深度强化学习(Deep Reinforcement Learning)入门:RL base & DQN-DDPG-A3C introduction
Posted FDU大学渣——海疯习习
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了深度强化学习(Deep Reinforcement Learning)入门:RL base & DQN-DDPG-A3C introduction相关的知识,希望对你有一定的参考价值。
转自https://zhuanlan.zhihu.com/p/25239682
过去的一段时间在深度强化学*领域投入了不少精力,工作中也在应用DRL解决业务问题。子曰:温故而知新,在进一步深入研究和应用DRL前,阶段性的整理下相关知识点。本文集中在DRL的model-free方法的Value-based和Policy-base方法,详细介绍下RL的基本概念和Value-based DQN,Policy-based DDPG两个主要算法,对目前state-of-art的算法(A3C)详细介绍,其他前沿算法的详细理解留待后续展开。
一、RL:a simple introduction
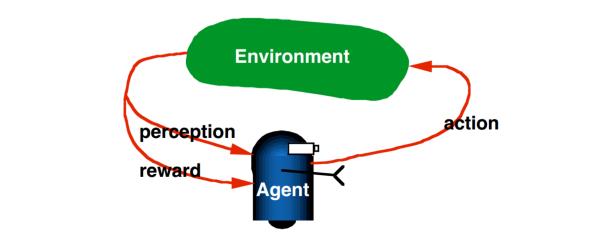
强化学*是机器学*的一个分支,相较于机器学*经典的有监督学*、无监督学*问题,强化学*最大的特点是在交互中学*(Learning from Interaction)。Agent在与环境的交互中根据获得的奖励或惩罚不断的学*知识,更加适应环境。RL学*的范式非常类似于我们人类学*知识的过程,也正因此,RL被视为实现通用AI重要途径。
1.1 强化学*问题的基本设定:
<A, S, R, P>
Action space : A
State space : S
Reward: R : S × A × S → R
Transition : P :S × A → S <A, S, R, P>就是RL中经典的四元组了。A代表的是Agent的所有动作;State是Agent所能感知的世界的状态;Reward是一个实数值,代表奖励或惩罚;P则是Agent所交互世界,也被称为model。基于此以下给出强化学*系统的几个重要概念:
- Policy: Policy是指Agent则是在状态s时,所要做出action的选择,定义为
,是RL中最核心的问题了。policy可以视为在Agent感知到环境后s后到动作a的一个mapping。如果策略是随机的,policy是根据每个动作概率
选择动作;如果策略是确定性的,policy则是直接根据状态s选择出动作
。


- Reward Signal:reward signal定义了Agent学*的目标。Agent每一次和环境交互,环境返回reward,告诉Agent刚刚的action是好的,还是不好的,可以理解为对agent的奖励和惩罚,agent与环境交互的序列流见下图。需要注意的是,Reward
