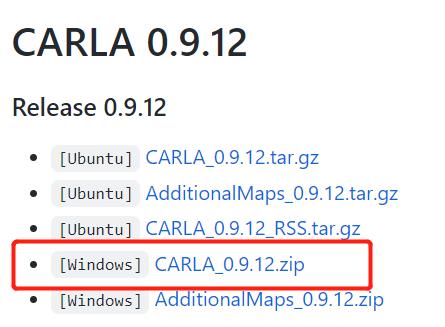
小编下载的是 windows 0.9.12.zip版本
因为0.9.13.zip版本小编在下载的时候出现了以下问题:
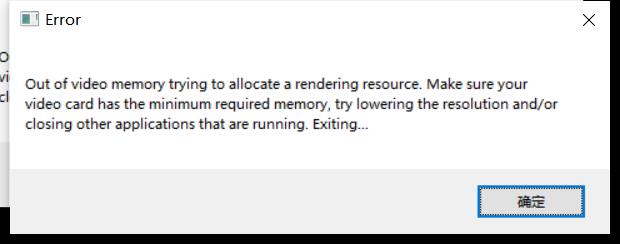
在carla论坛发现有博主也有一样的问题,但他说改用其他低版本,就不会出现这个问题了(或者你们可以尝试清理一下自己的C/D盘的存储)
下载完成之后是这样一个图:
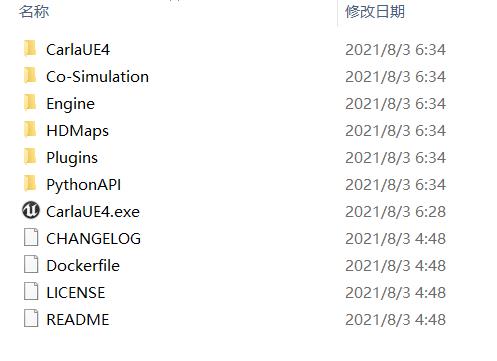
下载成功之后先不要动,也不要运行任何有关该上面的程序(因为其他配置软件你还没下载)
二、安装python
一定注意注意看自己对应carla所需的版本号
点开压缩包>>WindowsNoEditor>>PythonAPI>>carla>>dist
就能看见自己对应的carla所需配置的python版本
我的版本是:python3.7版本(carla-0.9.12-py3.7-win-amd64)
去官网下载自己所需的版本即可
https://www.python.org/downloads/
