TLD算法原理2--学习理解之
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了TLD算法原理2--学习理解之相关的知识,希望对你有一定的参考价值。
TLD(Tracking-Learning-Detection)是一种新的单目标长时间(long term tracking)跟踪算法。该算法与传统跟踪算法的显著区别在于将传统的跟踪算法和传统的检测算法相结合来解决被跟踪目标在被跟踪过程中发生的形变、部分遮挡等问题。同时,通过一种改进的在线学习机制不断更新跟踪模块的“显著特征点”和检测模块的目标模型及相关参数,从而使得跟踪效果更加稳定、鲁棒、可靠。
对于长时间跟踪而言,一个关键的问题是:当目标重新出现在相机视野中时,系统应该能重新检测到它,并开始重新跟踪。但是,长时间跟踪过程中,被跟踪目标将不可避免的发生形状变化、光照条件变化、尺度变化、遮挡等情况。传统的跟踪算法,前端需要跟检测模块相互配合,当检测到被跟踪目标之后,就开始进入跟踪模块,而此后,检测模块就不会介入到跟踪过程中。但这种方法有一个致命的缺陷:即,当被跟踪目标存在形状变化或遮挡时,跟踪就很容易失败;因此,对于长时间跟踪,或者被跟踪目标存在形状变化情况下的跟踪,很多人采用检测的方法来代替跟踪。该方法虽然在某些情况下可以改进跟踪效果,但它需要一个离线的学习过程。即:在检测之前,需要挑选大量的被跟踪目标的样本来进行学习和训练。这也就意味着,训练样本要涵盖被跟踪目标可能发生的各种形变和各种尺度、姿态变化和光照变化的情况。换言之,利用检测的方法来达到长时间跟踪的目的,对于训练样本的选择至关重要,否则,跟踪的鲁棒性就难以保证。
考虑到单纯的跟踪或者单纯的检测算法都无法在长时间跟踪过程中达到理想的效果,所以,TLD方法就考虑将两者予以结合,并加入一种改进的在线学习机制,从而使得整体的目标跟踪更加稳定、有效。
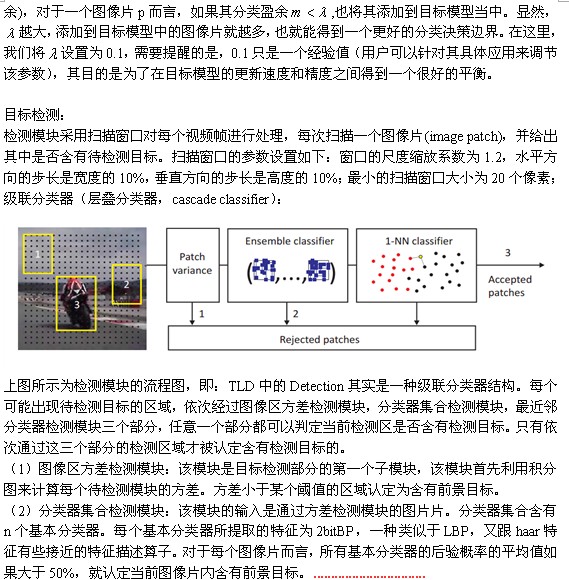
简单来说,TLD算法由三部分组成:跟踪模块、检测模块、学习模块;如下图所示
