机电传动控制第二周学习笔记
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了机电传动控制第二周学习笔记相关的知识,希望对你有一定的参考价值。
这周结合老师讲的内容还有发下来的资料以及自己的网上查阅,对电机传动控制又有来新的认识。
首先是老师上课讲的机电传动系统的平衡以及直流电机的基本工作原理及结构,都比较容易接受和理解,尤其是老师在黑板上提到的一个对机电传动的整体的流程框图,个人感觉对理解很有帮助,但是我上课时候没有听清楚,所以很遗憾,还需要继续向老师和同学讨教。还有一点感受很明显需要前面的电学等物理知识的储备,以及对物理模型平衡的理解。电动机和发电机其实本质都是一样的,只不过用来选择的主动元素和被动元素不同。
再一个是对电机发展历史的了解和探索,资料中给出了电机是怎么一步步逐渐走进生活,代替一些动力,转换一些能量。而在我的课外查阅中,给我很大吸引的是现在很出名的特斯拉Tesla:特斯拉致力于用最具创新力的技术,加速可持续交通的发展。特斯拉在技术上为实现可持续能源供应提供了高效方式,减少全球交通对石油类的依赖;通过开放专利以及与其它汽车厂商合作,大力推动了纯电动汽车在全球的发展.而电机和机电传动正是其所需要好好研究突破的地方。
然后是老师给的基于功率交换的机电系统物理建模思想与方法的资料,个人理解就像是物理里面学的量纲一样,通过转换将系统中的物理量转化为功率然后将子系统一个个连接起来成为一个新的系统,以达到平衡,和量纲转化分析其实有着相似的地方。然后里面的内容其实也不是特别清楚,理解起来有些还是比较晦涩。
最后是关于modelica的学习:
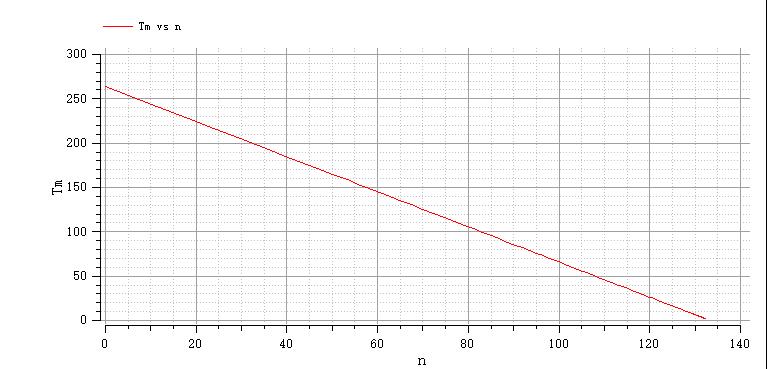
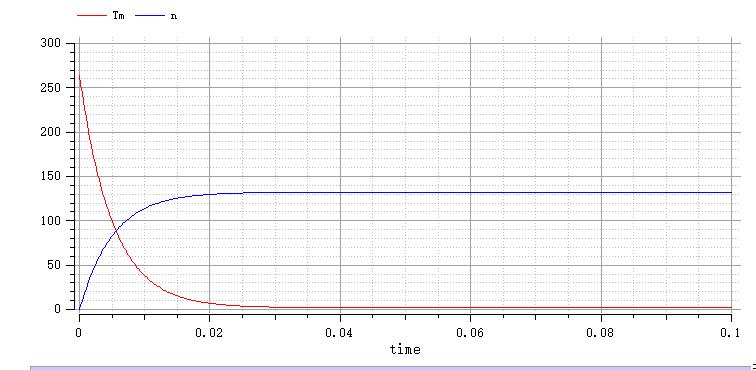
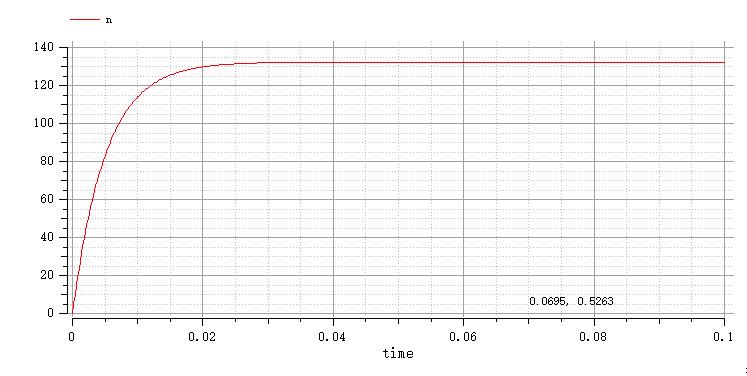
老师给出的两个模型,先是motor1,三个方程三个未知数,我修改了一些参数R和u
model motor1
Real Tm;
Real n;
Real i;
parameter Real J = 0.01;
parameter Real R = 0.5;
parameter Real Kt = 1.1;
parameter Real Ke = 0.9;
