如何获得物体的主要方向?
Posted GreenOpen专注图像处理
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了如何获得物体的主要方向?相关的知识,希望对你有一定的参考价值。
 采用pca分析方法,获得图像的中点和主要方向。
采用pca分析方法,获得图像的中点和主要方向。
问题来源为网友提供的资料,原文地址为:《Object Orientation, Principal Component Analysis & OpenCV》
问题描述:
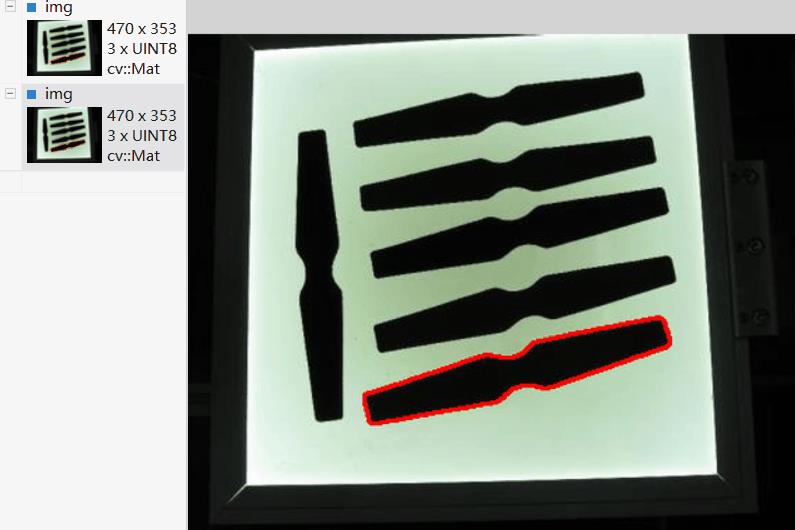
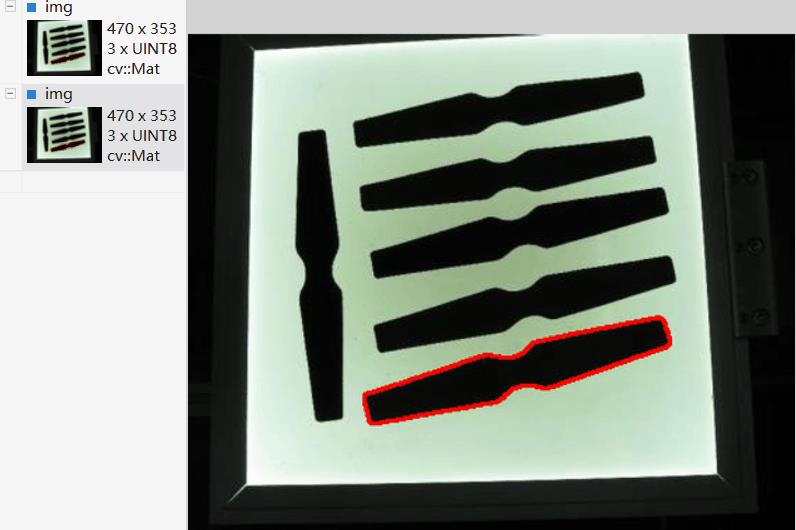
对于这样的图像(2副,采用了背投光),如何获得上面工件的主要方向


主要思路:
1、分别获得每个工件的轮廓;
2、处理每个轮廓,采用pca(主成分分析)方法,获得所有轮廓点的集合的中点,主要方向等信息;
3、绘图并返回结果。
注:pca相关函数请查看
代码略解:
1、读入图片,寻找轮廓;
//读入图像,转换为灰度
Mat img = imread("e:/sandbox/pca1.jpg");
Mat bw;
cvtColor(img, bw, COLOR_BGR2GRAY);
//阈值处理
threshold(bw, bw, 150, 255, CV_THRESH_BINARY);
//寻找轮廓
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(bw, contours, hierarchy, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);
Mat img = imread("e:/sandbox/pca1.jpg");
Mat bw;
cvtColor(img, bw, COLOR_BGR2GRAY);
//阈值处理
threshold(bw, bw, 150, 255, CV_THRESH_BINARY);
//寻找轮廓
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(bw, contours, hierarchy, CV_RETR_LIST, CV_CHAIN_APPROX_NONE);
2、首先以大小筛选轮廓;
//轮廓分析,找到工件
for (size_t i = 0; i < contours.size(); ++i)
{
//计算轮廓大小
double area = contourArea(contours[i]);
//去除过小或者过大的轮廓区域(科学计数法表示)
if (area < 1e2 || 1e5 < area) continue;
//绘制轮廓
drawContours(img, contours, i, CV_RGB(255, 0, 0), 2, 8, hierarchy, 0);
//寻找每一个轮廓的方向
getOrientation(contours[i], img);
}
for (size_t i = 0; i < contours.size(); ++i)
{
//计算轮廓大小
double area = contourArea(contours[i]);
//去除过小或者过大的轮廓区域(科学计数法表示)
if (area < 1e2 || 1e5 < area) continue;
//绘制轮廓
drawContours(img, contours, i, CV_RGB(255, 0, 0), 2, 8, hierarchy, 0);
//寻找每一个轮廓的方向
getOrientation(contours[i], img);
}
3、单独处理每个轮廓,分析其主要方向,绘制结果
//获得构建的主要方向
double getOrientation(vector<Point> &pts, Mat &img)
{
//构建pca数据。这里做的是将轮廓点的x和y作为两个维压到data_pts中去。
Mat data_pts = Mat(pts.size(), 2, CV_64FC1);//使用mat来保存数据,也是为了后面pca处理需要
for (int i = 0; i < data_pts.rows; ++i)
{
data_pts.at<double>(i, 0) = pts[i].x;
data_pts.at<double>(i, 1) = pts[i].y;
}
//执行PCA分析
PCA pca_analysis(data_pts, Mat(), CV_PCA_DATA_AS_ROW);
