查找算法
Posted 段子手实习生
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了查找算法相关的知识,希望对你有一定的参考价值。
讲解之前我们先讲一个概念——符号表
符号表的最主要作用就是把一个键和一个值联系起来。
我们会使用符号表这个词来描述一张抽象的表格。我们会将信息(值)存在其中,然后按照指定的键来搜索并获取这些信息。
符号表有时被称为字典。就像是一步字典,键是词,值是释义。
符号表有时又叫索引。数组就是索引结构,键即索引,值即数组中的元素。
所有的实现要遵循以下规则:
1.每个键只对应一个值(表中不允许存在重复的键)。
2.当用例代码向表中存入的键值对和表中已有的键(及关联值)冲突时,新的值会替代旧的值。
1.无序链表查找
我们把所有的元素用一个无序的链表进行存储起来。每一个节点记录key值,value值以及指向下一个记录的对象。
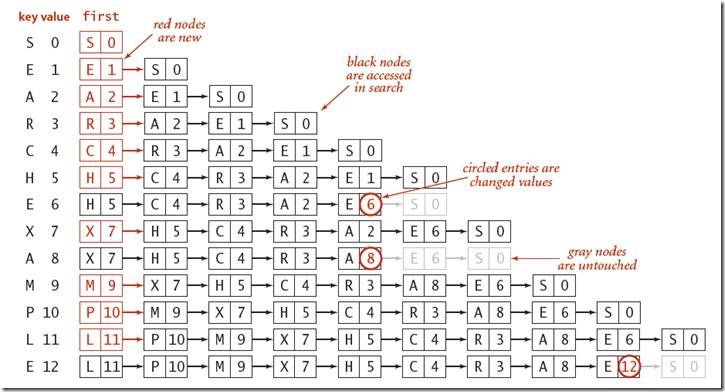
如图,当我们往链表中插入元素的时候,从表头开始查找,如果找到,则更新value,否则,在表头插入新的节点元素。
无序链表的插入和查找的*均时间复杂度均为O(n)。
2.二分查找
和采用无序链表实现不同,二分查找的思想是在内部维护一个按照key排好序的二维数组,每一次查找的时候,跟中间元素进行比较,如果该元素小,则继续左半部分递归查找,否则继续右半部分递归查找。
采用二分查找只需要最多lgN+1次的比较即可找到对应元素,所以查找效率比较高。
但是对于插入元素来说,每一次插入不存在的元素,需要将该元素放到指定的位置,然后,将他后面的元素依次后移,所以*均时间复杂度O(n),对于插入来说效率仍然比较低。
3.二叉查找树
二叉查找树(Binary Search Tree),也称有序二叉树(ordered binary tree),排序二叉树(sorted binary tree),是指一棵空树或者具有下列性质的二叉树:
1. 若任意节点的左子树不空,则左子树上所有结点的值均小于它的根结点的值;
2. 若任意节点的右子树不空,则右子树上所有结点的值均大于它的根结点的值;
3. 任意节点的左、右子树也分别为二叉查找树。
4. 没有键值相等的节点(no duplicate nodes)。
如下图,这个是普通的二叉树:

在此基础上,加上节点之间的大小关系,就是二叉查找树:

数据表示:一个键,一个值,一个左链接,一个右链接,一个节点计数器。
使用二叉查找树的算法的运行时间取决于树的形状,而树的形状又取决于键被插入的先后顺序。在最好的情况下,一颗含有N个节点的树是完全*衡的。我们假设我们的键都是(均匀)随机的。对这个模型来说,二叉查找树和快速排序几乎就是“双胞胎”。树的根节点就是快速排序中的第一个切分元素(左侧的键都 比它小,右侧的键都比它大),而这对于所有的子树都同样适用。这和快速排序中对子数组的递归排序完全一对应。
二叉树的增加、修改和查找操作都比较容易,比较难的是二叉树的删除操作。删除操作要保证树的有序性。
T.Hibbard在1962年提出第一个方法:在删除节点x后用它的后继节点填补它的位置。
删除步骤
1. 保存带删除的节点到临时变量t
2. 将t的右节点的最小节点min(t.right)保存到临时节点x
3. 将x的右节点设置为deleteMin(t.right),该右节点是删除后,所有比x.key最大的节点。
