《机电传动控制》第十一周作业
Posted Qiangcm
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了《机电传动控制》第十一周作业相关的知识,希望对你有一定的参考价值。
《机电传动控制》第十一周作业(二)
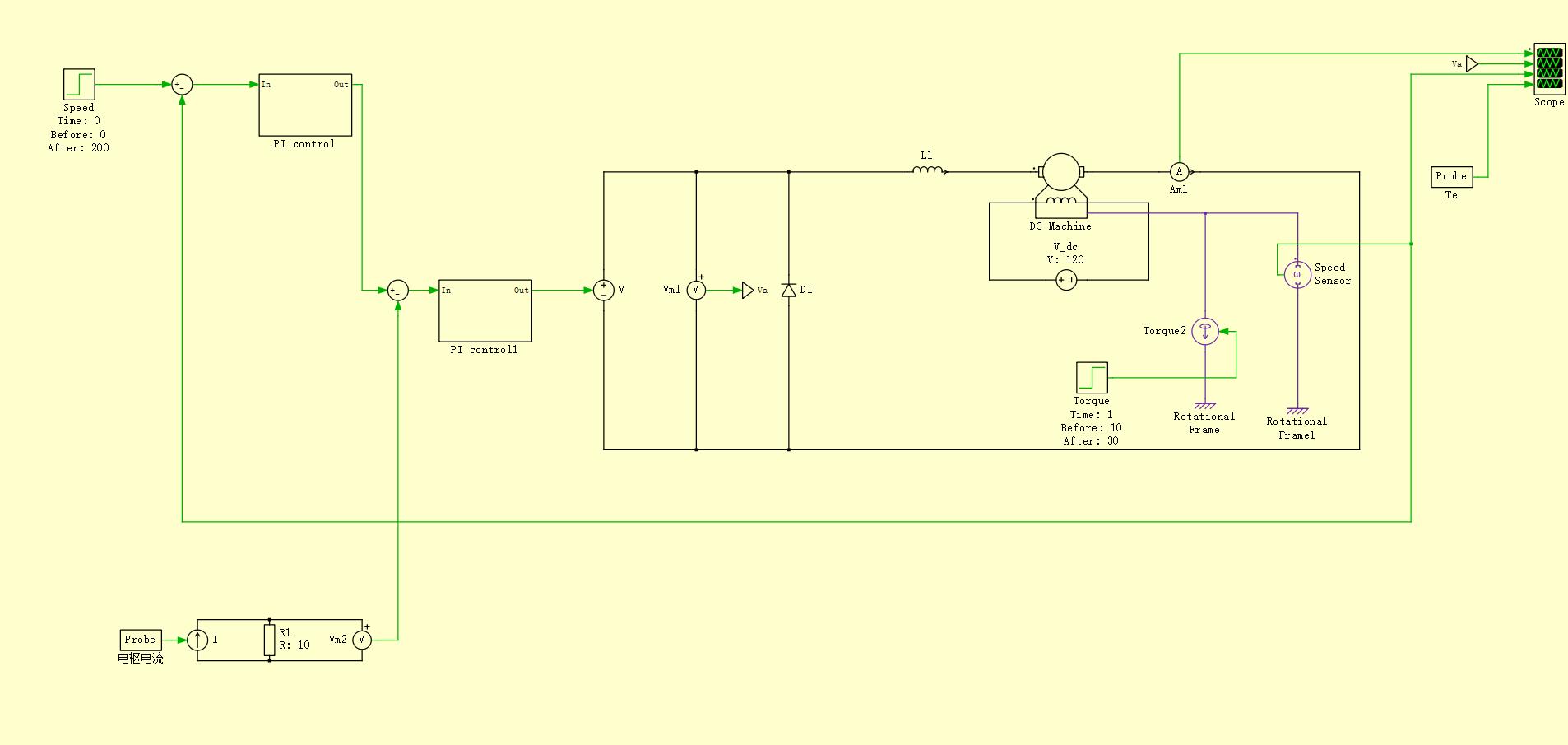
3. 直流电机双闭环调速系统控制仿真
把上述单闭环速度控制系统改为速度环和电流环双闭环控制系统,两个环路都使用PI控制器,先整定电流环参数,再整定速度环参数,获得最佳系统动态响应。
由第2问中的仿真结果可知,电枢电流的稳定值为25A,加在电动机上的电源电压为250V,不妨假设电动机允许的电流最大值为稳定值的2倍,即50A。当电枢电流为50A时,电源电压应为500V左右。所以搭建如下所示的电路来调整电流环的参数:

电流调节器PI内部的结构为:

仿真结果:

由仿真结果可以看出在开始的时候,电流值基本上是维持在50A左右。
接下来调整速度坏参数,搭建电路图如下:
速度调节器的PI结构:

仿真结果:

由仿真结果可知,最大冲击电流为50A,比第2问的173A下降了很多,达到稳定的时间为1.5s,所以与直流电机单闭环调速系统比例积分控制相比,动态特性有了很大的改善。
以上是关于《机电传动控制》第十一周作业的主要内容,如果未能解决你的问题,请参考以下文章