Goal!即agent的目标并非当前reward最大,而是平均累计回报最大。

- Value function:Reward Signal定义的是评判一次交互中的立即的(immediate sense)回报好坏。而Value function则定义的是从长期看action平均回报的好坏。比如象棋中,吃掉对方一个“车”的即时收益很大,但如果因为吃“车”,老“将”被对方吃掉,显然长期看吃“车”这个action是不好的。即一个状态s的value是其长期期望Reward的高低。定义
是策略
是策略
- 定义
为长期回报期望(Return):
- 定义
-
-
状态s的value为:
-
- 状态s下采取动作a的Q值为:
- 状态s下采取动作a的Q值为:
-
- 其中
是长期收益的折扣因子,类似于金融中的折现率
- 其中
- Model of the environment:model是对真实世界(environment)的模拟,model建模的是agent采样action后环境的反应。RL中,使用model和planning的方法被称为model-based,反之不使用model而是通过try-and-error学*policy的方法被称为model-free。本文范畴即是model-free。


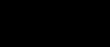
1.2 强化学*:一个MDP(Markov Decision Process)过程:
RL的重要基础是MDP了,其中Markov体现在:

即在状态时,采取动作
后的状态
和收益
只与当前状态和动作有关,与历史状态无关。(如果与“历史状态”相关,那么把这个状态封装到
即可了)。而Decision则体现在在每一个状态s处,都是要进行决策采取什么行动,即policy了。
1.3 Bellman等式
Bellman等式是RL最核心的公式了,虽然重要,但推导起来其实非常简单好理解,推导过程就省略了。
Bellman equation
Bellman optimality equation
1.4 MC、TD
有关RL的基础,再简单介绍下 MC、TD方法,其他内容篇幅原因不再展开了。
Monte-Carlo method适用于“情节式任务”(情节任务序列有终点,与“情节式任务”相对应的是“连续型任务”)。Q(s,a)就是整个序列的期望回报。MC增量更新中的Monte-Carlo error:

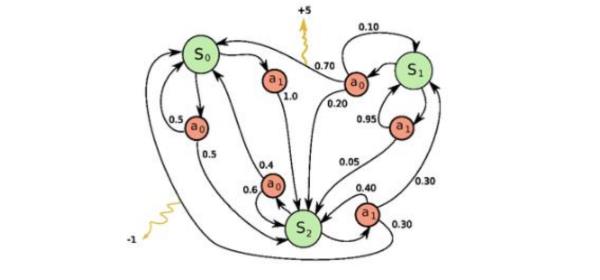