4. 将x的左节点设置为t的左节点。
范围查找:
要实现能够返回给定范围内键的keys()方法,我们首先需要一个遍历二叉树的基本方法——中序遍历——将所有所在给定范围以内的键都加入一个队列中,并跳过那些不可能含有所查找键的子树。
4.*衡二叉树
因为二叉查找树的形状依赖于输入顺序,当树的深度过大的时候,会造成性能的降低,极端情况下,树就变成了链表。为了避免树的高度增长过快,我们规定在插入和删除二叉树节点时,要保证任一节点的左右子树的高度差的绝对值不能超过1,讲这样的二叉树叫做*衡二叉树(AVL树)。定义节点的左子树和右子树的高度差为该节点的*衡因子,则*衡二叉树的*衡因子只有-1,1和0。
算法思想:
每当在二叉排序树中插入(或删除)一个节点时,首先要检查其插入路径上的节点是否因为此次操作而导致了不*衡。如果导致了不*衡,则先找到插入路径上离插入节点最*的*衡因子绝对值大于1的节点A,然后对A为根的子树金习性调整,来达到*衡。——每次调整的都是最小不*衡子树。
具体可以分为四种情况:LL*衡旋转,RR*衡旋转,LR*衡旋转,RL*衡旋转。(具体的可以参考《王道》)
5.*衡查找树
对于*衡二叉查找树,在动态插入中要保持树的完美*衡的代价实在太高了。这里我们稍稍放松完美*衡的要求。
5.1 2-3查找树
和二叉树不一样,2-3树运行每个节点保存1个或者两个的值。对于普通的2节点(2-node),他保存1个key和左右两个子节点的指针。对应3节点(3-node),保存两个Key,2-3查找树的定义如下:
1. 要么为空,要么:
2. 对于2节点,该节点保存一个key及对应value,以及两个指向左右节点的节点,左节点也是一个2-3节点,所有的值都比key小,右节点也是一个2-3节点,所有的值比key要大。
3. 对于3节点,该节点保存两个key及对应value,以及三个指向左中右的节点。左节点也是一个2-3节点,所有的值均比两个key中的最小的key还要小;中间节点也是一个2-3节点,中间节点的key值在两个跟节点key值之间;右节点也是一个2-3节点,节点的所有key值比两个key中的最大的key还要大。
如果中序遍历2-3查找树,就可以得到排好序的序列。在一个完全*衡的2-3查找树中,根节点到每一个为空节点的距离都相同。
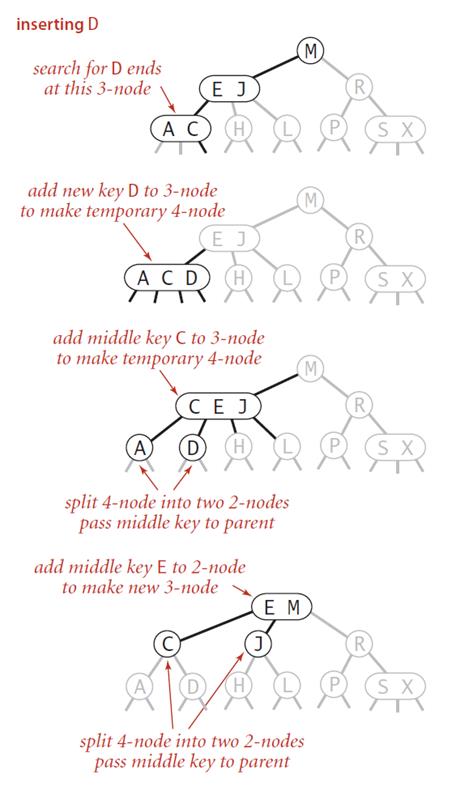
插入节点:
2-3查找树和二叉树不同,它的生长方式是从下往上增长的,插入节点的时候要插入到底部节点内,如果底部节点时2-node则不变,如果是3-node,则表示里边有两个节点,这时插入后,把中间节点提升到父节点中,左右节点分别作为它的左右节点。如果父节点是2-node则不变,如果是3-node的话, 需要继续往上传递,直到最后,如果根节点也往上传递了,则此时树的高度增加1。
2-3查找树在最坏的情况下依然可以保持很好的性能。每个操作中处理每个节点的时间都不会超过一个很小的常数。在含有10亿个节点的一颗2-3查找树的高度仅在19到30之间。我们最多只需要访问30个节点就可以在10亿个键中进行任意查找插入操作。
但是2-3查找树实现起来很麻烦:
- 需要处理不同的节点类型,非常繁琐
- 需要多次比较操作来将节点下移
- 需要上移来拆分4-node节点
- 拆分4-node节点的情况有很多种
