A* 寻路学习
Posted 志不强者智不达
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了A* 寻路学习相关的知识,希望对你有一定的参考价值。
启发式搜索:启发式搜索就是在状态空间中的搜索.对每一个搜索的位置进行评估,得到最好的位置,再从这个位置进行搜索直到目标.这样可以省略大量无谓的搜索路径,提高了效率.在启发式搜索中,对位置的估价是十分重要的,采用了不同的估价可以有不同的效果
在启发式搜索中,对位置的估价是十分重要的.采用了不同的估价可以有不同的效果
估价函数:从当前节点移动到目标节点的预估费用:这个估计就是启发式的.在寻路问题和迷宫问题中,我们通常用曼哈顿(manhattan)估价函数预计费用
A*算法的特点:A*算法在理论伤是时间最优的,但是也有缺点:它的空间增长是指数级别的.(优化:二叉堆)
开启列表:待检查方格的集合列表,寻找周围可以达到的点,加入到此表中, 并保存中心点为父节点
关闭列表:列表中保存不需要再次检查的方格
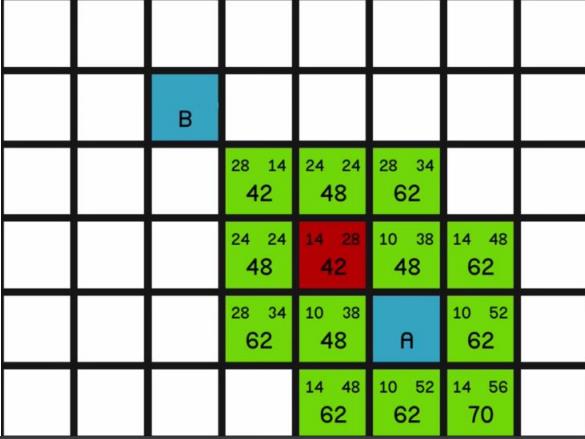
G 从起始节点到当前节点的距离
H 从当前节点到目标节点的估计距离
F = G + H
F,G和H的评分被写在每个方格里.正如在紧挨起始格右侧的方格所表示的,F被打印中间,G在左上角,H则在右上角
搜索过程:
1:把起始格添加到开启列表(openlist)
2:寻找起点周围所有可到达或者可通过的方格,把他们加入开启列表.
3:从开启列表中删除点A,把它加入到一个关闭列表(closedlist),列表中保存所有不需要再次检查的方格.
4:把当前格子从开启列表中删除,然后添加到关闭列表中.
5:检查所有相邻格子.跳过那些已经在关闭列表中的或者不可通过的,把他们添加进开启列表.把选中的方格作为新的方格的父节点.
6:如果某个相邻格已经在开启列表里了,检查现在的这条路径G值是否会更低一些.如果新的G值更低,那就把相邻方格的父节点改为目前选中的方格,重新计算F和G的值。
步骤总结:
1:把起始格添加到开启列表.
2:重复如下的工作:
a) 寻找开启列表中F值最低的格子.我们称它为当前格.
b) 把它切换到关闭列表.
c) 对相邻的格中的每一个
* 如果它不可通过或者已经在关闭列表中,略过它.反之如下.
* 如果它不在开启列表中,把它添加进去.把当前格作为这一格的父节点.记录从起始点经过当前格的这一格的G,H,和F值.
* 如果它已经在开启列表中,用G值为参考检查新的路径是否更好.更低的G值意味着更好的路径.
如果是这样,就把这一格的父节点改成当前格,并且重新计算这一格的G和F值.
d) 停止,当你
* 把目标格添加进了关闭列表,这时候路径被找到
* 没有找到目标格,开启列表已经空了.这时候,路径不存在.
3.保存路径.从目标格开始,沿着每一格的父节点移动直到回到起始格.