TD(Time Difference) method,是Monte-Carlo和Dynamic Programming 方法的一个结合。相比MC方法,TD除了能够适用于连续任务外,和MC的差异从下图可以清楚看到。MC需要回退整个序列更新Q值,而TD只需要回退1步或n步更新Q值。因为MC需要等待序列结束才能训练,而TD没有这个限制,因此TD收敛速度明显比MC快,目前的主要算法都是基于TD。下图是TD和MC的回退图,很显然MC回退的更深。
直观理解MC error和TD error的差异,假设RL的任务要预估的是上班的"到公司时长",状态是目前的位置,比如“刚出门”“到地铁了”“到国贸站了”...。MC方法需要等到真正开到公司才能校验“刚出门”状态时预估的正确性,得到MC error;而TD则可以利用“刚出门”和“到地铁了”两个状态预测的差异的1-step TD error来迭代。
1-step TD error:

n-steps TD error:
error:
事实上,MC error可以视为一个情节任务的max-step TD error。另外,一般来说,在TD error中,n越大,用到的真实回报信息更多,收敛也会越快。
二、DRL:from Q-learning to DQN
Q-learning一种TD方法,也是一种Value-based的方法。所谓Value-based方法,就是先评估每个action的Q值(Value),再根据Q值求最优策略的方法。强化学*的最终目标是求解policy,因此Value-based的方法是一种“曲线救国”。Q-learning算法的核心就是我们1.3中介绍的Bellman optimality equation,即:
Q-learning是RL的很经典的算法,但有个很大的问题在于它是一种表格方法,也就是说它非常的直来之前,就是根据过去出现过的状态,统计和迭代Q值。一方面Q-learning适用的状态和动作空间非常小;另一方面但如果一个状态从未出现过,Q-learning是无法处理的。也就是说Q-learning压根没有预测能力,也就是没有泛化能力。
为了能使得Q的学*能够带有预测能力,熟悉机器学*的同学很容易想到这就是一个回归问题啊!用函数拟合Q:![]()
代表的是模型参数,
模型有很多种选择,线性的或非线性的。传统的非深度学*的函数拟合更多是人工特征+线性模型拟合。这几年伴随着深度学*最*几年在监督学*领域的巨大成功,用深度神经网络端到端的拟合Q值,也就是DQN,似乎是个必然了。
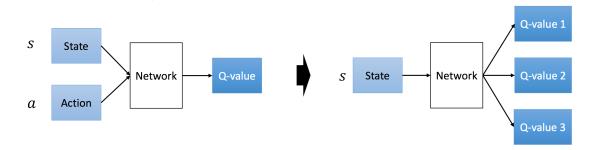
deepmind 在2013年的 Playing Atari with Deep Reinforcement Learning 提出的DQN算是DRL的一个重要起点了,也是理解DRL不可错过的经典模型了。网络结构设计方面,DQN之前有些网络是左图的方式,输入为S,A,输出Q值;DQN采用的右图的结构,即输入S,输出是离线的各个动作上的Q值。之所以这样,左图方案相对右图最大的缺点是对于每个state,需要计算次前向计算,而右图则只需要一次前向计算即可,因此左图的前向计算成本与action的数量成正比。