2-3查找树实现起来比较复杂,在某些情况插入后的*衡操作可能会使得效率降低。在2-3查找树基础上改进的红黑树不仅具有较高的效率,并且实现起来较2-3查找树简单。
5.2 红黑树
直接实现2-3查找树比较麻烦,我们选择使用红黑树来实现2-3查找树。
红黑二叉树背后的基本思想是用标准二叉查找树(完全由2-节点构成)和一些额外的信息(替换3-节点)来表示2-3树。我们将树中的链接分为两种类型:红链接将两个2-节点连起来构成一个3-节点,黑链接则是2-3树中的普通链接。确切的说,我们将3-节点表示为一条左斜的红色链接(两个2-节点其中之一是另一个的左节点)相连的两个2-节点。我们这样做的优点是:我们无需修改就可以直接使用标准二叉查找树的查找方法。
对于任意2-3查找树,只要对节点进行转换,我们都可以立即派生出一颗对应的二叉查找树,我们称之为红黑二叉查找树。
根据以上描述,红黑树定义如下:
红黑树是一种具有红色和黑色链接的*衡查找树,同时满足:
- 红色节点向左倾斜
- 一个节点不可能有两个红色链接
- 整个书完全黑色*衡,即从根节点到所以叶子结点的路径上,黑色链接的个数都相同。
下图可以看到红黑树其实是2-3树的另外一种表现形式:如果我们将红色的连线水*绘制,那么他链接的两个2-node节点就是2-3树中的一个3-node节点了。

红黑树的插入和删除操作依然比较复杂,具体的可以参考其他的博客和课本。
在最坏的情况下,红黑树的高度不超过2lgN
最坏的情况就是,红黑树中除了最左侧路径全部是由3-node节点组成,即红黑相间的路径长度是全黑路径长度的2倍。
下图是一个典型的红黑树,从中可以看到最长的路径(红黑相间的路径)是最短路径的2倍:

红黑树的*均高度大约为lgN
红黑树接*完美*衡的,它能够保证对数级别的查找和插入操作。
6.B/B+树
1970年,R.Bayer和E.mccreight提出了一种适用于外查找的树,它是一种*衡的多叉树,称为B树(或B-树、B_树)。
B/B+树是为了磁盘或其它存储设备而设计的一种*衡多路查找树(相对于二叉,B树每个内节点有多个分支),与红黑树相比,在相同的的节点的情况下,一颗B/B+树的高度远远小于红黑树的高度。B/B+树上操作的时间通常由存取磁盘的时间和CPU计算时间这两部分构成,而CPU的速度非常快,所以B树的操作效率取决于访问磁盘的次数,关键字总数相同的情况下B树的高度越小,磁盘I/O所花的时间越少。
B树的性质
- 定义任意非叶子结点最多只有M个儿子;且M>2;
- 根结点的儿子数为[2, M];
- 除根结点以外的非叶子结点的儿子数为[M/2, M];
- 每个结点存放至少M/2-1(取上整)和至多M-1个关键字;(至少2个关键字)
- 非叶子结点的关键字个数=指向儿子的指针个数-1;
- 非叶子结点的关键字:K[1], K[2], …, K[M-1];且K[i] < K[i+1];
- 非叶子结点的指针:P[1], P[2], …, P[M];其中P[1]指向关键字小于K[1]的子树,P[M]指向关键字大于K[M-1]的子树,其它P[i]指向关键字属于(K[i-1], K[i])的子树;
- 所有叶子结点位于同一层;
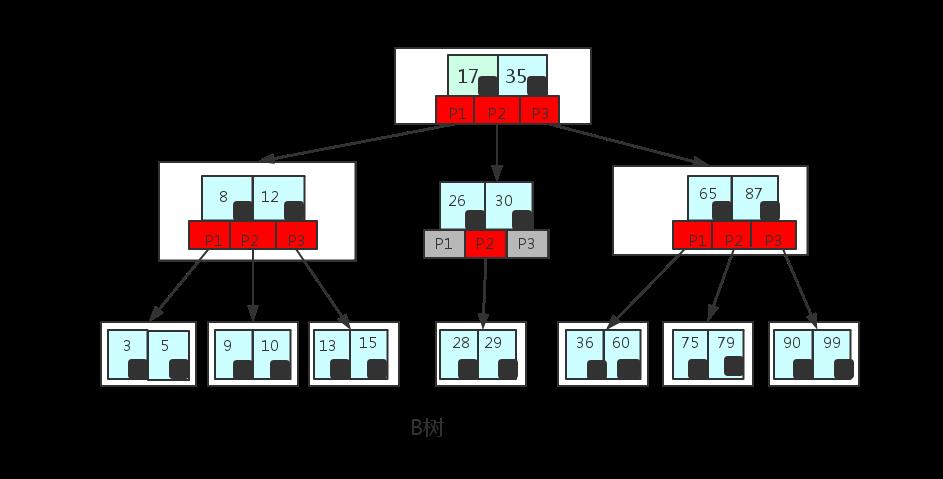
这里只是一个简单的B树,在实际中B树节点中关键字很多的.上面的图中比如35节点,35代表一个key(索引),而小黑块代表的是这个key所指向的内容在内存中实际的存储位置.是一个指针.
