论文阅读(Lukas Neumann——ICCV2017Deep TextSpotter_An End-to-End Trainable Scene Text Localization and R
Posted lilicao
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了论文阅读(Lukas Neumann——ICCV2017Deep TextSpotter_An End-to-End Trainable Scene Text Localization and R相关的知识,希望对你有一定的参考价值。
Lukas Neumann——【ICCV2017】Deep TextSpotter_An End-to-End Trainable Scene Text Localization and Recognition Framework
目录
- 作者和相关链接
- 方法概括
- 方法细节
- 实验结果
- 总结与收获点
- 参考文献和链接
作者和相关链接
- 作者

方法概括
-
方法概述
- 该方法将文字检测和识别整合到一个端到端的网络中。检测使用YOLOv2+RPN,并利用双线性采样将文字区域统一为高度一致的变长特征序列,再使用RNN+CTC进行识别。
-
文章亮点
- 检测+识别在一个网络中端到端训练
- 速度很快(100ms/每张图,注意是检测+识别!)
-
主要流程

-
- 如上图,整个端到端识别分为四步:
-
检测:用去掉全连接层的YOLOv2框架进行fcn+RPN,得到候选文字区域
-
双线性采样(实际上是一个Spatial Transform module):将大小不同的文字区域统一特征映射为高度一致宽度变长的特征序列
- 识别:将特征序列用rnn得到概率矩阵(带recurrent的fcn),再接CTC得到识别字符串
-
最后利用识别的打分情况反过来对检测的boundingbox进行nms,得到精确的检测框
-
- 如上图,整个端到端识别分为四步:
方法细节
-
检测的FCN网络
-
使用YOLOv2的前18个convolution layer和5个max pool layer,去掉了最后的全连接层
-
最后输出的feature map是:W/32 * H/32 * 1024
-
-
Region Proposals
-
采用类似于RPN的anchor机制
-
回归参数5个,除了正常的RPN回归的x, y, w, h的相对值,还有角度ɵÎ[-pi/2, pi/2] (这个怎么加入loss?)
-