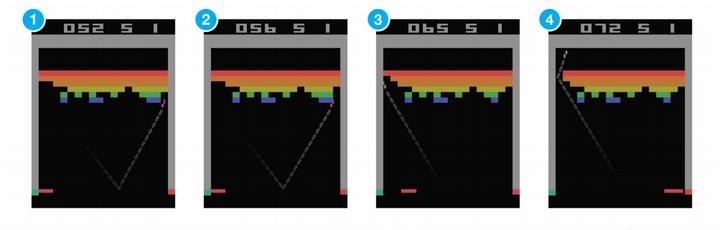
论文中,解决的问题是Atari游戏问题,输入数据(状态S)就是游戏原始画面的像素点,动作空间是摇杆方向等。这也是DNN带来的最大好处,有过特征工程经验的同学自然理解,不做特征工程想想都觉得轻松,更不要提效果还能提升了
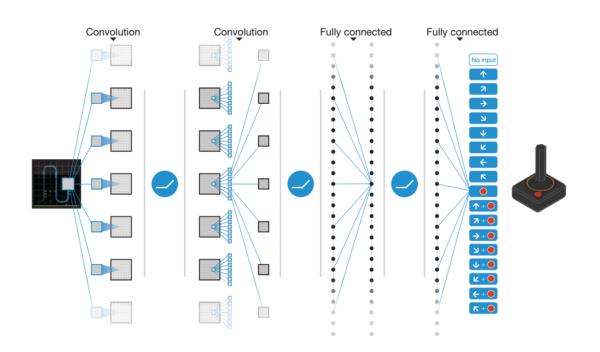
DQN具体的网络结构见下:实际输入是游戏的连续4帧画面,不只使用1帧画面为了感知环境的动态性,接两层CNN,两层FNN,输出各个动作的Q值。
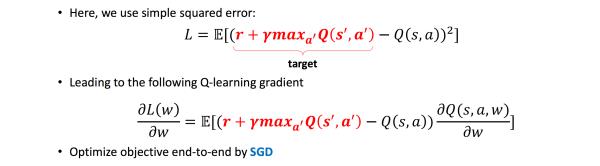
因为DQN本身是个回归问题,模型的优化目标是最小化1-step TD error的平方loss,梯度的计算也很直接了,见下图。
DQN最终能够取得成功的一方面是采用了DNN网络进行Q值的函数拟合,end-to-end的模型训练。更重要的是引入了以下两个点:
- Experience Replay:DeepLearning取得重大进展的监督学*中,样本间都是独立同分布的。而RL中的样本是有关联的,非静态的(highly correlated and non-stationary),训练的结果很容易难以收敛。Experience Replay机制解决这个问题思路其实很简单,构建一个存储把样本都存储下来,通过随机采样去除相关性。(当然没有天下免费的午餐,这种方法也有弊端,比如off-policy受到了限制,也不是真正的online-learning,具体在A3C部分会展开分析)
- separate Target Network:原始的Q-learning中,在1-step TD return,样本标签y使用的是和训练的Q-network相同的网络。这样通常情况下,能够使得Q大的样本,y也会大,这样模型震荡和发散可能性变大。而构建一个独立的慢于当前Q-Network的target Q-Network来计算y,使得训练震荡发散可能性降低,更加稳定。
- 另外,TD-error也被clip到[-1,1]区间,增加模型的稳定性。部分思路和我们后续分享的的TRPO算法的置信区间相关。
详细的DQN算法:
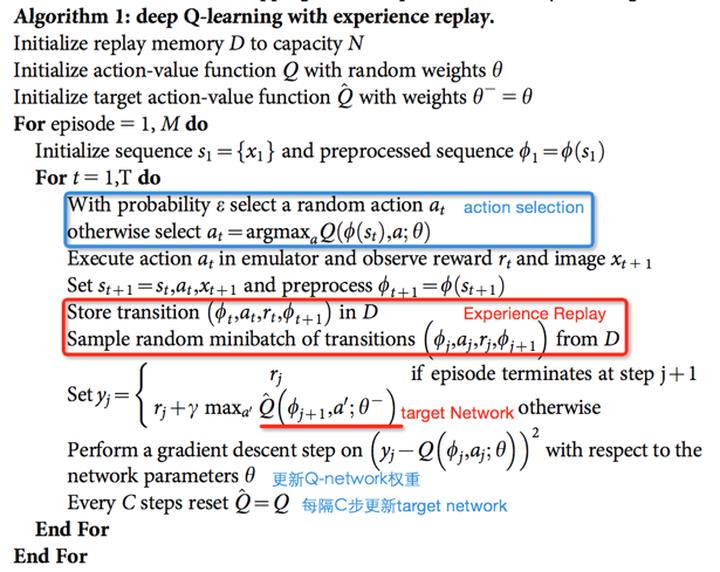
附DQN15年发表在nature的文章 Human-level control through deep reinforcement learning
后续关于DQN有三个主要改进点:
- Double Q-Network:思路并不新鲜,仿照Double Q-learning,一个Q网络用于选择动作,另一个Q网络用于评估动作,交替工作,解决upward-bias问题,效果不错。三个臭皮匠顶个诸葛亮么,就像工作中如果有double-check,犯错的概率就能平方级别下降。Silver15年论文Deep Reinforcement Learning with Double Q-learning