算法实现:
开启集合(openlist)
关闭集合(closedlist)
添加起始点到开始集合中
循环如下步骤:
当前点=开启集合中最小F_Cost的点
将当前点移出开启集合中
将当前点添加到关闭集合中
如果当前点是目标点,结束查询
遍历当前点的每个相邻点
如果相邻点不能访问或者相邻点在关闭集合中,跳过此相邻点
如果新路径到相邻点的距离更短,或者相邻点不在开启集合中
重新设置F_Cost
重新设置其父节点为当前点
如果相邻点不在开启集合中
添加相邻点到开启集合中


1 /* 2 脚本名称: 3 脚本作者: 4 建立时间: 5 脚本功能: 6 版本号: 7 */ 8 using UnityEngine; 9 using System.Collections; 10 11 namespace VoidGame { 12 13 /// <summary> 14 /// 节点,寻路的最小单位 15 /// </summary> 16 public class Node { 17 /// <summary> 18 /// 节点是否可以通过 19 /// </summary> 20 public bool m_canWalk; 21 /// <summary> 22 /// 节点的位置 23 /// </summary> 24 public Vector3 m_position; 25 /// <summary> 26 /// 节点在网格行(x轴)中的位置 27 /// </summary> 28 public int m_gridX; 29 /// <summary> 30 /// 节点在网格列(z轴)中的位置 31 /// </summary> 32 public int m_gridY; 33 34 /// <summary> 35 /// 从起始点当前节点的距离 36 /// </summary> 37 public int m_gCost; 38 /// <summary> 39 /// 从当前节点到目标节点的预估距离 40 /// </summary> 41 public int m_hCost; 42 /// <summary> 43 /// f = g + h 44 /// </summary> 45 public int m_fCost { 46 get { 47 return m_gCost + m_hCost; 48 } 49 } 50 51 /// <summary> 52 /// 父节点 53 /// </summary> 54 public Node m_nodeParent; 55 56 57 public Node(bool canWalk,Vector3 position,int x,int y) { 58 m_canWalk = canWalk; 59 m_position = position; 60 m_gridX = x; 61 m_gridY = y; 62 } 63 64 } 65 }
1 /* 2 脚本名称: 3 脚本作者: 4 建立时间: 5 脚本功能: 6 版本号: 7 */ 8 using UnityEngine; 9 using System.Collections; 10 using System.Collections.Generic; 11 12 namespace VoidGame { 13 /// <summary> 14 /// 节点组成的网格 15 /// </summary> 16 public class Grid : MonoBehaviour { 17 /// <summary> 18 /// 节点网格数组 19 /// </summary> 20 private Node[,] m_nodeGrid; 21 /// <summary> 22 /// 整个网格的大小 23 /// </summary> 24 public Vector2 m_gridSize; 25 /// <summary> 26 /// 网格行(x轴)包含的节点数量 27 /// </summary> 28 public int m_gridNodeCountX; 29 /// <summary> 30 /// 网格列(z轴)包含的节点数量 31 /// </summary> 32 public int m_gridNodeCountY; 33 /// <summary> 34 /// 节点半径 35 /// </summary> 36 public float m_nodeRadius; 37 /// <summary> 38 /// 节点直径 39 /// </summary> 40 private float m_nodeDiameter; 41 42 /// <summary> 43 /// 节点不可走的层 44 /// </summary> 45 public LayerMask m_unWalkableLayer; 46 47 /// <summary> 48 /// 玩家 49 /// </summary> 50 public Transform m_startTransform; 51 52 /// <summary> 53 /// 从起点到终点的路径节点列表 54 /// </summary> 55 public List<Node> m_pathNodeList = new List<Node>(); 56 57 58 private void Start() { 59 //计算节点直径 60 m_nodeDiameter = m_nodeRadius * 2; 61 //计算网格行(x轴)中的节点数量 62 m_gridNodeCountX = Mathf.RoundToInt(m_gridSize.x / m_nodeDiameter); 63 //计算网格列(z轴)中的节点数量 64 m_gridNodeCountY = Mathf.RoundToInt(m_gridSize.y / m_nodeDiameter); 65 //设置节点网格数组的大小 66 m_nodeGrid = new Node[m_gridNodeCountX,m_gridNodeCountY]; 67 68 CreateNodeGrid(); 69 } 70 71 private void Update() { 72 73 } 74 75 private void OnDrawGizmos() { 76 77 //画节点网格包围框 78 Gizmos.DrawWireCube(transform.position,new Vector3(m_gridSize.x,1,m_gridSize.y)); 79 //节点网格为空,直接返回 80 if(m_nodeGrid == null) { 81 return; 82 } 83 84 //遍历节点网格数组 85 foreach(var node in m_nodeGrid) { 86 //可以行走的网格颜色为白色,不可行走的网格颜色为红色 87 Gizmos.color = node.m_canWalk == true ? Color.white : Color.red; 88 //Gizmos视图中用比节点稍小的cube表示一个节点,便于观察 89 Gizmos.DrawCube(node.m_position,Vector3.one * (m_nodeDiameter - 0.1f)); 90 } 91 92 //获取起始节点 93 Node m_startNode = GetNodeFromPosition(m_startTransform.position); 94 95 //如果路径列表不为空 96 if(m_pathNodeList != null) { 97 //画出路线 98 foreach(var node in m_pathNodeList) { 99 Gizmos.color = Color.black; 100 Gizmos.DrawCube(node.m_position,Vector3.one * (m_nodeDiameter - 0.1f)); 101 } 102 } 103 104 //如果起始节点不为空并且起始节点可以走 105 if(m_startNode != null && m_startNode.m_canWalk) { 106 Gizmos.color = Color.cyan; 107 Gizmos.DrawCube(m_startNode.m_position,Vector3.one * (m_nodeDiameter - 0.1f)); 108 } 109 } 110 111 /// <summary> 112 /// 创建节点网格 113 /// </summary> 114 private void CreateNodeGrid() { 115 //获取起始点,为网格的左下 116 Vector3 startPosition = new Vector3(transform.position.x - m_gridSize.x / 2,0,transform.position.y - m_gridSize.y / 2); 117 //从左到右,从下到上生成节点 118 for(int i = 0;i < m_gridNodeCountY;i++) { 119 for(int j = 0;j < m_gridNodeCountX;j++) { 120 Vector3 nodePosition = new Vector3(startPosition.x + i * m_nodeDiameter + m_nodeRadius,0,startPosition.z + j * m_nodeDiameter + m_nodeRadius); 121 //检测以节点半径为半径的球形范围内是否有属于m_unWalkableLayer的物体 122 bool canWalk = !Physics.CheckSphere(nodePosition,m_nodeRadius,m_unWalkableLayer); 123 //根据检测的结果节点是否为可走 124 m_nodeGrid[i,j] = new Node(canWalk,nodePosition,i,j); 125 } 126 } 127 } 128 129 /// <summary> 130 /// 根据所在位置获得位置所在的节点 131 /// </summary> 132 /// <param name="position">所在位置</param> 133 /// <returns></returns> 134 public Node GetNodeFromPosition(Vector3 position) { 135 //获取位置所在网格行(x轴)上的比例 136 float percentX = (position.x + m_gridSize.x / 2) / m_gridSize.x; 137 //获取位置所在网格列(z轴)上的比例 138 float percentY = (position.z + m_gridSize.y / 2) / m_gridSize.y; 139 //确保行百分比和列百分比在0-1之间 140 percentX = Mathf.Clamp01(percentX); 141 percentY = Mathf.Clamp01(percentY); 142 143 //四舍五入网格行上的比例,获得在网格行中的节点位置 144 int x = Mathf.RoundToInt((m_gridNodeCountX - 1) * percentX); 145 //四舍五入网格列上的比例,获得在网格列中的节点位置 146 int y = Mathf.RoundToInt((m_gridNodeCountY - 1) * percentY); 147 148 //通过行位置和列位置确定要返回的节点 149 return m_nodeGrid[x,y]; 150 } 151 152 /// <summary> 153 /// 获取节点的邻居 154 /// </summary> 155 /// <param name="node">节点</param> 156 /// <returns></returns> 157 public List<Node> GetNeighbors(Node node) { 158 List<Node> neighbourNodeList = new List<Node>(); 159 for(int i = -1;i <= 1;i++) { 160 for(int j = -1;j <= 1;j++) { 161 //i==0&&j==0 表示是自身,不添加 162 if(i == 0 && j == 0) { 163 continue; 164 } 165 //从左到右 166 int tempX = node.m_gridX + j; 167 //从下到上 168 int tempY = node.m_gridY + i; 169 //限制x,0 < x < m_gridNodeCountX 170 //限制y,0 < y < m_gridNodeCountY 171 //满足以上条件,将节点周围的8个节点添加到节点的邻居节点列表 172 if(tempX > 0 && tempX < m_gridNodeCountX && tempY > 0 && tempY < m_gridNodeCountY) { 173 neighbourNodeList.Add(m_nodeGrid[tempX,tempY]); 174 } 175 } 176 } 177 178 return neighbourNodeList; 179 } 180 } 181 }