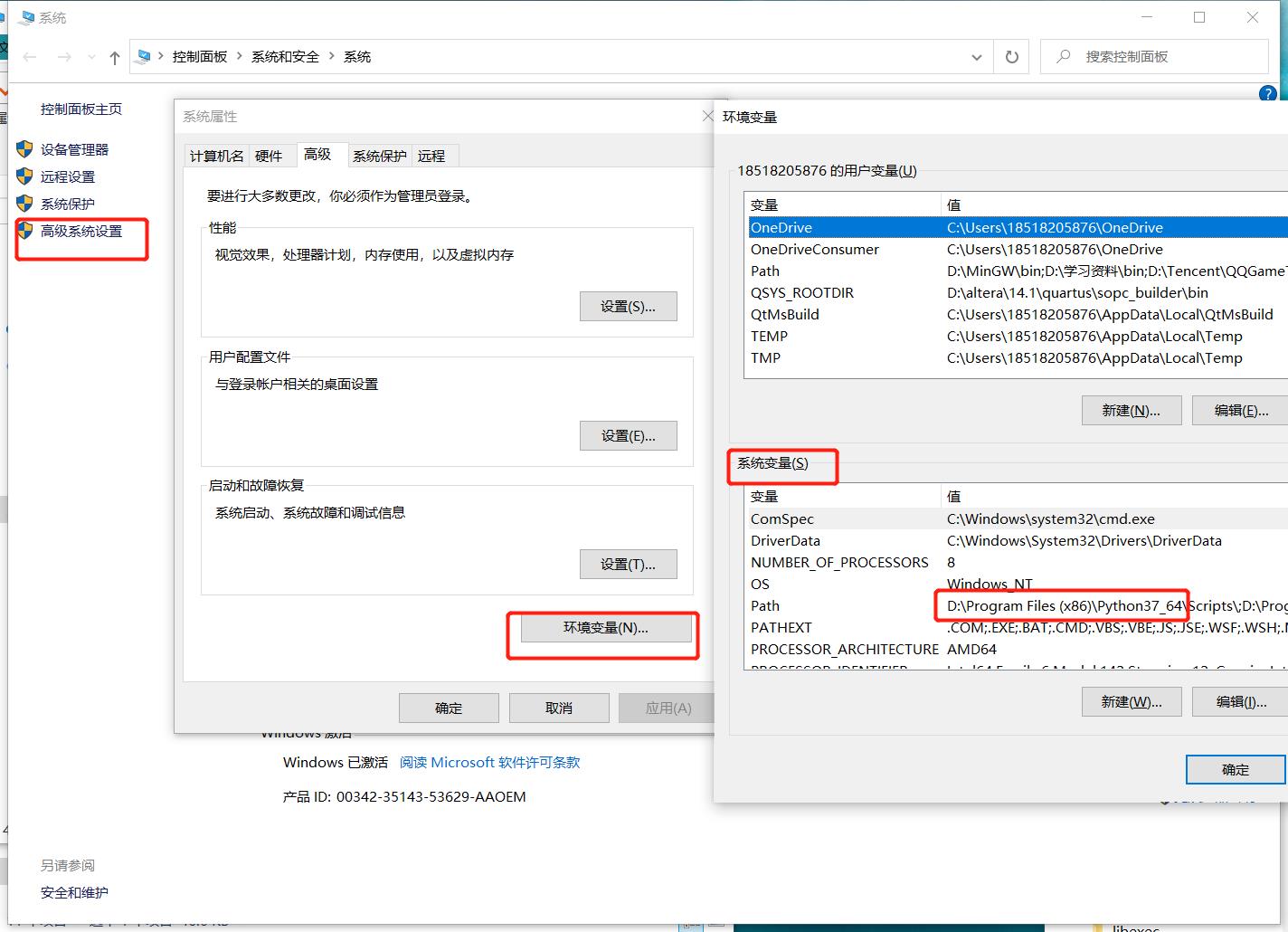
一定记得将所需要的python的安装路径记住,要将python位置放入计算机的环境变量中
三、安装pygame
注意:小编用的输入命令是在这里输入cmd

在命令行中输入一下命令:
注意:命令行一定要以管理员身份打开,否则执行下面命令报错。
py -m pip install -U pygame -user
或python -m pip install -U pygame --user安装之后,测试一下是否成功,输入一下命令:
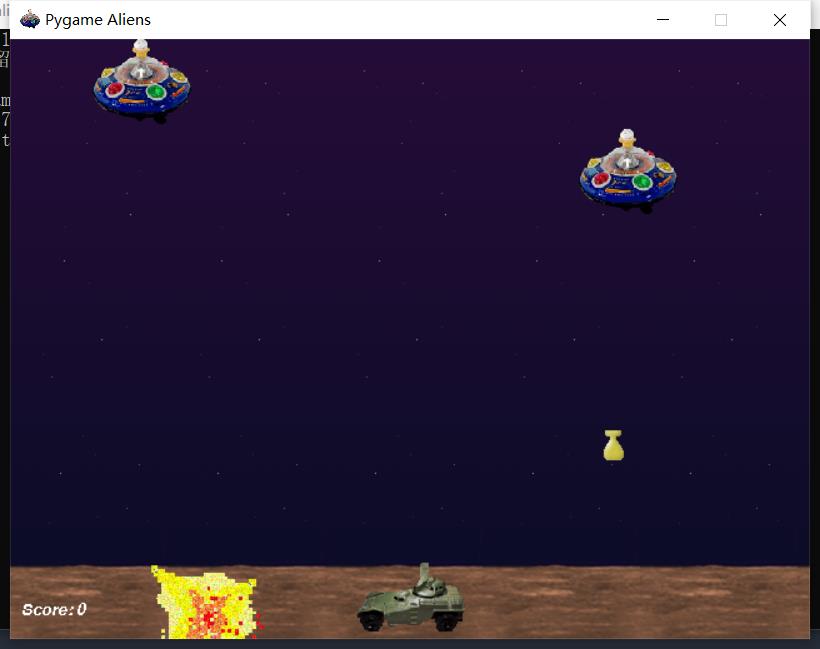
python -m pygame.examples.aliens
或:py -m pygame.examples.aliens执行上面的命令有可能会报错,提示你更新pip,按照命令提示更新pip即可
更新命令如下:
py -m pip install --upgrade pip
或:python -m pip install --upgrade pip安装成功显示游戏界面:
四、安装numpy
在命令行中输入以下命令:
注意:命令行一定要以管理员身份打开,否则执行下面命令报错。
python -m pip install numpy若提示你更新,按照提示命令更新即可
五、安装future
在命令行中输入一下命令:
注意:命令行一定要以管理员身份打开,否则执行下面命令报错。
python -m pip install future六、安装unreal Engine
先安装Epic Games Launcher
注意:这里要先注册才能下载

下载完成后的图标
下载完成之后进入这个APP,点击安装unreal Engine
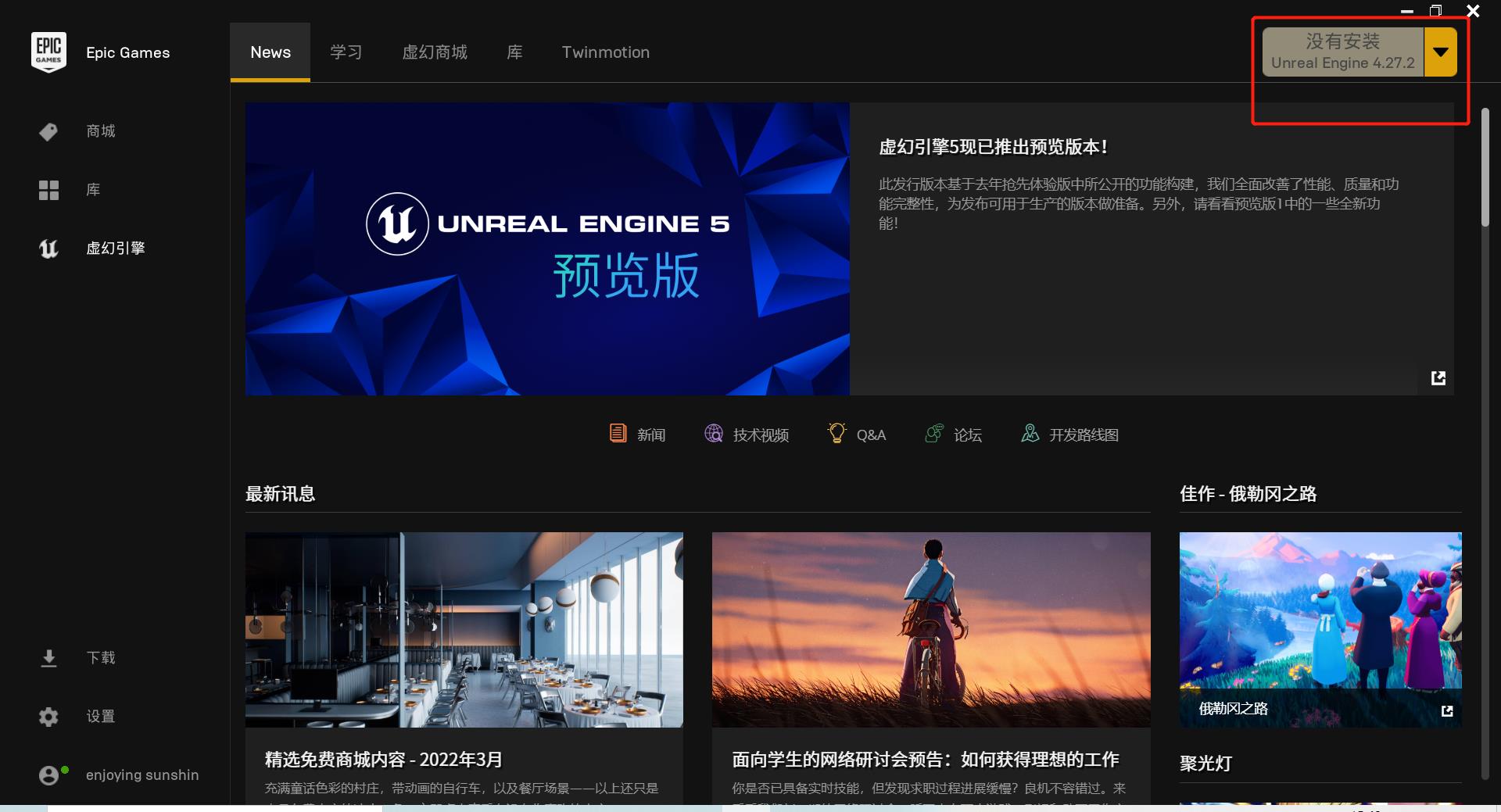
安装时间可能有点久,而且占内存较大
运行
点击carla压缩包>>WindowsNoEditor>>CarlaUE4.exe即可看到以下环境
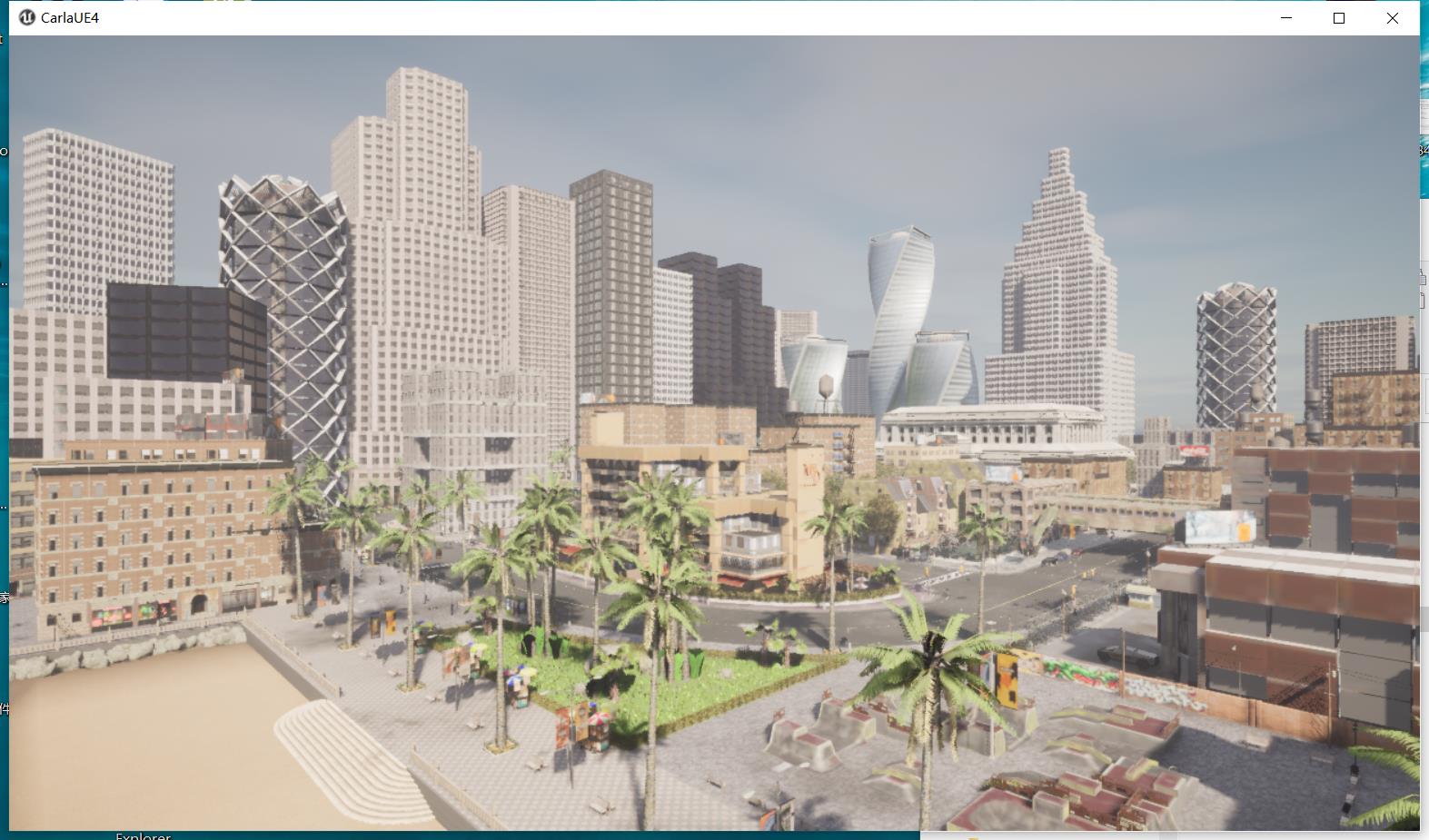
按Q、W、E、A、S、D键控制前后左右上下(顺序不对应)
之后进入WindowsNoEditor\\PythonAPI\\examples,在文件路径框内输入cmd进入控制台