- Prioritized replay:基于优先级的replay机制,replay加速训练过程,变相增加样本,并且能独立于当前训练过程中状态的影响。这个replay权重还是和DQN error(下图)有关,Silver16年论文PRIORITIZED EXPERIENCE REPLAY。

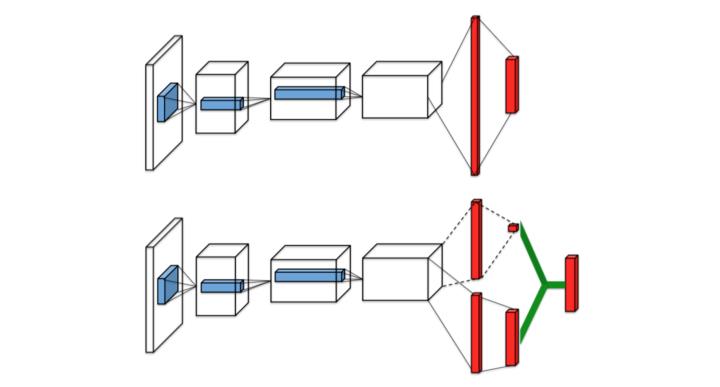
- Dueling network:在网络内部把Q(s,a) 分解成 V(s) + A(s, a),V(s)与动作无关,A(s, a)与动作相关,是a相对s平均回报的相对好坏,是优势,解决reward-bias问题。RL中真正关心的还是策略的好坏,更关系的是优势,另外在某些情况下,任何策略都不影响回报,显然需要剔除。ICML 2016 Best Paper:DUELING NETWORK ARCHITECTURES FOR DEEP REINFORCEMENT LEARNING 。Dueling Network网络架构如下,Dueling Network把网络分成一个输出标量V(s)另一个输出动作上Advantage值两部分,最后合成Q值。非常巧妙的设计,当然还是end-to-end的,效果也是state-of-art。Advantage是一个比较有意思的问题,A3C中有一个A就是Advantage,计划后面把Advantage单独拉出来研究下单独分享。
三、Policy-Based method:概率输出&连续动作空间
DQN虽然在Atari游戏问题中取得了巨大的成功,但适用范围还是在低维、离散动作空间。DQN是求每个action的,在连续空间就不适用了,原因如下:
- 如果采用把连续动作空间离散化,动作空间则会过大,极难收敛。比如连续动作空间=10,每个动作划分成3个离散动作,动作空间将扩大到
。而且每个动作空间划分成3个离散动作无法做到fine-tuning,划分本身也带来了信息损失。
- 即便是有些DQN的变种如VAE能够给出连续动作的方案,DQN的第二个问题是只能给出一个确定性的action,无法给出概率值。而有些场景,比如围棋的开局,只有一种走法显然太死板了,更多例子不再介绍了。
从另外一个角度看,DQN是Value-based方法,上一节讲到了Value-based的方法还是在间接求策略。一个自然的逻辑是为什么我们不直接求解Policy?这就是Policy Gradient方法了。
3.1 策略梯度
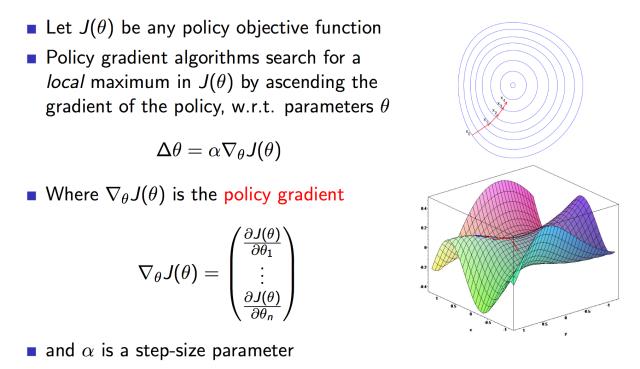
策略梯度方法中,参数化策略为
,然后计算得到动作上策略梯度,沿着梯度方法,一点点的调整动作,逐渐得到最优策略。