B+树
B+树是应文件系统所需而产生的一种B树的变形树(文件的目录一级一级索引,只有最底层的叶子节点(文件)保存数据.),非叶子节点只保存索引,不保存实际的数据,数据都保存在叶子节点中.这不就是文件系统文件的查找吗?我们就举个文件查找的例子:有3个文件夹,a,b,c, a包含b,b包含c,一个文件yang.c, a,b,c就是索引(存储在非叶子节点), a,b,c只是要找到的yang.c的key,而实际的数据yang.c存储在叶子节点上.
所有的非叶子节点都可以看成索引部分
B+树的性质(下面提到的都是和B树不相同的性质)
- 非叶子节点的子树指针与关键字个数相同;
- 非叶子节点的子树指针p[i],指向关键字值属于[k[i],k[i+1]]的子树.(B树是开区间,也就是说B树不允许关键字重复,B+树允许重复);
- 为所有叶子节点增加一个链指针.
- 所有关键字都在叶子节点出现(稠密索引). (且链表中的关键字恰好是有序的);
- 非叶子节点相当于是叶子节点的索引(稀疏索引),叶子节点相当于是存储(关键字)数据的数据层.
- 更适合于文件系统;
看下图: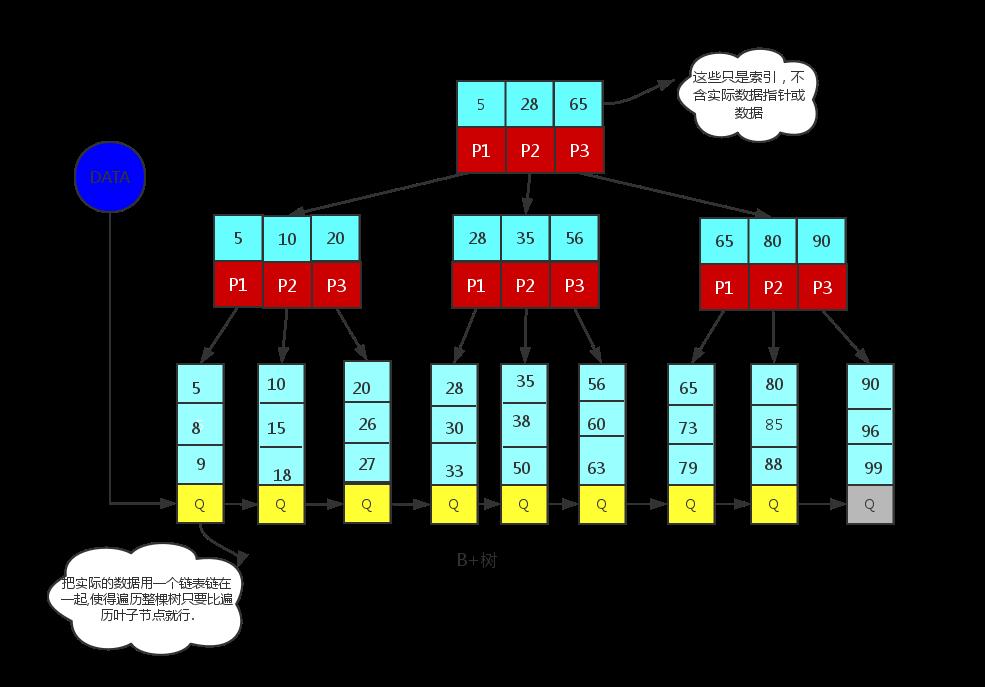
非叶子节点(比如5,28,65)只是一个key(索引),实际的数据存在叶子节点上(5,8,9)才是真正的数据或指向真实数据的指针.