运行如下代码,即可控制车在环境中运行
python manual_control.py
好了,接下来你就可以巡行以下其他examples中的例子了(比如 dynamic_weather.py,generate_traffic.py),但是有些例子还是不能运行,小编正在想办法解决
谢谢各位观看,并提出意见!
自动驾驶 7-1 Carla 概述 - 自动驾驶汽车模拟Carla Overview - Self-Driving Car Simulation













欢迎来到我们自动驾驶专业的第一门课程的最后一个章节。 在本节中,您将有机会整合应用 在课程中我们讨论的概念
并且在仿真平台中测试他们。 我们将首先讨论不同的自动驾驶汽车的仿真环境。 然后我会向你们展示会在 本课程及整个专题中使用的主题。
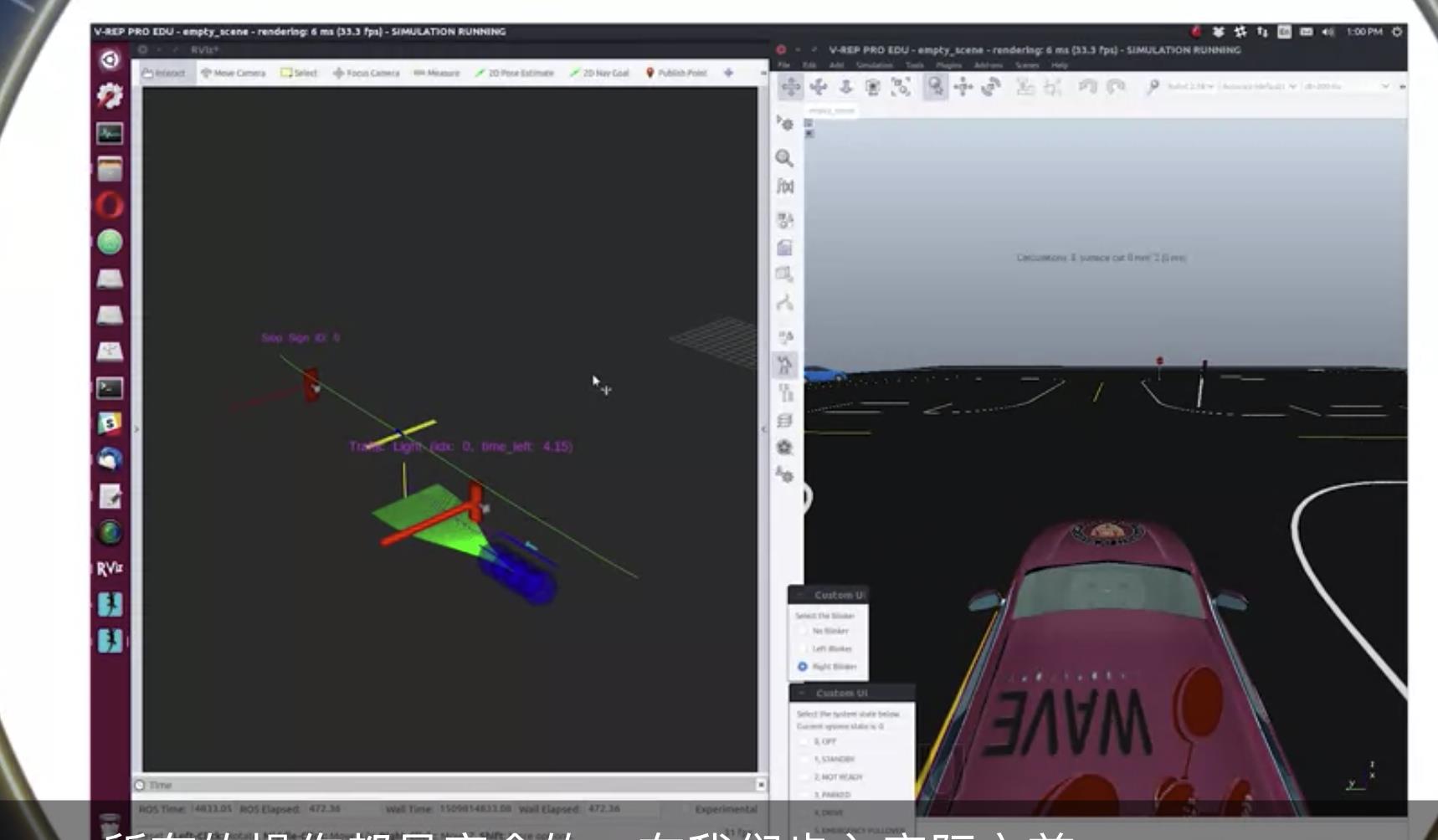
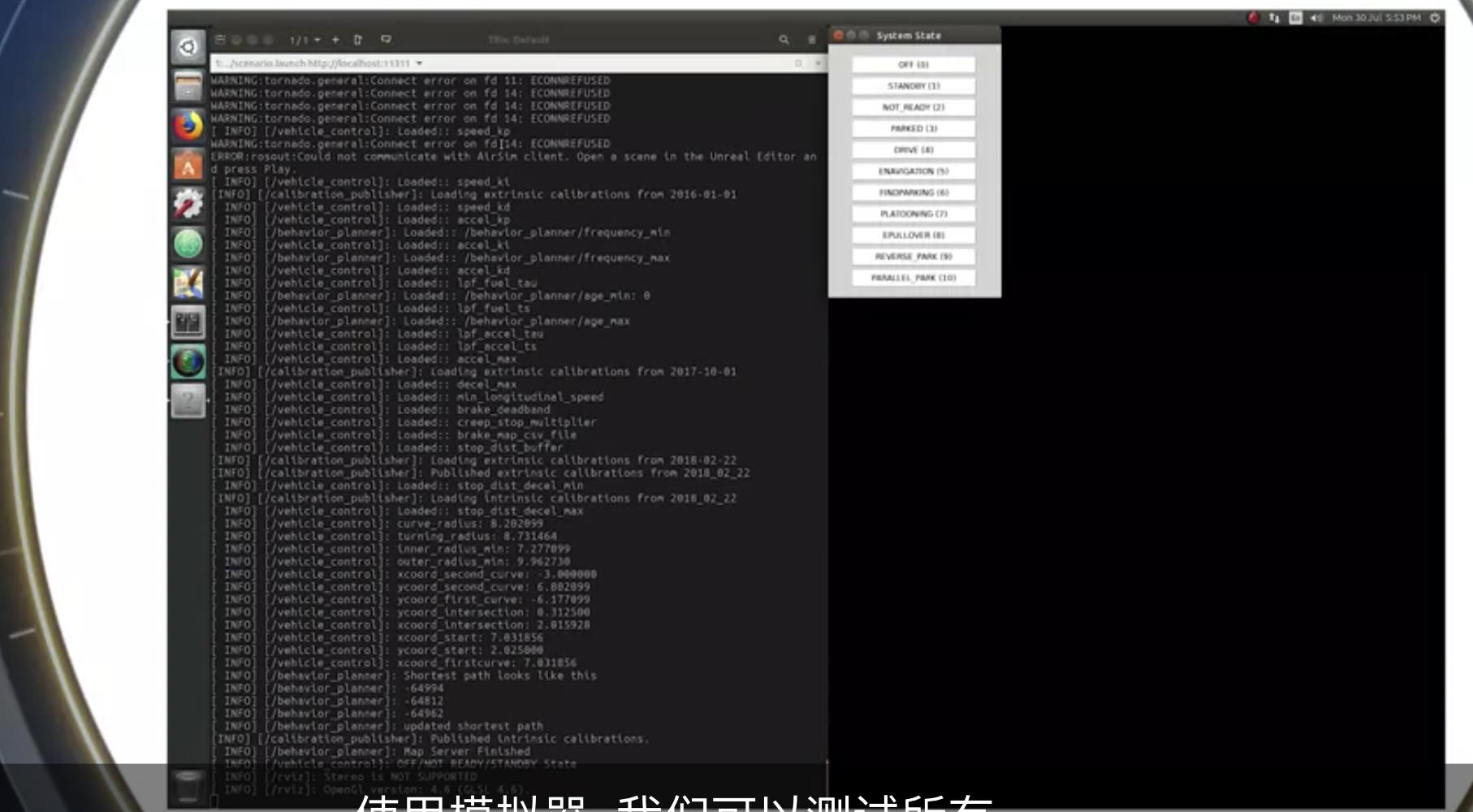
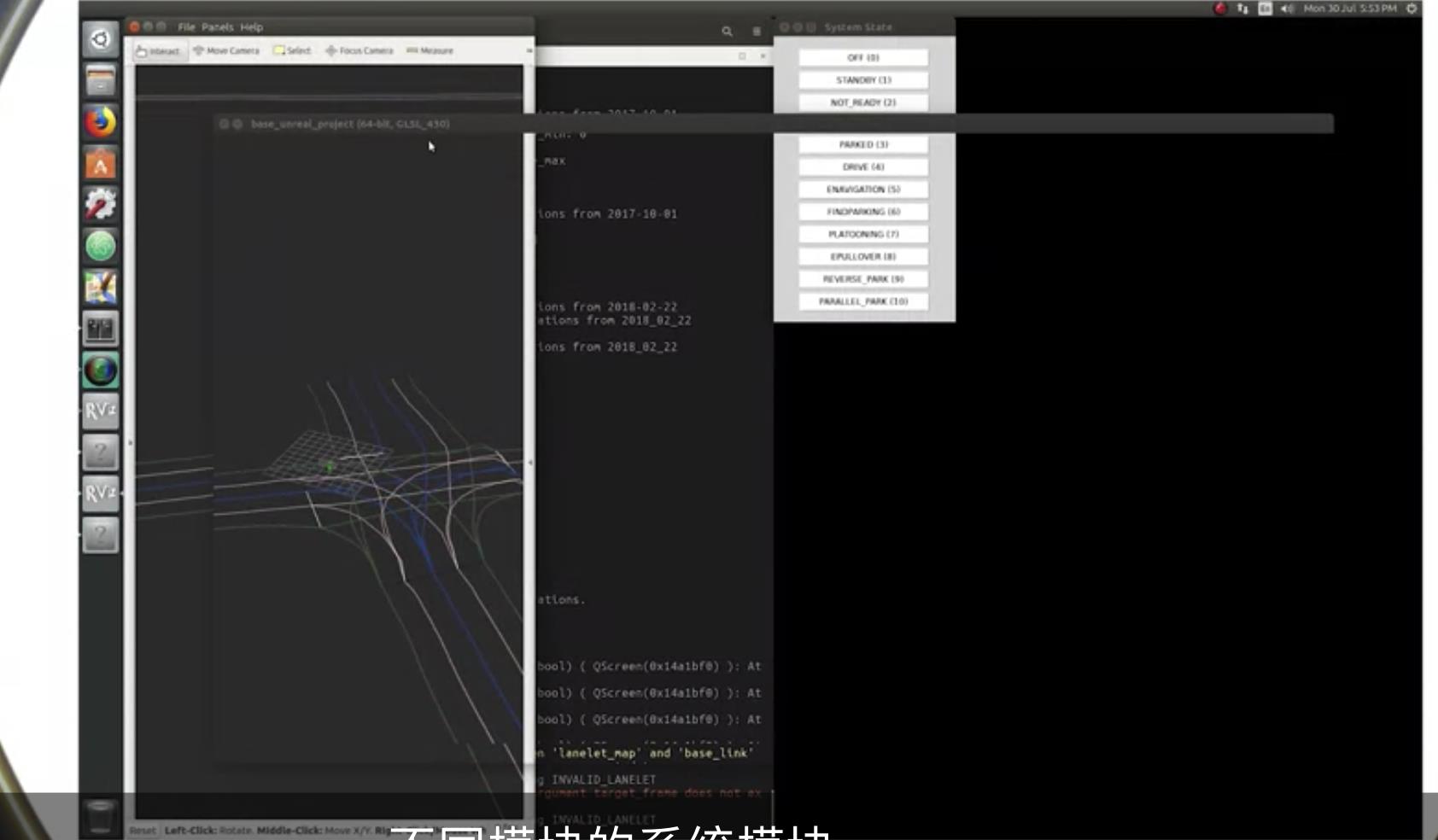