定义为整体的performance metrics。下图截取的PPT页很好的表达了PG的原理。
3.2 随机和确定性策略梯度
Sutton早在1999年就发表论文Policy Gradient Methods for Reinforcement Learning with Function Approximation证明了随机策略梯度的计算公式:

证明过程就不贴了,有兴趣读一下能加深下理解。也可以读读 REINFORCE算法(with or without Baseline)Simple statistical gradient-following algorithms for connectionist reinforcement learning,92年的文章了,略微老了些。
David Silver在14年的论文Deterministic Policy Gradient Algorithms(DPG)证明了DPG的策略梯度公式,结论同样非常简洁:
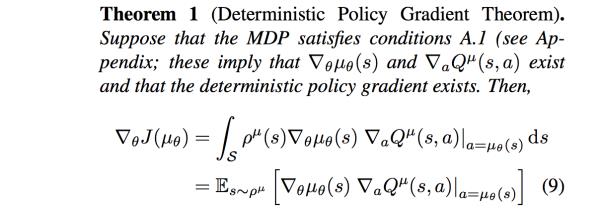
太理论性的东西不多贴了,有两个点值得注意:
- DPG和随机策略梯度SPG差异在于随机策略梯度中有一个log项,本质上源于随机策略需要重新加一层策略u的期望,导致策略网络u的梯度相对DPG需要除以策略u,数学转化成log(u)的倒数了。这个形式和交叉熵很接*,其实完全可以从概率角度去理解,有物理意义。
- DPG中本质上式在max(Q),和DQN最终竟还是殊途同归,直观的去理解的话,Policy是按照Q值最大的方向调整policy的参数。
3.3 深度确定性策略梯度
google的这篇DDPG论文CONTINUOUS CONTROL WITH DEEP REINFORCEMENT LEARNING结合了上文中DQN和DPG,把DRL推向了连续动作空间控制。
- actor-critic:在介绍DDPG前,简单的介绍下 actor-critic算法。actor-critic算法是一种TD method。结合了value-based和policy-based方法。policy网络是actor(行动者),输出动作(action-selection)。value网络是critic(评价者),用来评价actor网络所选动作的好坏(action value estimated),并生成TD_error信号同时指导actor网络critic网络的更新。下图为actor-critic算法的一个架构图,DDPG就是这一类算法。
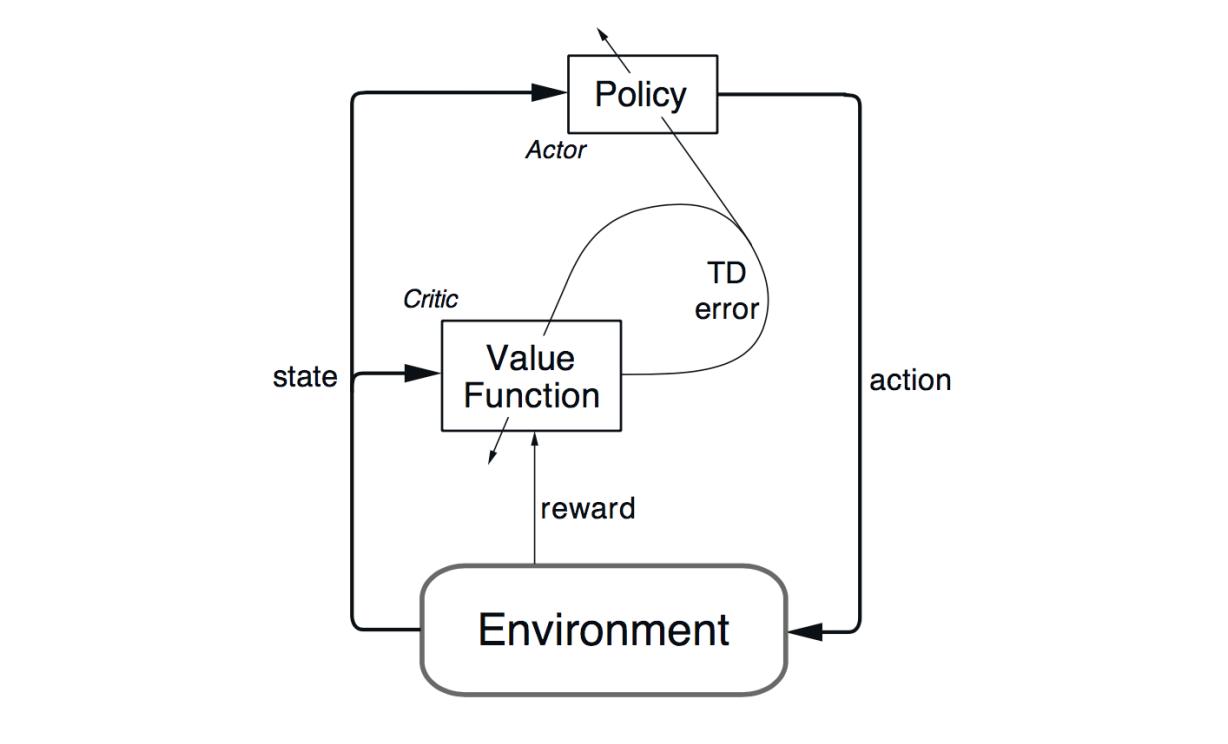
DDPG中,actor网络的输入时state,输出action,以DNN进行函数拟合,对于连续动作NN输出层可以用tanh或sigmod,离散动作以softmax作为输出层则达到概率输出的效果。critic网络输入为state和action,输出为Q值。本文介绍的是off-policy的 Deterministic Actor-Critic,on-policy的结构详见论文。
