第五章 线程并行
Posted 爨爨爨好
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了第五章 线程并行相关的知识,希望对你有一定的参考价值。
▶ 本章介绍了线程并行,并给出四个例子。长向量加法、波纹效果、点积和显示位图。
● 长向量加法(线程块并行 + 线程并行)
■ 有三个地方和上一章的单线程块并行不同,分别是 tid = threadIdx.x + blockIdx.x * blockDim.x; ; tid += blockDim.x * gridDim.x; ;以及 add <<< 128, 128 >>> (dev_a, dev_b, dev_c); 。
■ 同时使用线程块并行和线程并行,一次访问的下标范围是 gridDim.x(线程块范围) * blockDim.x(线程范围),因此使用 tid += blockDim.x * gridDim.x; 跳到下一次访问的对应位置上去。
1 #include <stdio.h> 2 #include "cuda_runtime.h" 3 #include "device_launch_parameters.h" 4 #include "D:\\Code\\CUDA\\book\\common\\book.h" 5 6 7 #define N (33 * 1024) 8 9 __global__ void add(int *a, int *b, int *c) 10 { 11 int tid = threadIdx.x + blockIdx.x * blockDim.x;// 与单线程块并行不同 12 while (tid < N) 13 { 14 c[tid] = a[tid] + b[tid]; 15 tid += blockDim.x * gridDim.x;// 与单线程块并行不同 16 } 17 return; 18 } 19 20 int main(void) 21 { 22 int *a, *b, *c; 23 int *dev_a, *dev_b, *dev_c; 24 25 // 申请内存和显存 26 a = (int*)malloc(N * sizeof(int)); 27 b = (int*)malloc(N * sizeof(int)); 28 c = (int*)malloc(N * sizeof(int)); 29 cudaMalloc((void**)&dev_a, N * sizeof(int)); 30 cudaMalloc((void**)&dev_b, N * sizeof(int)); 31 cudaMalloc((void**)&dev_c, N * sizeof(int)); 32 33 // 数组填充 34 for (int i = 0; i < N; i++) 35 { 36 a[i] = i; 37 b[i] = 2 * i; 38 } 39 40 // 将内存中的a和b拷贝给显存中的dev_a和dev_b 41 cudaMemcpy(dev_a, a, N * sizeof(int), cudaMemcpyHostToDevice); 42 cudaMemcpy(dev_b, b, N * sizeof(int), cudaMemcpyHostToDevice); 43 44 // 调用核函数 45 add <<< 128, 128 >>> (dev_a, dev_b, dev_c);// 与单线程块并行不同 46 47 // 将显存中的dev_c从显存拷贝回内存中的c 48 cudaMemcpy(c, dev_c, N * sizeof(int), cudaMemcpyDeviceToHost); 49 50 // 检验结果 51 bool success = true; 52 for (int i = 0; i < N; i++) 53 { 54 if ((a[i] + b[i]) != c[i]) 55 { 56 printf("Error at i==%d:\\n\\t%d + %d != %d\\n", i, a[i], b[i], c[i]); 57 success = false; 58 break; 59 } 60 } 61 if (success) 62 printf("We did it!\\n"); 63 64 // 释放内存和显存 65 free(a); 66 free(b); 67 free(c); 68 cudaFree(dev_a); 69 cudaFree(dev_b); 70 cudaFree(dev_c); 71 72 getchar(); 73 return 0; 74 }
● 波纹效果
■ 二维的坐标映射,将blockId.x,threadIdx.x,blockId.y,threadIdx.y映射到相应的下标上去,经常用得到。
■ 大部分技术封装到了bitmap.anim_and_exit()(接受两个函数指针,生成动画和清理显存),没有太多值得讨论的内容。
1 #include <stdio.h> 2 #include "cuda_runtime.h" 3 #include "device_launch_parameters.h" 4 #include "D:\\Code\\CUDA\\book\\common\\book.h" 5 #include "D:\\Code\\CUDA\\book\\common\\cpu_anim.h" 6 7 #define DIM 1024 8 #define PI 3.1415926535897932f 9 10 struct DataBlock { 11 unsigned char *dev_bitmap; 12 CPUAnimBitmap *bitmap; 13 }; 14 15 __global__ void kernel(unsigned char *ptr, int ticks)//计算帧图像中每一点的灰度值 16 { 17 //标准的坐标映射 18 int x = threadIdx.x + blockIdx.x * blockDim.x; 19 int y = threadIdx.y + blockIdx.y * blockDim.y; 20 int offset = x + y * blockDim.x * gridDim.x; 21 22 float fx = x - DIM / 2; 23 float fy = y - DIM / 2; 24 float d = sqrtf(fx * fx + fy * fy); 25 unsigned char grey = (unsigned char)(128.0f + 127.0f *cos(d / 10.0f - ticks / 7.0f) / (d / 10.0f + 1.0f)); 26 ptr[offset * 4 + 0] = grey; 27 ptr[offset * 4 + 1] = grey; 28 ptr[offset * 4 + 2] = grey; 29 ptr[offset * 4 + 3] = 255; 30 31 return; 32 } 33 34 void generate_frame(DataBlock *d, int ticks)//生成一帧图像 35 { 36 dim3 blocks(DIM / 16, DIM / 16); 37 dim3 threads(16, 16); 38 kernel << <blocks, threads >> >(d->dev_bitmap, ticks); 39 40 cudaMemcpy(d->bitmap->get_ptr(), d->dev_bitmap, d->bitmap->image_size(), cudaMemcpyDeviceToHost)); 41 42 return; 43 } 44 45 void cleanup(DataBlock *d)//释放显存 46 { 47 cudaFree(d->dev_bitmap); 48 } 49 50 int main(void) 51 { 52 DataBlock data; 53 CPUAnimBitmap bitmap(DIM, DIM, &data); 54 data.bitmap = &bitmap; 55 56 cudaMalloc((void**)&data.dev_bitmap, bitmap.image_size()); 57 58 bitmap.anim_and_exit((void(*)(void*, int))generate_frame, (void(*)(void*))cleanup); 59 60 getchar(); 61 return 0; 62 }
■ 程序输出,动态效果,从中间向四周扩散的波动。
● 点积(使用共享内存)
■ 在考虑线程块大小的时候经常用到向上取整,这里使用了技巧 ceil( a / b ) == floor( (a-1) / b) + 1
■ 算法总体想法是在GPU中将很长的向量分段放入GPU的各线程块中,每个线程块利用共享内存和多线程分别计算乘法和加法。结果整理为每个线程块输出一个浮点数,置于全局内存中,这样就将待计算的元素数量降到了 gridDim.x 的水平,再返回CPU中完成剩下的加法。
■ 算法预先规定了每个线程块使用256个线程(blockDim.x == 256),那么使用的线程块数量应该满足 gridDim.x * blockDim.x ≥ N(待计算的向量长度),另外代码中规定线程块数量至少为32(?书中说“选择其他的只可能产生更高或更差的性能,这取决于CPU和GPU的相对速度”)
■ 在核函数中使用了既定大小的共享内存 __shared__ float cache[threadsPerBlock]; ,并采用 __syncthreads(); 函数进行线程同步(因为接下来要进行规约运算,前提就是该线程块内所有的线程已经独立计算完毕)。