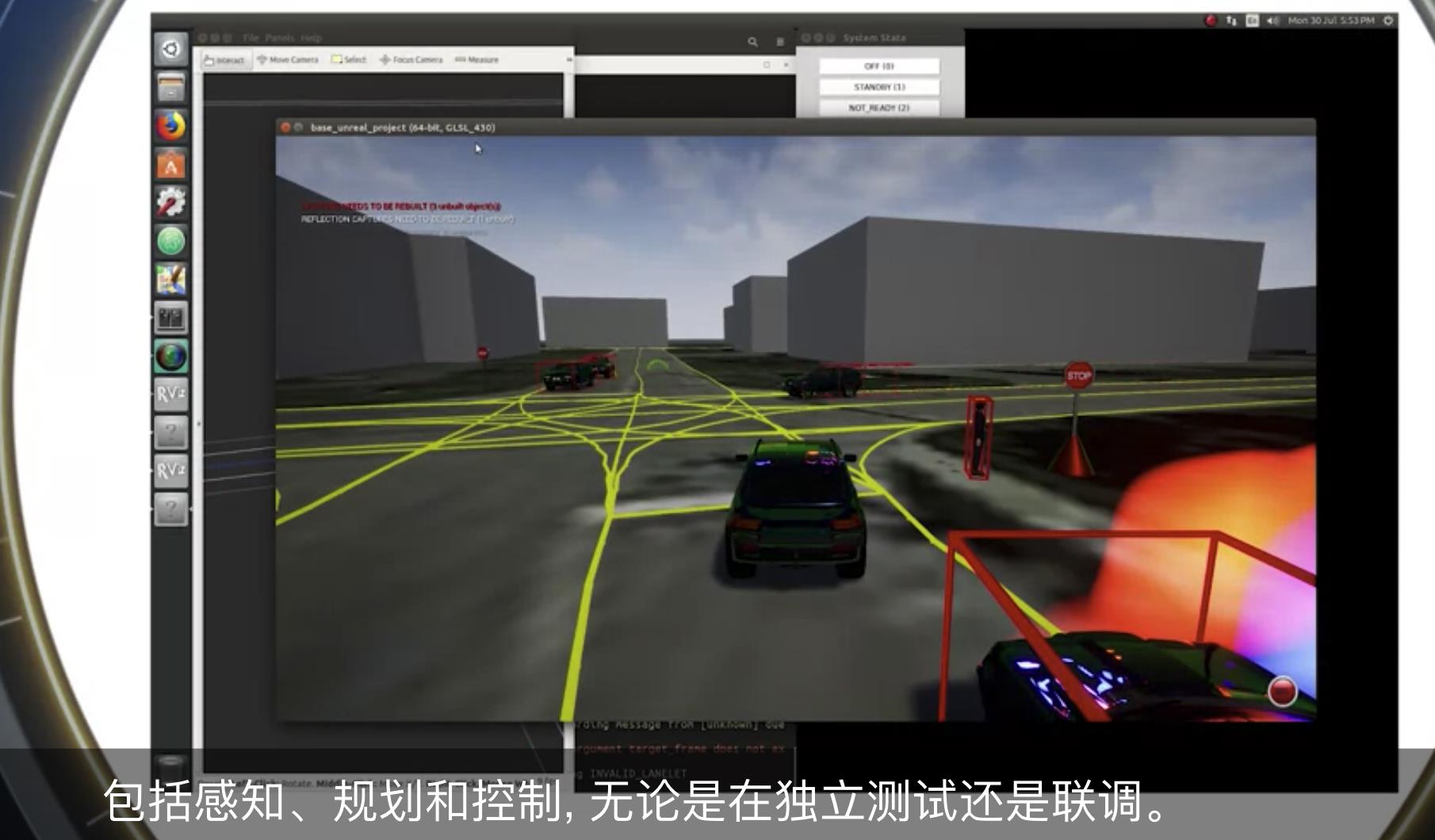
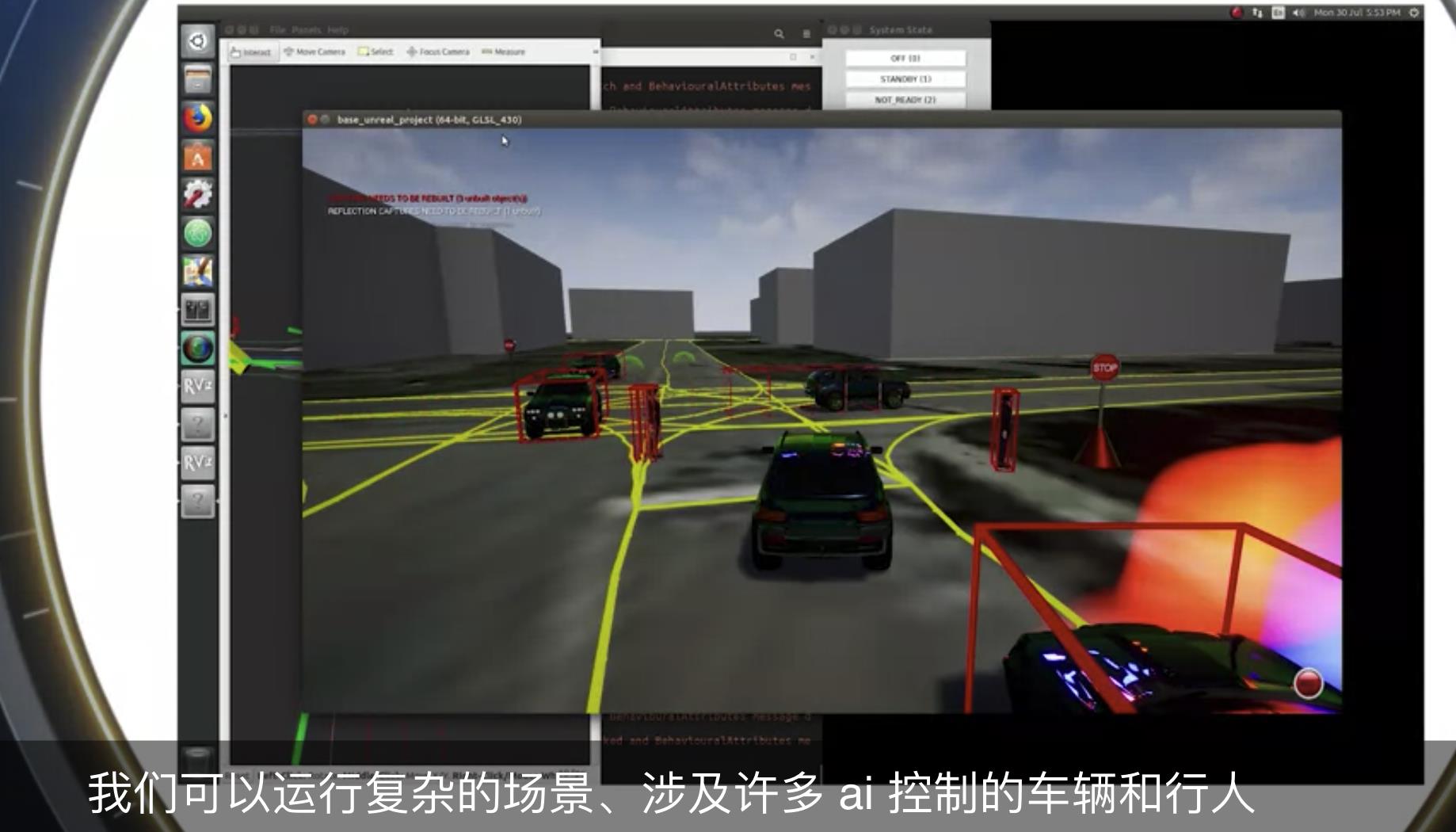
一个模拟的模拟环境是 开发汽车的重要工具。 因为它可以让我们确保 所有的操作都是安全的,在我们步入之前。 使用导致,我们可以测试所有 不同模块的系统模块 包括联系、规划还是控制、调整是在独立测试。 我们可以运行复杂的场景、
涉及许多人工智能控制的车辆和行人 我们可以让这些场景发生变化 上百次抗议次 以确保我们的汽车总是做出正确的决定。 最重要的是,我们可以测试我们的车 在实际道路上测试太危险的情况。 还有粉丝的选择 由来自业界和学术界的团队开发。
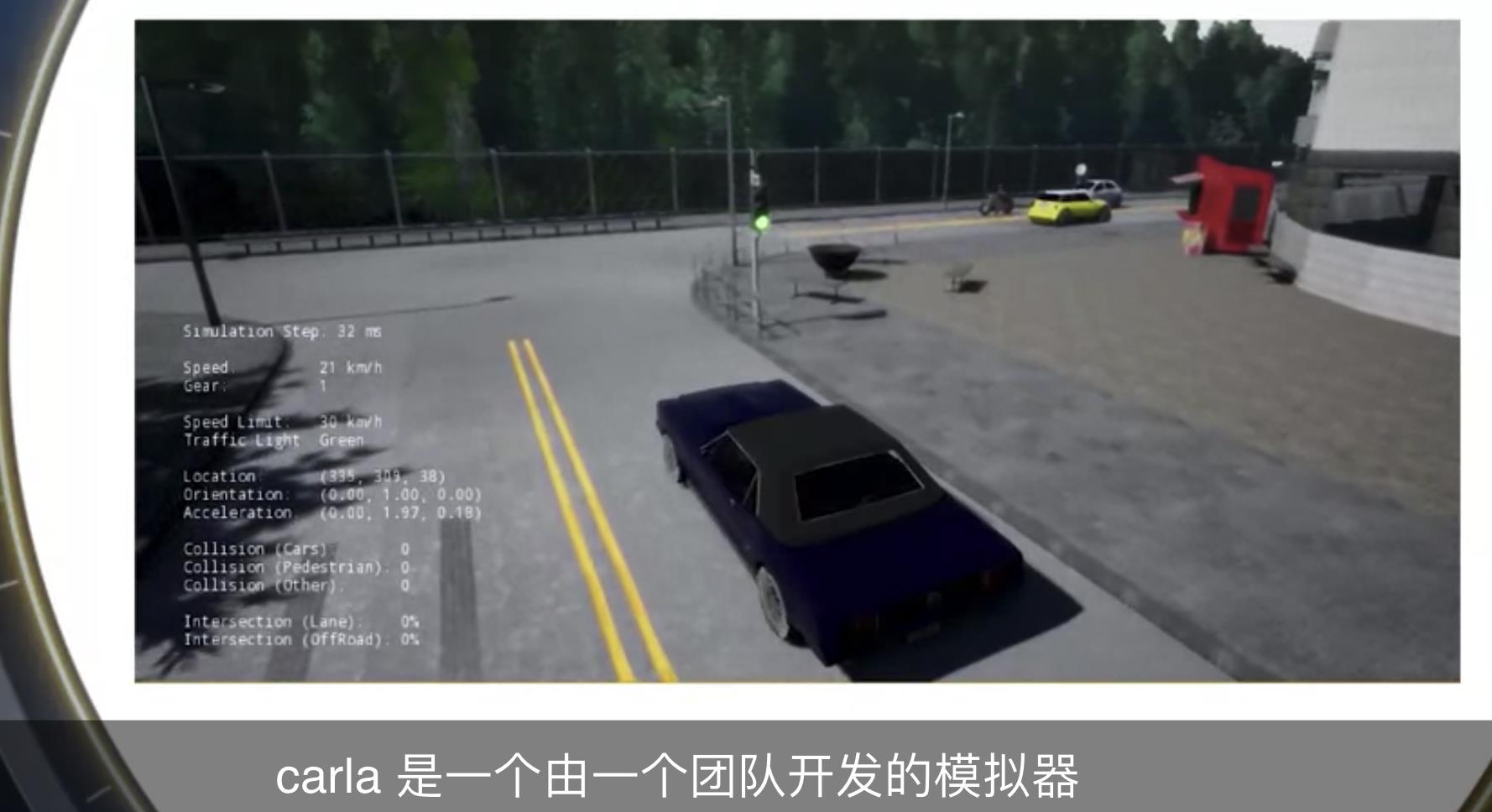
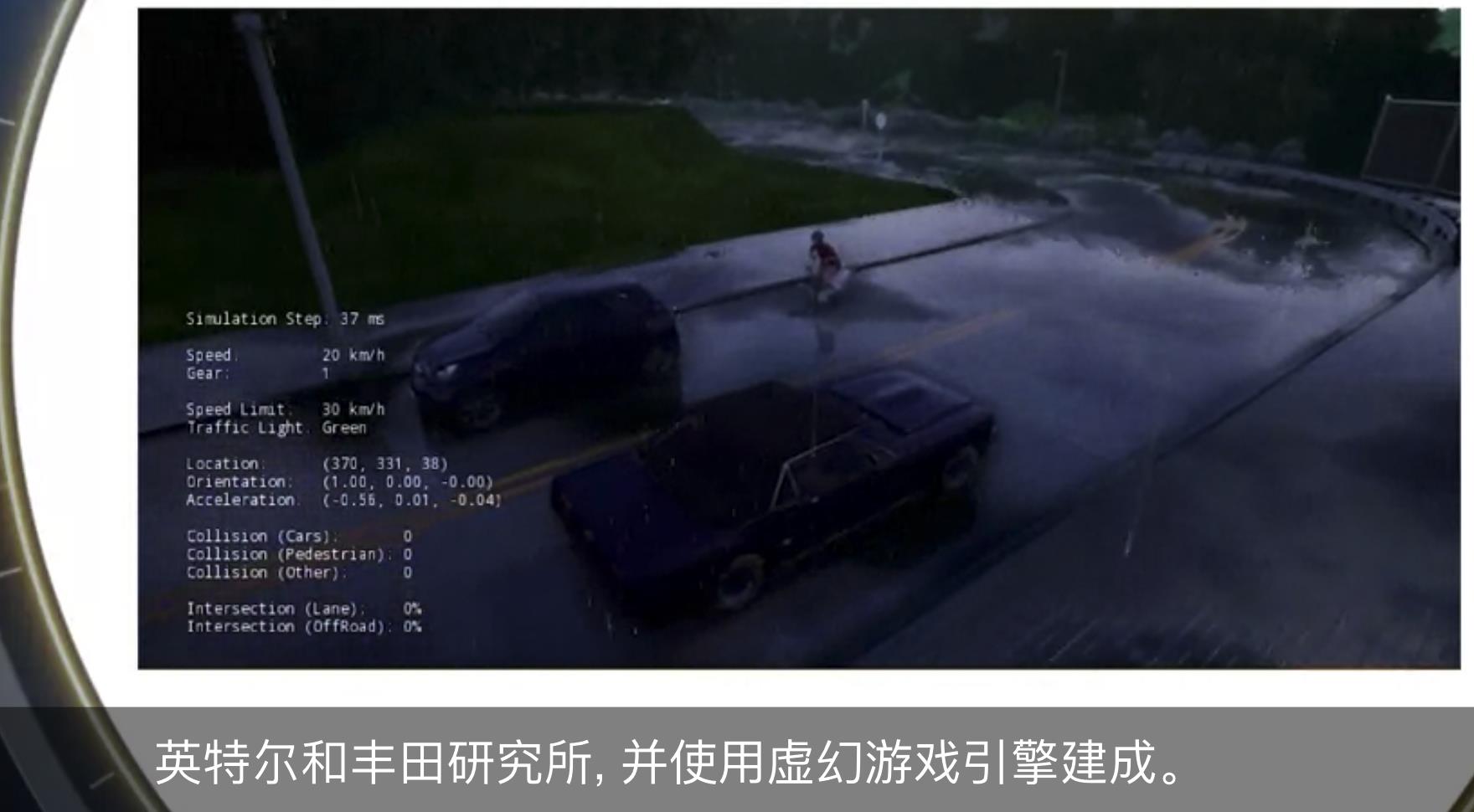
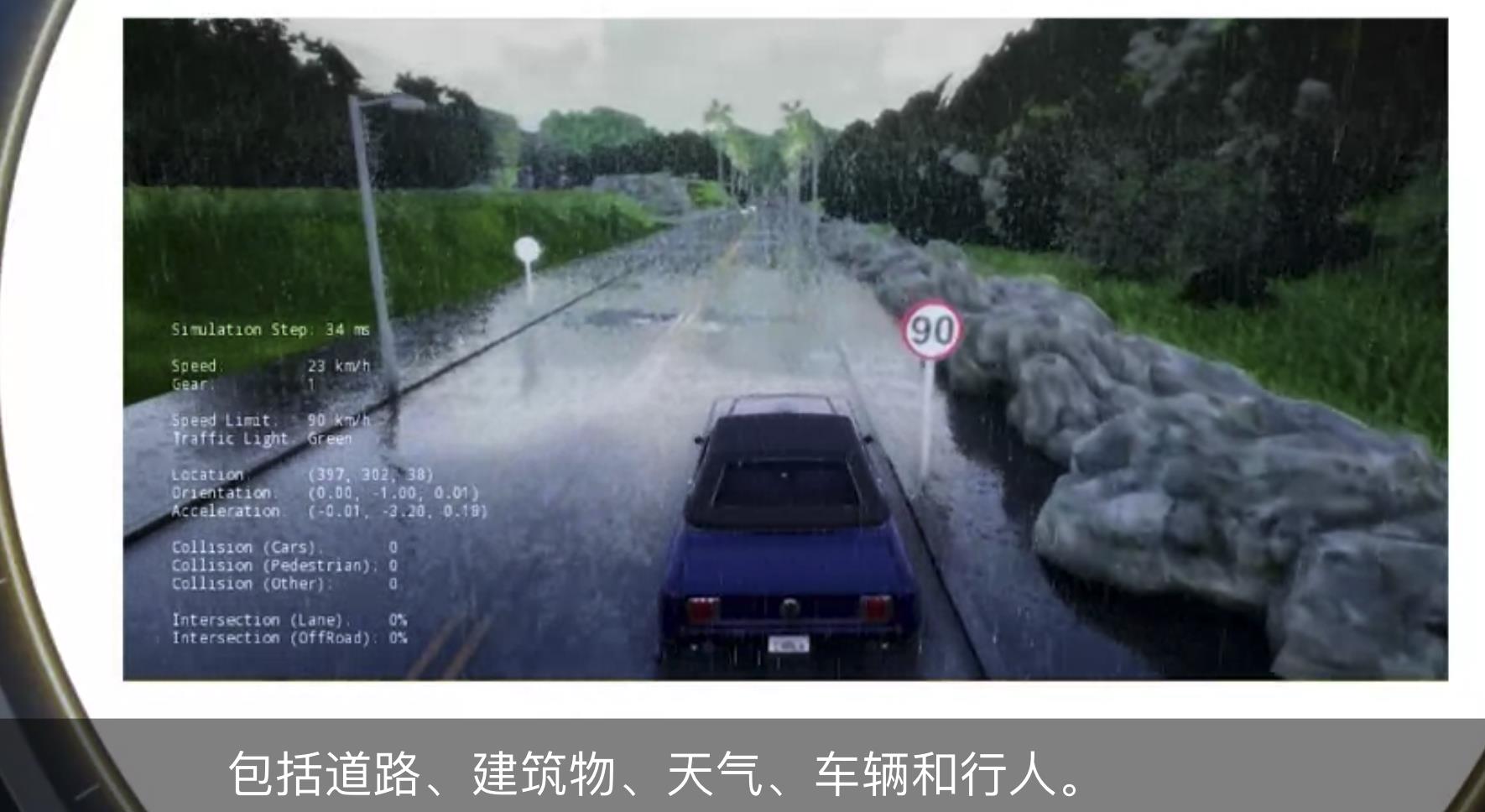
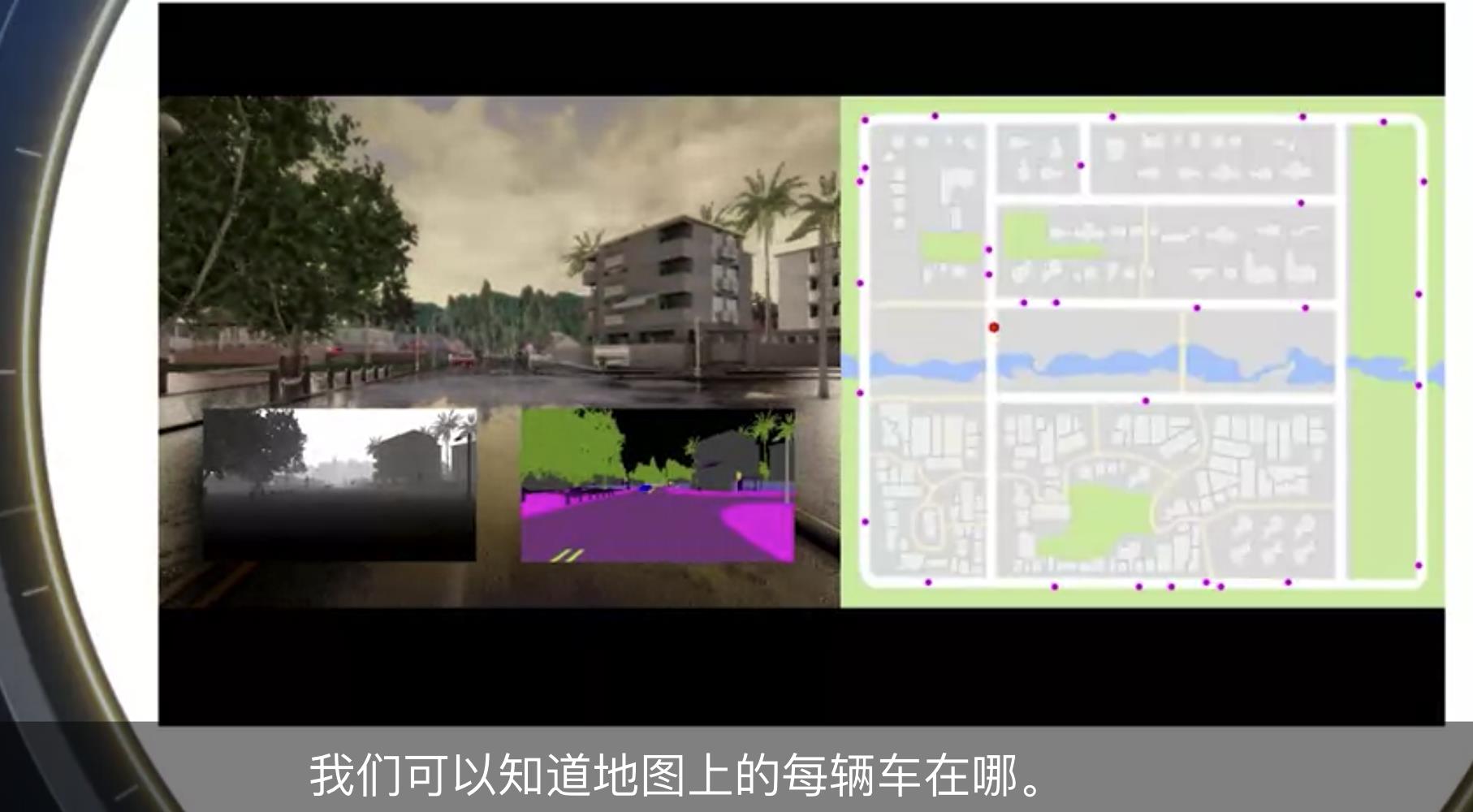