每个anchor点有14个anchor box,这14个anchor box的scale、aspects(angle范围怎么设?)通过在训练集上用k-means聚类得到
-
正负样本选择:IOU最大为正anchor box,其他均为负样本(合理吗?)
- NMS使用:利用识别结果对检测结果进行反馈调整(取识别分数大于阈值的所有框进行nms)
-
-
Bilinear Sampling
-
这步的目的
-
将前面detection得到的大小不同的region proposal对应的feature统一成固定高度的feature(为了输入到识别的CNN中,识别的CNN有recurrent network,需要固定高度,但宽度可以变长),并且保持特征不会形变太多;
-
- 这一步为什么不直接用Faster R-CNN中的ROI pooling?
- 答: 第一是因为ROI pooling实际上是固定网格,不论原proposal有多长,最后都会变成比如7*7的网格。而实际的text proposal,文字是变长的,固定网格有可能导致text被拉伸或压缩,造成大的形变;第二(更重要的是)是因为采用ROI pooling只是水平和竖直的grid,无法处理旋转或形变情况。
-
-
- Bilinear Sampling是什么?
- 文中用的bilinear sampling 是一个以bilinear interpolation kernel为核的Spatial Transformer。
- Bilinear Sampling是什么?
-
-
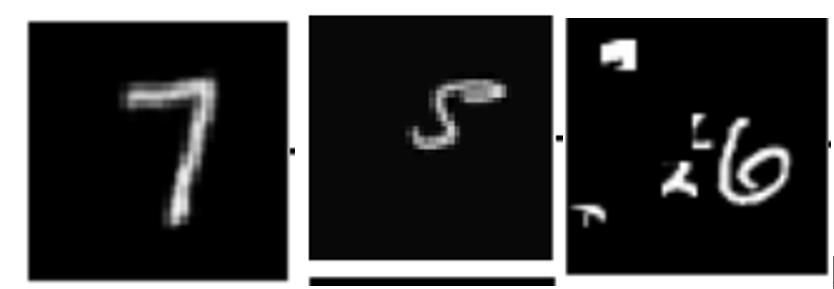
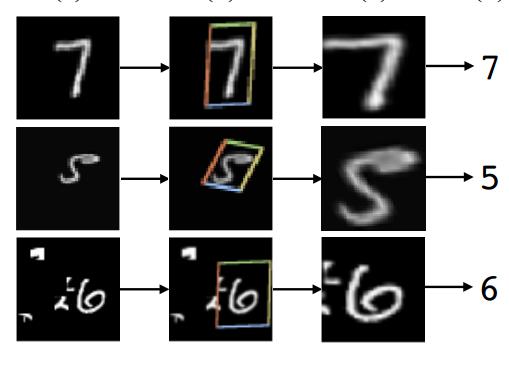
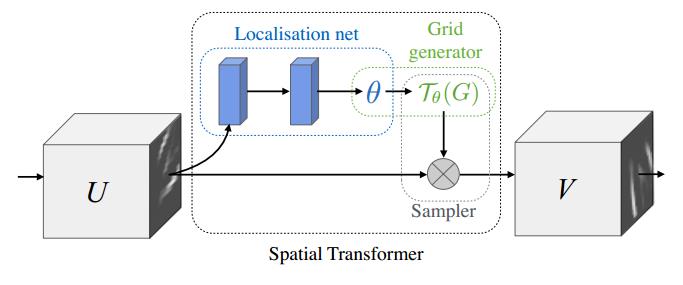
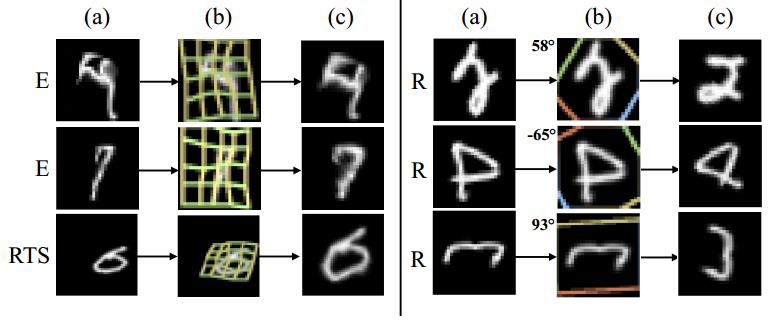
- 一个Spatial Transformer的结构分为三个部分,Localisation net,Grid generator,和Sampler。Localisation net负责学习一组参数(下一步生成网格要用的),其输入为原特征feature map(记为U),输出即参数ɵ。Grid generator负责给定参数ɵ时生成网格Tɵ(G)。最后的Sampler负责把网格Tɵ(G)打在原feature map上,生成最后transform之后的特征(记为V)。
-
-
-
- Spatial Transformer简单来说,实际上是用来做特征变换的,包括扭曲、旋转、平移、尺度变换,它的特点是这个变换的参数不是固定的,而是根据每个样本的不同自己学出来的。
-