1 #include <stdio.h> 2 #include "cuda_runtime.h" 3 #include "device_launch_parameters.h" 4 #include "D:\\Code\\CUDA\\book\\common\\book.h" 5 6 #define imin(a,b) (a<b?a:b) 7 #define sum_squares(x) (x*(x+1)*(2*x+1)/6)//平方和计算式 8 9 const int N = 33 * 1024; 10 const int threadsPerBlock = 256; 11 const int blocksPerGrid = imin(32, (N + threadsPerBlock - 1) / threadsPerBlock); 12 13 __global__ void dot(float *a, float *b, float *c) 14 { 15 __shared__ float cache[threadsPerBlock]; 16 int tid = threadIdx.x + blockIdx.x * blockDim.x; 17 int cacheIndex = threadIdx.x; 18 19 float temp = 0.0f; 20 while (tid < N) 21 { 22 temp += a[tid] * b[tid]; 23 tid += blockDim.x * gridDim.x; 24 } 25 26 cache[cacheIndex] = temp;//局地内存转入共享内存 27 28 __syncthreads();//线程同步 29 30 int i = blockDim.x / 2;//二分规约,要求每个线程块的线程数必须是2^k形式 31 while (i != 0) 32 { 33 if (cacheIndex < i) 34 cache[cacheIndex] += cache[cacheIndex + i]; 35 __syncthreads(); 36 i /= 2; 37 } 38 39 if (cacheIndex == 0)//每个线程块的0号线程将,将计算结果从共享内存转入全局内存 40 c[blockIdx.x] = cache[0]; 41 42 return; 43 } 44 45 46 int main(void) 47 { 48 int i; 49 float *a, *b, c, *partial_c; 50 float *dev_a, *dev_b, *dev_partial_c; 51 52 a = (float*)malloc(N * sizeof(float)); 53 b = (float*)malloc(N * sizeof(float)); 54 partial_c = (float*)malloc(blocksPerGrid * sizeof(float)); 55 cudaMalloc((void**)&dev_a, N * sizeof(float)); 