在本课程中,我们使用名为 carla 的将。 carla 是一个由一个团队开发的原因 其成员来自自主大学计算机视觉中心 使用和丰田研究所,并虚幻游戏引擎建成。 它具有非常详细的虚拟世界 包括道路、建筑、天气、车辆和行人。 这些环境的图像可以存储为多种格式 包括深度地图和分割图像。 你将在这个特定的第三个课程中学习这些。 整个仿真可以通过一个外部客户端实现 它可用于向车辆发出命令 记录数据和自动执行 评估你的车的表现 最重要的是 carla 是开源的。 所以,任何人都可以自由地修改代码 满足其特定的仿真要求。
我们开发了一个 carla 的定制版本。 提供一些额外的工具来帮助您实现和测试您的代码和仿真。 让我们来看看如何与干扰和使用不同。 不担心遇到的问题。 将有一个关于如何设置 carla 的详细指南 运行在python客户端上的识别指南 我们已经下载并安装了所有内容。 所以,让我们直接进入仿真平台。 启动 carla 的最简单方法是使用提供的启动脚本。 脚本用于加载 carla 以及我们选择的地图或场景。 在这里,我选择卡拉中提供的城镇环境
为我们提供的演示。 我们还可以更改会话的各种配置, 如模拟画面大小和 将固定时间步长设置为小或大。 carla 会话也可以在服务器模式下加载。 这允许客户端连接到服务器 并发出命令来控制汽车 或接收有关仿真环境的信息。 为我们的编程提供了自己的选择。
从结果的得到的反馈 我们可以知道地图上的每一个人在哪。 开发一个控制器和规划器
以顺利地导航我们的汽车 甚至可以使用深度和行图像来学习检测汽车和人。 来自客户端的仿真结果也可以经过处理 来评估我们当前软件算法和方法的性能。 它提供了一些有关的观点 以及智能和智能的限制。
为我们即将到来的课程项目 我们用这些结果来评估你的算法的性能 并鼓励探索和借鉴 以及您正在开发的算法的缺陷。 我们已经讨论了为什么模拟是个别的
以及你可以用什么东西 我们也见过carla了 一个我们将在整个课程中的用途。 我们还看到了一些carla的功能 这些将在即将到来的课程项目中使用。
现在,在我们讨论这个项目的细节之前 是时候让你仔细看看理由 并在您自己的计算机上进行配置。 现在是时候按照这些详细的说明 并带你完成整个过程。 如果你遇到任何问题
鼓励你参考论坛 可能有人和你有同样的问题。 阅读你的启动启动和运行了 轻松的启动和运行客户端 您就可以开始将其用于课程项目了。 在下一个视频中,我们将介绍最终的项目要求 并准备好开始为您的汽车汽车设计控制器
下一节再见
第 1 课补充阅读:Carla 概述 - 自动驾驶汽车模拟
补充阅读:Carla概览——自动驾驶汽车模拟
您可以阅读以下 PDF 中列出的有关 CARLA 及其原始论文的更多信息:
您还可以在此链接中找到原始源代码:https://github.com/carla-simulator/carla/
如果您有兴趣了解虚幻引擎,请查看此链接:https://www.unrealengine.com/en-US/features
参考
https://www.coursera.org/learn/intro-self-driving-cars/lecture/w7uE2/lesson-1-carla-overview-self-driving-car-simulation
以上是关于carla仿真模拟 下载安装运行教程的主要内容,如果未能解决你的问题,请参考以下文章
自动驾驶 7-1 Carla 概述 - 自动驾驶汽车模拟Carla Overview - Self-Driving Car Simulation