parameter Real Tl = 2;
parameter Real u = 120;
equation
Tm-Tl = J * der(n);
Tm= Kt * i;
u= i * R + Ke * n;
end motor1;
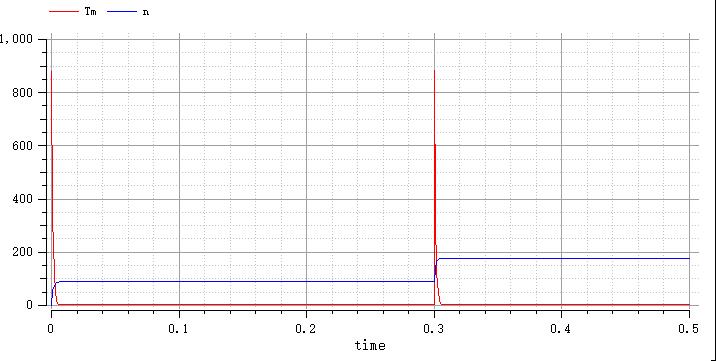
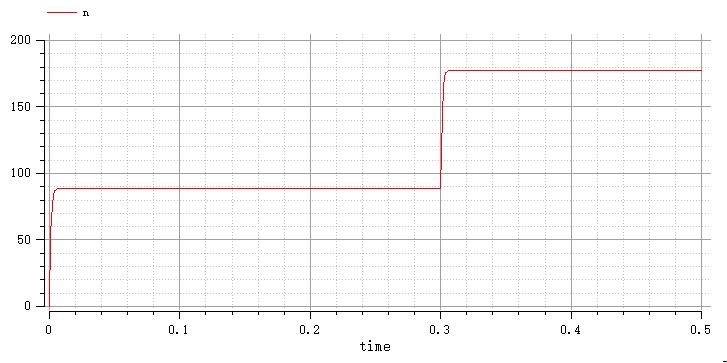
后一个motor2则是三个方程,四个未知数。并且做了一下电机外部电压的跳变,时间在0.1前后的电压不同,带来电机相应不同,存在跳变。这里我修改了一下跳变时间及前后电压值
model motor1
Real Tm;
Real n;
Real i;
Real u;
parameter Real J = 0.01;
parameter Real R = 0.1;
parameter Real Kt = 1.1;
parameter Real Ke = 0.9;
parameter Real Tl = 2;
equation
if time <= 0.3 then
u = 80;
else
u = 160;
end if;
Tm-Tl = J * der(n);
Tm= Kt * i;
u= i * R + Ke * n;
end motor1;
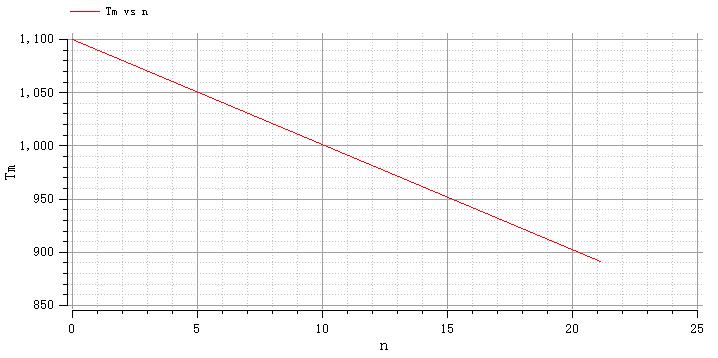
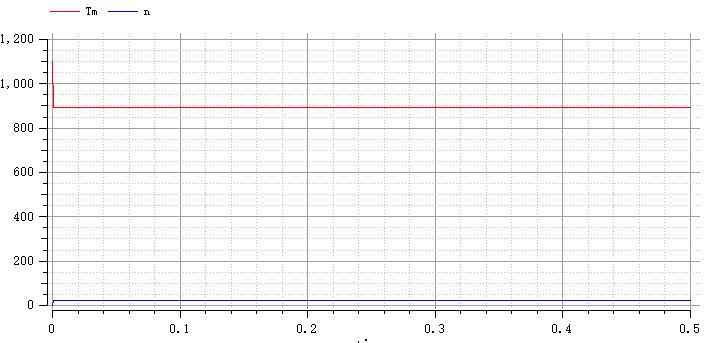
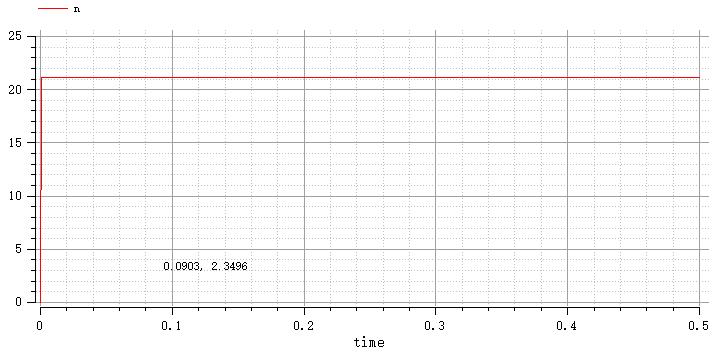
我自己增加了Tl 作为变量,增加了一个方程,然后重新画图
model motor1
Real Tm;
Real n;
Real i;
Real Tl;
parameter Real J = 0.01;
parameter Real R = 0.1;
parameter Real Kt = 1.1;
parameter Real Ke = 0.9;
parameter Real u = 100;
equation
Tm-Tl = J * der(n);
Tl = 2*n*n;
Tm= Kt * i;
u= i * R + Ke * n;
end motor1;
以上是关于机电传动控制第二周学习笔记的主要内容,如果未能解决你的问题,请参考以下文章