56 cudaMalloc((void**)&dev_b, N * sizeof(float)); 57 cudaMalloc((void**)&dev_partial_c, blocksPerGrid * sizeof(float)); 58 59 for (i = 0; i < N; i++) 60 { 61 a[i] = i; 62 b[i] = 2 * i; 63 } 64 65 cudaMemcpy(dev_a, a, N * sizeof(float), cudaMemcpyHostToDevice); 66 cudaMemcpy(dev_b, b, N * sizeof(float), cudaMemcpyHostToDevice); 67 68 dot <<< blocksPerGrid, threadsPerBlock >>> (dev_a, dev_b, dev_partial_c); 69 70 cudaMemcpy(partial_c, dev_partial_c,blocksPerGrid * sizeof(float),cudaMemcpyDeviceToHost); 71 72 //结果在CPU中汇总 73 for (i = 0, c = 0.0f; i < blocksPerGrid; c += partial_c[i], i++); 74 printf("\\n\\tAnswer:\\t\\t%.6g\\n\\tGPU value:\\t%.6g\\n", 2 * sum_squares((float)(N - 1)), c); 75 76 free(a); 77 free(b); 78 free(partial_c); 79 cudaFree(dev_a); 80 cudaFree(dev_b); 81 cudaFree(dev_partial_c); 82 83 getchar(); 84 return; 85 }
■ 错误的优化,想法是“只等待那些需要写入的线程来进行同步”,但是会导致有的线程无法抵达 __syncthreads() 函数而使程序停止响应。
1 while (i != 0) 2 { 3 if (cacheIndex < i) 4 { 5 cache[cacheIndex] += cache[cacheIndex + i]; 6 __syncthreads(); 7 } 8 i /= 2; 9 }
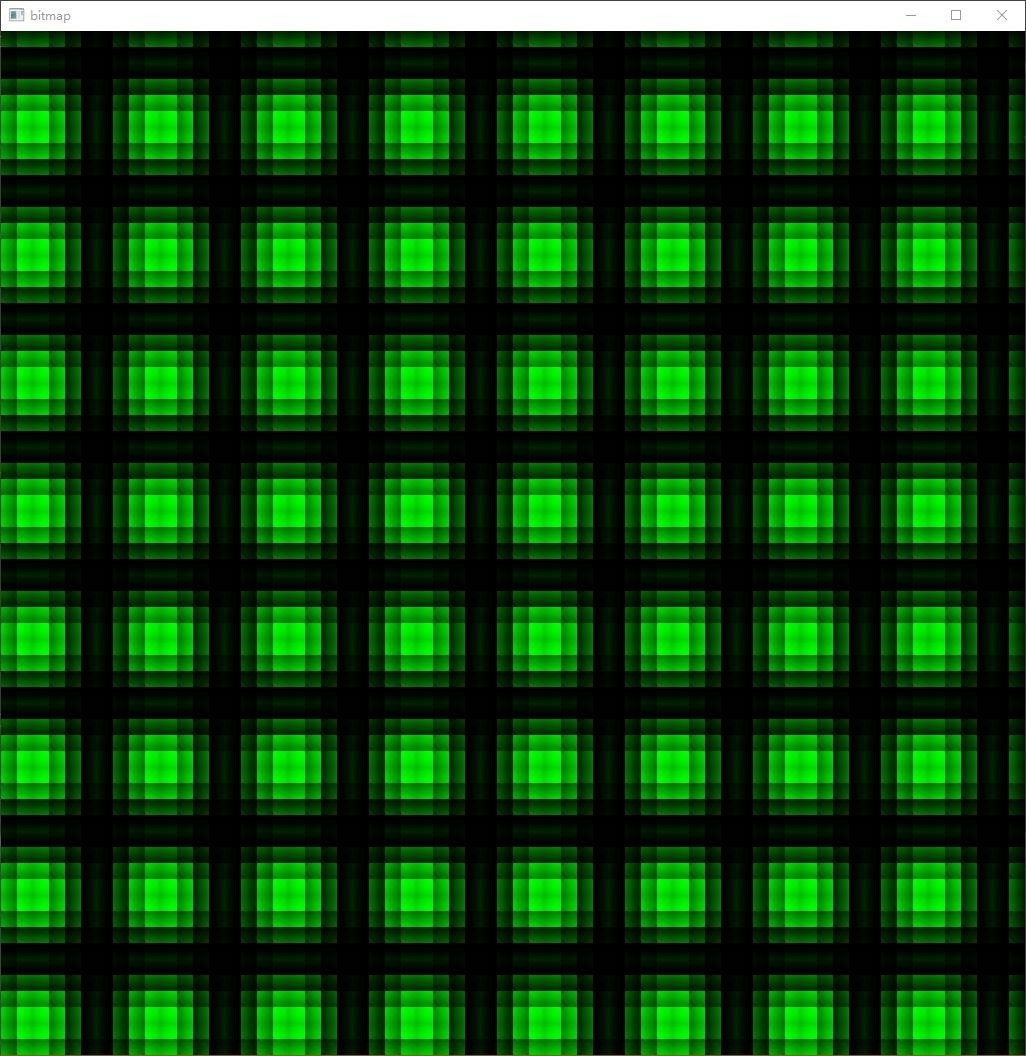
■ 正确同步的输出(左图)与不正确同步的输出(右图),共享内存中是否同步对程序结果的影响

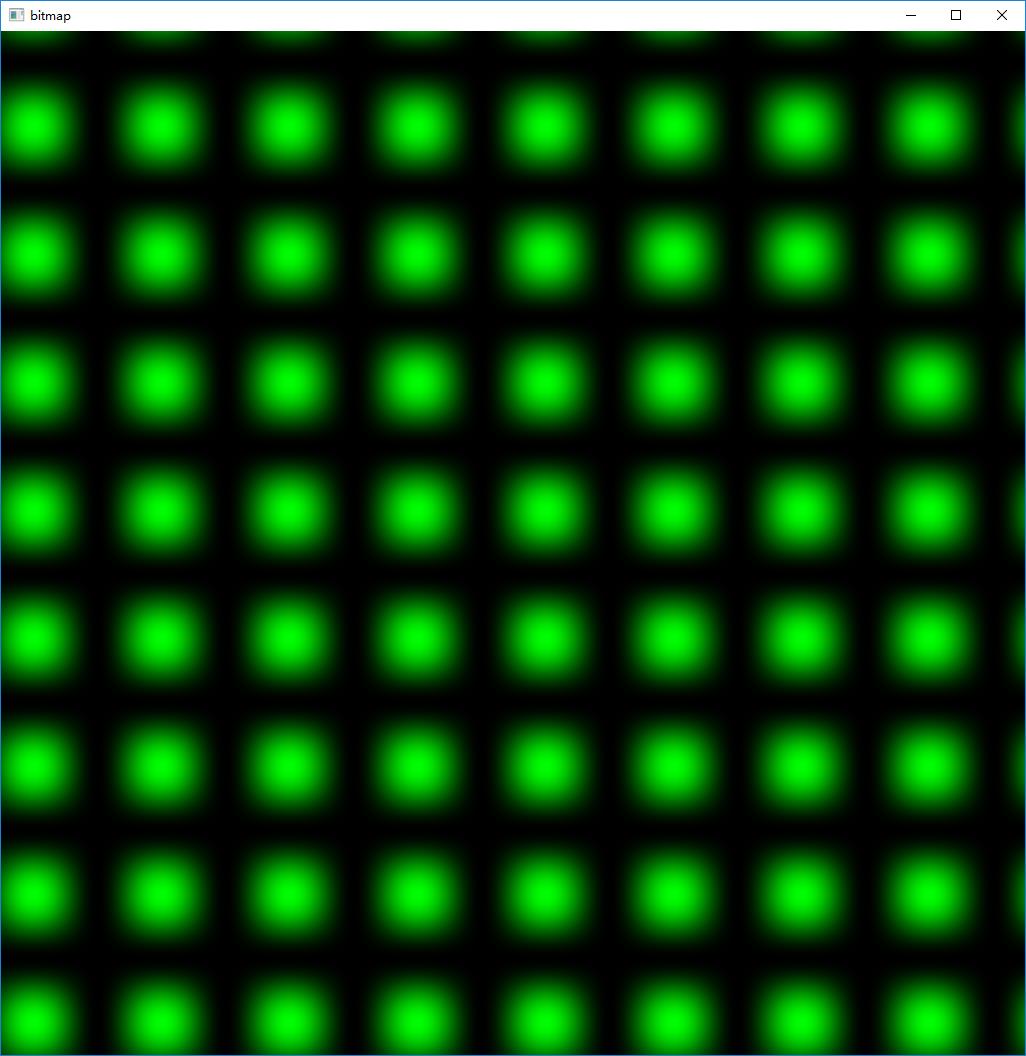
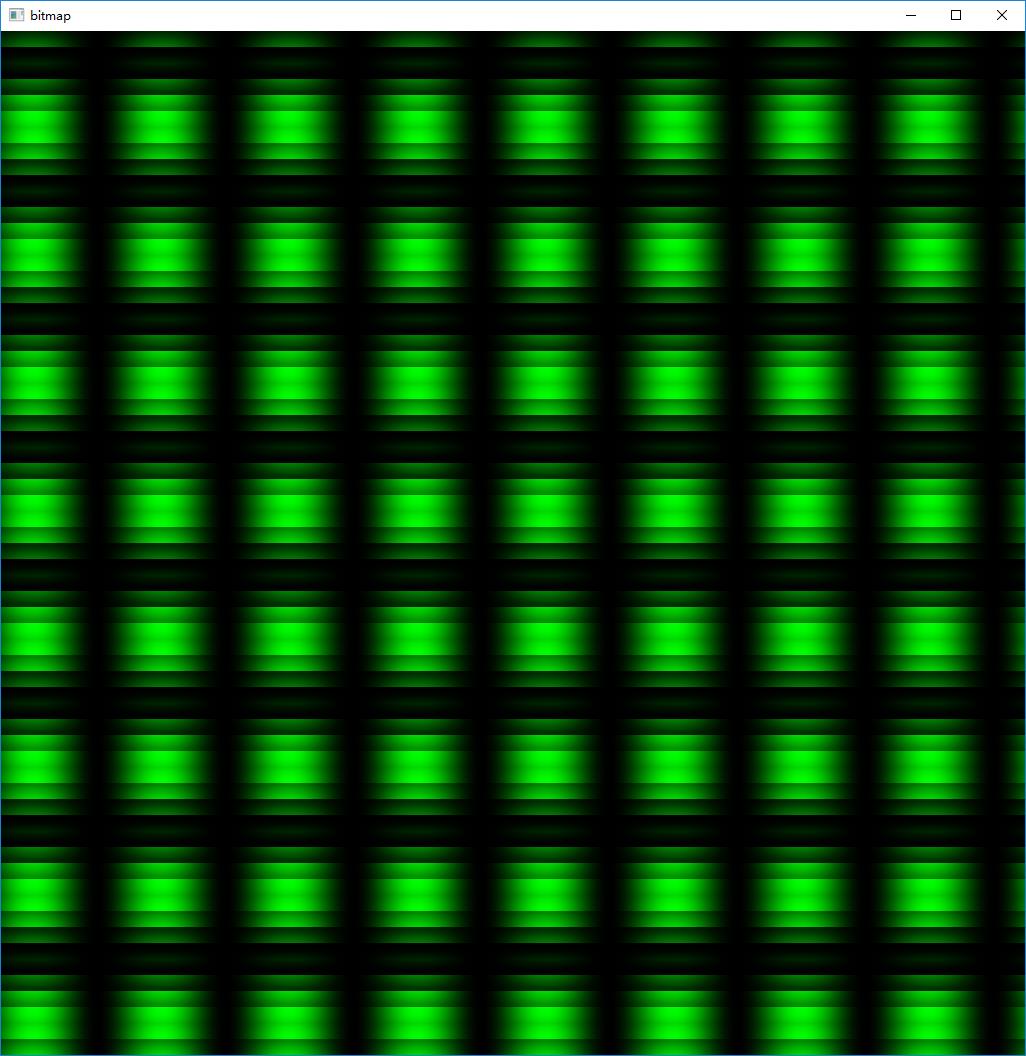
■ 有趣的改动,将核函数染色部分的代码改为 ptr[offset * 4 + 1] = shared[threadIdx.x][threadIdx.y]; (其他部分都不变),得到如下左图的圆形图案。特别的,如果只改 threadId.x 不改 15-threadIdx.y,得到水平方向上渐变,竖直方向上离散的右图效果。
以上是关于第五章 线程并行的主要内容,如果未能解决你的问题,请参考以下文章