//获得最主要分量,在本例中,对应的就是轮廓中点,也是图像中点
Point pos = Point(pca_analysis.mean.at<double>(0, 0),pca_analysis.mean.at<double>(0, 1));
//存储特征向量和特征值
vector<Point2d> eigen_vecs(2);
vector<double> eigen_val(2);
for (int i = 0; i < 2; ++i)
{
eigen_vecs[i] = Point2d(pca_analysis.eigenvectors.at<double>(i, 0),pca_analysis.eigenvectors.at<double>(i, 1));
eigen_val[i] = pca_analysis.eigenvalues.at<double>(i,0);//注意,这个地方原代码写错了
}
//在轮廓/图像中点绘制小圆
circle(img, pos, 3, CV_RGB(255, 0, 255), 2);
//计算出直线,在主要方向上绘制直线
line(img, pos, pos + 0.02 * Point(eigen_vecs[0].x * eigen_val[0], eigen_vecs[0].y * eigen_val[0]) , CV_RGB(255, 255, 0));
line(img, pos, pos + 0.02 * Point(eigen_vecs[1].x * eigen_val[1], eigen_vecs[1].y * eigen_val[1]) , CV_RGB(0, 255, 255));
//返回角度结果
return atan2(eigen_vecs[0].y, eigen_vecs[0].x);
}
double getOrientation(vector<Point> &pts, Mat &img)
{
//构建pca数据。这里做的是将轮廓点的x和y作为两个维压到data_pts中去。
Mat data_pts = Mat(pts.size(), 2, CV_64FC1);//使用mat来保存数据,也是为了后面pca处理需要
for (int i = 0; i < data_pts.rows; ++i)
{
data_pts.at<double>(i, 0) = pts[i].x;
data_pts.at<double>(i, 1) = pts[i].y;
}
//执行PCA分析
PCA pca_analysis(data_pts, Mat(), CV_PCA_DATA_AS_ROW);
//获得最主要分量,在本例中,对应的就是轮廓中点,也是图像中点
Point pos = Point(pca_analysis.mean.at<double>(0, 0),pca_analysis.mean.at<double>(0, 1));
//存储特征向量和特征值
vector<Point2d> eigen_vecs(2);
vector<double> eigen_val(2);
for (int i = 0; i < 2; ++i)
{
eigen_vecs[i] = Point2d(pca_analysis.eigenvectors.at<double>(i, 0),pca_analysis.eigenvectors.at<double>(i, 1));
eigen_val[i] = pca_analysis.eigenvalues.at<double>(i,0);//注意,这个地方原代码写错了
}
//在轮廓/图像中点绘制小圆
circle(img, pos, 3, CV_RGB(255, 0, 255), 2);
//计算出直线,在主要方向上绘制直线
line(img, pos, pos + 0.02 * Point(eigen_vecs[0].x * eigen_val[0], eigen_vecs[0].y * eigen_val[0]) , CV_RGB(255, 255, 0));
line(img, pos, pos + 0.02 * Point(eigen_vecs[1].x * eigen_val[1], eigen_vecs[1].y * eigen_val[1]) , CV_RGB(0, 255, 255));
//返回角度结果
return atan2(eigen_vecs[0].y, eigen_vecs[0].x);
}
结果展示:
感谢关注,希望有所帮助。
提供的这个gif录屏软件,非常好用。
以上是关于如何获得物体的主要方向?的主要内容,如果未能解决你的问题,请参考以下文章