应用
B和B+树主要用在文件系统以及数据库做索引.比如mysql;
B/B+树性能分析
- n个节点的*衡二叉树的高度为H(即logn),而n个节点的B/B+树的高度为logt((n+1)/2)+1;
- 若要作为内存中的查找表,B树却不一定比*衡二叉树好,尤其当m较大时更是如此.因为查找操作CPU的时间在B-树上是O(mlogtn)=O(lgn(m/lgt)),而m/lgt>1;所以m较大时O(mlogtn)比*衡二叉树的操作时间大得多. 因此在内存中使用B树必须取较小的m.(通常取最小值m=3,此时B-树中每个内部结点可以有2或3个孩子,这种3阶的B-树称为2-3树)。
为什么说B+tree比B树更适合实际应用中操作系统的文件索引和数据索引?
- B+-tree的内部节点并没有指向关键字具体信息的指针,因此其内部节点相对B树更小,如果把所有同一内部节点的关键字存放在同一盘块中,那么盘块所能容纳的关键字数量也越多,一次性读入内存的需要查找的关键字也就越多,相对IO读写次数就降低了.
- 由于非终结点并不是最终指向文件内容的结点,而只是叶子结点中关键字的索引。所以任何关键字的查找必须走一条从根结点到叶子结点的路。所有关键字查询的路径长度相同,导致每一个数据的查询效率相当。
ps:我在知乎上看到有人是这样说的,我感觉说的也挺有道理的:
他们认为数据库索引采用B+树的主要原因是:B树在提高了IO性能的同时并没有解决元素遍历的我效率低下的问题,正是为了解决这个问题,B+树应用而生.B+树只需要去遍历叶子节点就可以实现整棵树的遍历.而且在数据库中基于范围的查询是非常频繁的,而B树不支持这样的操作(或者说效率太低).
7.散列表
如果所有的键都是小整数,我们可用一个数组来实现无序的符号表,将键作为数组的索引而数组中键i处存储的就是它对应的值。这样我们就可以快速访问任意键的值。
但是这个方法有局限性:当键的范围特别的广,数组会很稀疏,造成浪费。而且只适合处理整数。
这里我们将这个方法扩展成能够处理更加复杂的类型的键——散列表
散列表连个步骤:
1.用散列函数将被查找的键转化为数组的一个索引。理想情况下,不同的键都能转换成不同的索引值。
2.处理碰撞冲突(拉链法和线性探测法)
散列函数和键的类型有关。严格的说,对于每种类型的键我们都需要一个与之对应的散列函数。如果是一个数,比如社会保险号,我们就可以直接使用这个数;如果键是一个字符串,比如一个人的名字,我们就需要将这个字符串转化成一个数;如果键包含很多部分,比如邮件地址,我们需要使用某些方法将这些部分组合起来。
正整数使用最常见的是除留余数法。我们选择大小为素数M的数组,对于任意正整数K,计算K除以M的余数。