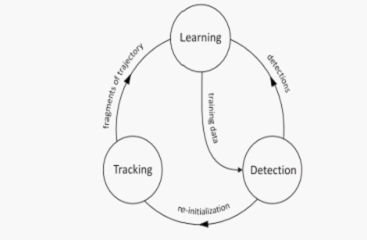
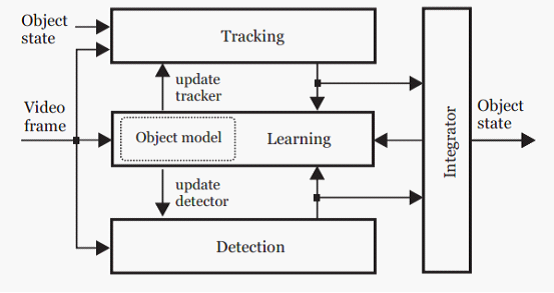
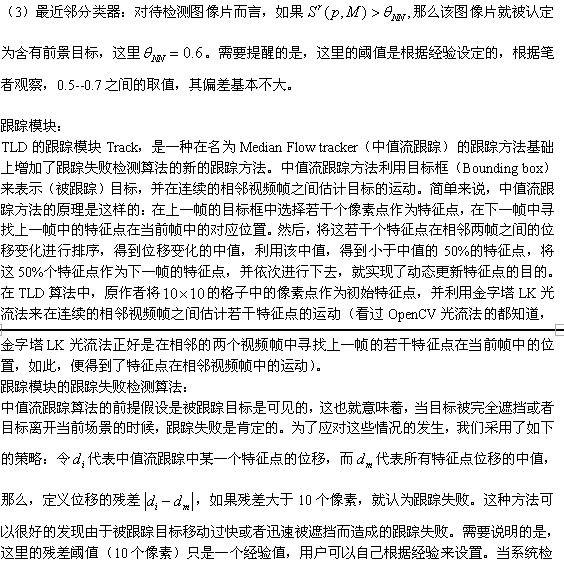
其运行机制为:检测模块和跟踪模块互补干涉的并行进行处理。首先,跟踪模块假设相邻视频帧之间物体的运动是有限的,且被跟踪目标是可见的,以此来估计目标的运动。如果目标在相机视野中消失,将造成跟踪失败。检测模块假设每一个视帧都是彼此独立的,并且根据以往检测和学习到的目标模型,对每一帧图片进行全图搜索以定位目标可能出现的区域。同其它目标检测方法一样,TLD中的检测模块也有可能出现错误,且错误无非是错误的负样例和错误的正样例这两种情况。而学习模块则根据跟踪模块的结果对检测模块的这两种错误进行评估,并根据评估结果生成训练样本对检测模块的目标模型进行更新,同时对跟踪模块的“关键特征点”进行更新,以此来避免以后出现类似的错误。TLD模块的详细;流程框图如下所示:
在详细介绍TLD的流程之前,有一些基本知识和基本概念需要予以澄清:
基本知识:
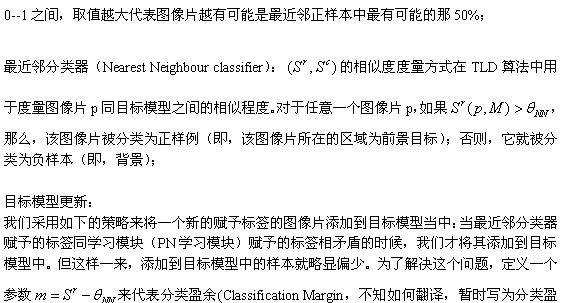
在任意时刻,被跟踪目标都可以用其状态属性来表示。该状态属性可以是一个表示目标所在位置、尺度大小的跟踪框,也可以是一个标识被跟踪目标是否可见的标记。两个跟踪框的空间域相似度是用重叠度(overlap)来度量,其计算方法是两个跟踪框的交集与两者并集的商。目标的形状采用图像片(image patch,个人认为,可以理解为滑动窗口)p来表示,每一个图像片都是从跟踪框内部采样得到的,并被归一化到15*15的大小。两个图相片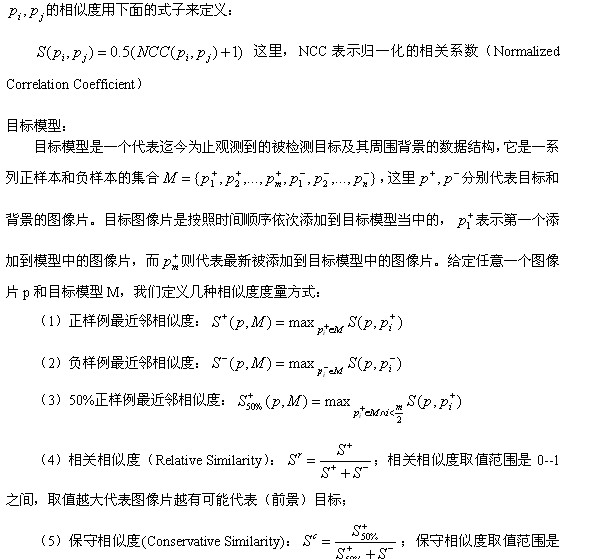
以上是关于TLD算法原理2--学习理解之的主要内容,如果未能解决你的问题,请参考以下文章
Java:Java学习笔记之ReentrantLock的简单理解和使用