- DPG:DPG中提供了确定性策略梯度的计算公式和证明。
- DQN:DDPG中借鉴了DQN的experience replay和target network。target network的具体实现与DQN略有不同,DDPG论文中的actor和critic的两个target network以小步长滞后更新,而非隔C步更新。都是为了解决模型训练稳定性问题,大同小异吧。
- Noise sample:连续动作空间的RL学*的一个困难时action的探索。DDPG中通过在action基础上增加Noise方式解决这个问题。

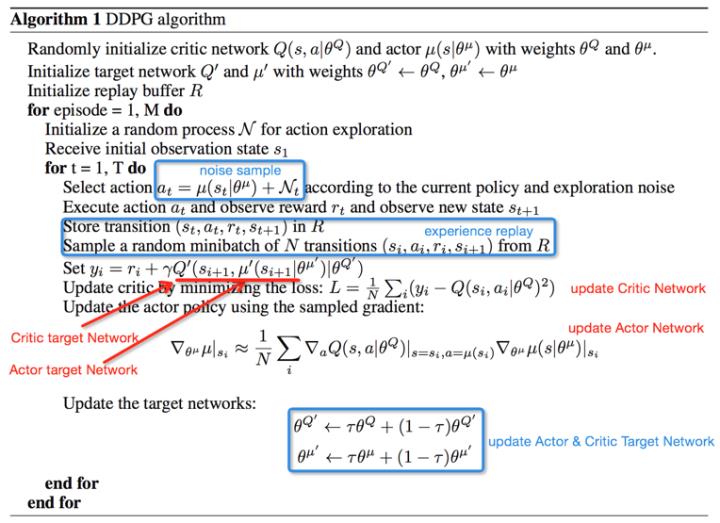
DDPG的算法训练过程:
四、some state-of-art papers
写到这整个文章有点太长了,这部分会拆分到后续单独开辟文章介绍。简单介绍下大名鼎鼎的A3C算法。
4.1 Asynchronous Advantage Actor-Critic (A3C)
因为后续还有计划A3C和Advantage结合在一起分享下。这里只是大体理一下A3C的主要思路。
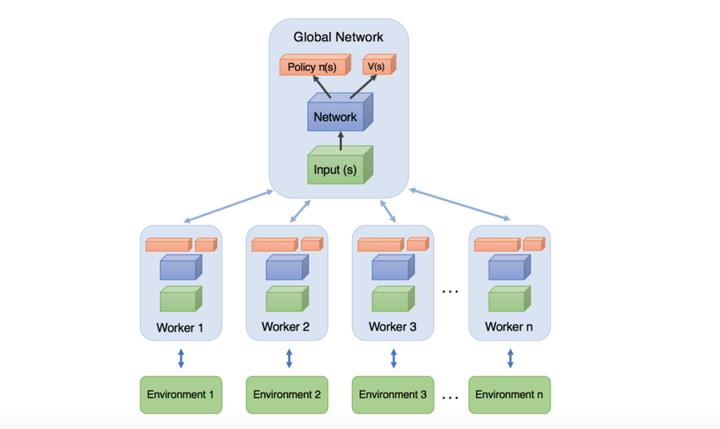
- asynchronous:异步,对应的异步分布式RL框架。相对应的是15年google的Gorila平台Massively Parallel Methods for Deep Reinforcement Learning,Gorilla采用的不同机器,同一个PS。而A3C中,则是同一台机器,多核CPU,降低了参数和梯度的传输成本,论文里验证迭代速度明显更快。并且更为重要的是,它是采用同机多线程的actor-learner对,每个线程对应不同的探索策略,总体上看样本间是低相关的,因此不再需要DQN中引入experience replay机制来进行训练。这样能够采用on-policy的方法进行训练。此外,训练中采用的是CPU而非GPU,原因是RL在训练过程中batch一般很小,GPU在等待新数据时空闲很多。附异步方法抽象的架构图见下:
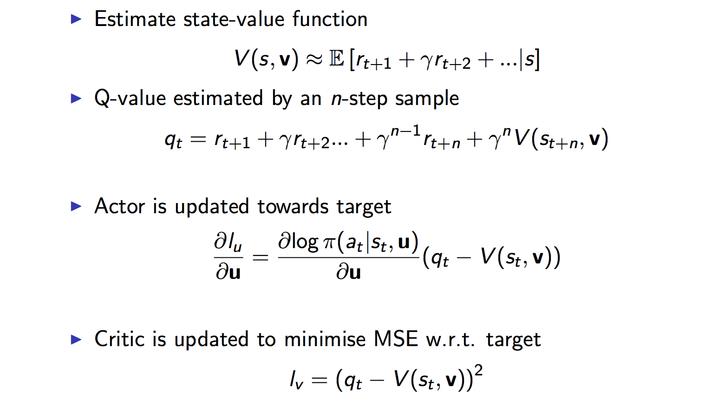
- Advantage Actor-Critic:和DDPG架构类似,actor网络的梯度:
![]()
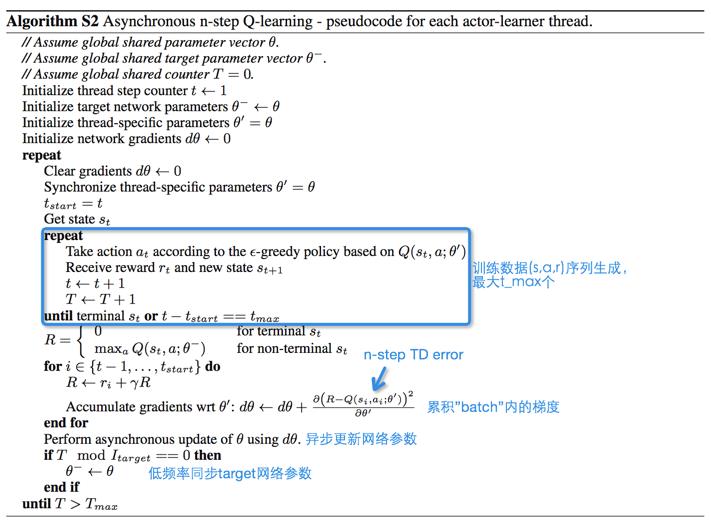
与DDPG不同的是A3C利用的是max(Advantage)而非max(Q),其中是利用n-steps TD error进行更新的,即:
![]()
具体过程见下图:
n-step Q-learning A3C算法训练过程:
4.2 Trust Region Policy Optimization(TRPO)and action embedding and ...
16年Berkeley大学的论文 Trust Region Policy Optimization,核心在于学*的可信度,提高模型稳定性。
超大规模离散动作空间的action embedding的paperDeep Reinforcement Learning in Large Discrete Action Spaces。核心贡献是引入action embedding,具体做法是将离散动作embedding到连续的小空间中,设计很巧妙,读这篇论文前也有类似思路,可以用到搜索推荐这些领域。
其他前沿文章和专题,比如16年NIPS BestPaper Value Iteration Networks(安利下新朋友iker的分享:强化学*系列三- Value iteration Network)以及又是Silver大神16年的Fictitious Self-Play Deep Reinforcement Learning from Self-Play in Imperfect-Information Games等,留待后面文章再仔细分解了。
五、some words
一点点感触,平时很少写文章,平时要学的东西很多项目也很busy,时间真心不多...但写到这里反而发现,能够把学*思考实践的内容通过写作呈现出来,还是有些不同于单独读paper做实验的收获,写作的过程会加深对细节的理解,也能从更系统更全面视角看待问题,后续会继续多po一些前沿专题和实现象,继续保持更新,各位看官多多支持哈。DRL是一个非常有意思的方向,欢迎多多交流指导,DRL领域的发展也是日新月异,生活在这样一个信息革命大变革时代也是我们的幸运。anyway,最重要的是开心,加油吧~
最后安利下我们team的招聘,对淘宝搜索排序感兴趣的同学欢迎邮件我 qingsong.huaqs@taobao.com,来淘宝,一起成长!
以上是关于深度强化学习(Deep Reinforcement Learning)入门:RL base & DQN-DDPG-A3C introduction的主要内容,如果未能解决你的问题,请参考以下文章
深度强化学习(Deep Reinforcement Learning)入门:RL base & DQN-DDPG-A3C introduction
Deep Learning and Reinforcement Learning Summer School 2018
18 Issues in Current Deep Reinforcement Learning from ZhiHu
repost: Deep Reinforcement Learning
Deep Reinforcement Learning for Visual Object Tracking in Videos 论文笔记