为什么要选择素数?
如果M不是素数,我们可能无法利用键中包含的所有信息,这可能导致我们无法均匀的散列散列值。例如键是十进制而M为10的幂,那么我们只能利用键的后k位,这可能会导致一些问题。如下图所示:
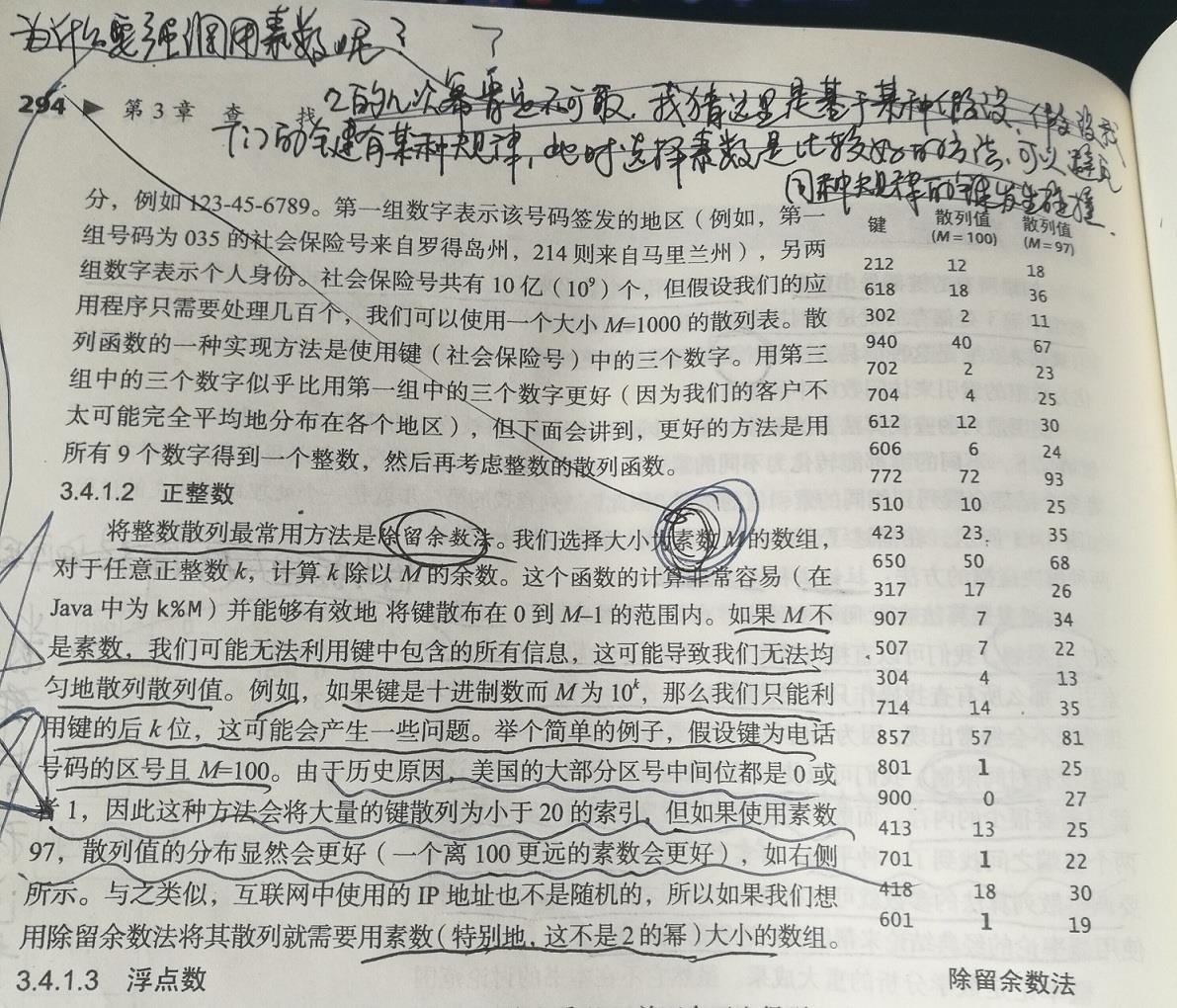
我们是基于某种假设——我们的键具有某种规律,而不是随机的,此时选择素数是规避风险的一种好的方法。
基于拉链法的散列表的实现简单。在键的顺序并不重要的应用中,它可能是最快的(也是使用最广泛的)符号表实现。
基于拉链的散列表可以直接删除元素,而基于线性探测的散列表删除元素后,要将簇中被删除键的右侧的所有键都重新插入散列表。
线性探测的性能取决于元素在插入数组后聚集成的一组连续的条目,也叫键簇。短小键簇才能保证较高的效率。
符号表的缺陷:
1.每种类型的键都需要一个优秀的散列函数;
2.性能保证来自于散列函数的质量;
3.散列函数的计算可能复杂而且昂贵;
4.难以支持有序性相关的符号表操作。
总结:
猜测:
2-3查找树是B树的一种特殊形式吗?
题
1.海量数据——给定a,b两个文件,各存放了50亿个url,每个url各占64字节,内存限制是4G,让你找出a,b文件共同的url?
解:可以估计每个文件的大小为5G*64=320G,远远大于内存限制的4G,所以不可能将其完全加载到内存中处理,考虑采取分而治之的办法。
①hash映射:遍历文件a,对每一个url求取,然后根据所得的值将url分别存储到1000个小文件中,这样每个小文件大小为300M,遍历文件b,采取a相同的方式将url分别存储到1000个小文件中,这样处理之后,所有可能的url都在对应的小文件中,我们只要求出1000对小文件中相同的url即可。
②hash_set统计:求每队小文件中相同的url时,可以把其中一个小文件存储到hash_set中,然后遍历另一个小文件的每个url,看其中是否存在刚才构建的hash_set中,然后遍历另一个小文件中的每个url,看其是否存在刚才构建的hash_set中,如果是,那么就是共同的url。
参考:http://m.blog.csdn.net/article/details?id=51926985
http://www.cnblogs.com/yangecnu/p/Introduce-Symbol-Table-and-Elementary-Implementations.html
《算法 第四版》
《王道 联考复习指导》
以上是关于查找算法的主要内容,如果未能解决你的问题,请参考以下文章