-
-
- Bilinear Sampling特征映射公式如下:
-

-
-
-
- κ(v) = max(0, 1 - |v|)是一个bilinear sampling kernel,T即为学出来的网格,实际上是一个坐标变换(就是一个矩阵)。
- STN详见论文:Spatial Transformer Networks(参考文献1)
- Bilinear sampling kernel详见论文:Image Fusion Using LEP Filtering and Bilinear Interpolation(参考文献2)
-
-
-
识别
- 传统的变长word识别思路
- 一个超大类分类器(每一个单词就是一类)
- 多个二类分类器(每一个位置预测一下是哪一类,类数=字符的总类数,例如英文就是62类)
- 识别流程
- 识别FCN(带RNN的)+ CTC(Connectionist Temporal Classification)
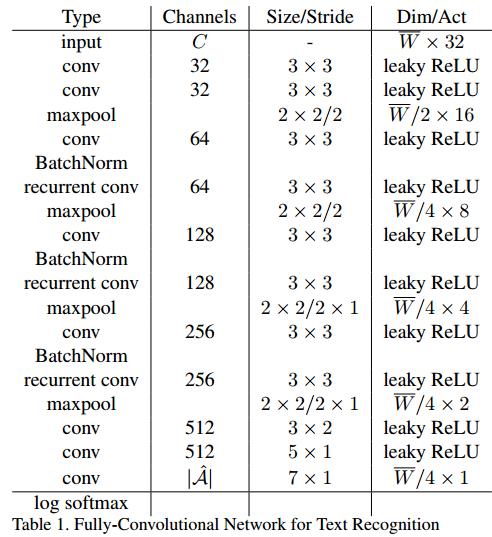
- 识别FCN
- 一堆conv + pool + recurrent conv + batch norm,最后接一个softmax
- 传统的变长word识别思路
-
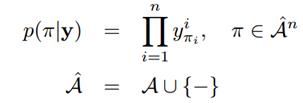
- CTC(Connectionist Temporal Classification)
- CTC的功能在于可以根据一个概率矩阵得到最可能的序列结果。这个输入的概率矩阵设为A(i, j),i Î[1, m],jÎ[1, n],m表示字符的类别总数(包括背景类,英文即为63类),是一个固定值,n与输入的图像长度相关(本文n=w/4)。A(i, j)可以理解为在水平位置i的滑窗里包含第j个字符的概率大小。输出的序列结果例如“text”等即为最终的识别结果。
- CTC(Connectionist Temporal Classification)

Figure 4. Text recognition using Connectionist Temporal Classification. Input W × 32 region (top), CTC output W 4 × |A| ˆ as the most probable class at given column (middle) and the resulting sequence (bottom)
-
-
- CTC操作首先去掉空格和重复的字符(即为化简),然后对化简之后得到同一个单词的串概率求和,最后取总概率最大的字符串即为最终的识别结果。
-



-
Training
-
检测和识别单独预训练,然后端到端再合起来训练
-
检测预训练:SynthText (80万),3epoch,ImageNet预训练模型
-
识别预训练:Synthetic Word(900万),3epoch,随机初始化N(0,1)
-
合起来训练:SynthText + Synthetic Word + ICDAR2013-train + ICDAR2015-train, 3epoch,每张图随机crop30%,momentum = 0.9,lr = 0.001,每个epoch将10倍
-
实验结果
- 速度说明
- Nvidia K80 GPU
- ICDAR2013:图像大小resize成544*544,100ms/每张图
- ICDAR2015:图像大小608*608,110ms/每张图
- ICDAR2013

- ICDAR2015

总结与收获
- 检测这边基本上是用yolov2,不一样的点在于:第一,加了角度信息;第二,anchor的选择是通过kmeans确定的,虽然有点trick,但感觉也挺有道理的,虽然作者没有验证这样做的generalization;
- 个人觉得文中最好的点是加入了spatial transform(文中叫bilinear sampling),虽然也不是作者提出的,但作者用在检测+识别中间是第一个,也很有意思。值得一提的是,stn的paper中说stn没有增加多少耗时;
- 识别这边像是自己设计的简化的网络,RNN+CTC是正常的识别方法;
- 端到端训练可以借鉴,先预训练检测+预训练识别+合起来训练。
参考文献
- M. Jaderberg, K. Simonyan, A. Zisserman, et al. Spatial transformer networks. In Advances in Neural Information Processing Systems, pages 2017–2025, 2015. 2, 3
- Raveendran H, Thomas D. Image Fusion Using LEP Filtering and Bilinear Interpolation. International Journal of Engineering Trends and Technology (IJETT) 2014, Volume 12 Number 9
以上是关于论文阅读(Lukas Neumann——ICCV2017Deep TextSpotter_An End-to-End Trainable Scene Text Localization and R的主要内容,如果未能解决你的问题,请参考以下文章
A computer hardware platform abstraction - part.2 - von neumann architecture