1 /* 2 脚本名称: 3 脚本作者: 4 建立时间: 5 脚本功能: 6 版本号: 7 */ 8 using UnityEngine; 9 using System.Collections; 10 using System.Collections.Generic; 11 12 namespace VoidGame { 13 14 public class FindPath : MonoBehaviour { 15 /// <summary> 16 /// 起点 17 /// </summary> 18 public Transform m_start; 19 /// <summary> 20 /// 目标 21 /// </summary> 22 public Transform m_target; 23 24 /// <summary> 25 /// 要寻路的网格 26 /// </summary> 27 private Grid m_grid; 28 29 private void Start() { 30 m_grid = GetComponent<Grid>(); 31 } 32 33 private void Update() { 34 FindingPath(m_start.position,m_target.position); 35 } 36 37 /// <summary> 38 /// 寻路 39 /// </summary> 40 /// <param name="startPosition">起始位置</param> 41 /// <param name="endPosition">结束位置</param> 42 private void FindingPath(Vector3 startPosition,Vector3 endPosition) { 43 //起始节点 44 Node startNode = m_grid.GetNodeFromPosition(startPosition); 45 //结束节点 46 Node endNode = m_grid.GetNodeFromPosition(endPosition); 47 48 //待检查的节点列表 49 List<Node> openlist = new List<Node>(); 50 //已检查的节点列表 51 HashSet<Node> closeList = new HashSet<Node>(); 52 53 //添加起始节点到待检查的列表 54 openlist.Add(startNode); 55 56 //如果待检查的列表的数量大于0 57 while(openlist.Count > 0) { 58 //设置当前节点为待检查节点列表的第一个节点 59 Node currentNode = openlist[0]; 60 61 //遍历待检查的列表 62 for(int i = 0;i < openlist.Count;i++) { 63 //如果 待检查节点的f小于当前节点的f 或者 64 // 待检查节点的f等于当前节点的f并且待检查节点的h小于当前节点的h 65 //将当前节点设置为待检查节点 66 if(openlist[i].m_fCost < currentNode.m_fCost || 67 openlist[i].m_fCost == currentNode.m_fCost && openlist[i].m_hCost < currentNode.m_hCost) { 68 currentNode = openlist[i]; 69 } 70 } 71 72 //从待检查列表中移除当前节点 73 openlist.Remove(currentNode); 74 //添加当前节点到已检查节点列表 75 closeList.Add(currentNode); 76 77 //如果当前节点等于终端节点,生成从当前节点到终端节点的路径 78 if(currentNode == endNode) { 79 GeneratePath(startNode,endNode); 80 } 81 82 //遍历当前节点的邻居节点 83 foreach(var node in m_grid.GetNeighbors(currentNode)) { 84 //如果邻居节点不能走或者待检查列表里包含邻居节点,不处理 85 if(!node.m_canWalk || closeList.Contains(node)) { 86 continue; 87 } 88 89 //获得新的g.为当前节点的g + 当前节点到邻居节点的距离 90 int newgCost = currentNode.m_gCost + GetDistanceBetweenNodes(currentNode,node); 91 92 //如果新g 小于 邻居节点的g 或者 待检查列表不包括邻居节点 93 if(newgCost < node.m_gCost || !openlist.Contains(node)) { 94 //邻居节点的g等于新的g 95 node.m_gCost = newgCost; 96 //邻居节点的h等于邻居节点到终端节点的距离 97 node.m_hCost = GetDistanceBetweenNodes(node,endNode); 98 //设置邻居节点的父节点为当前节点 99 node.m_nodeParent = currentNode; 100 //如果待检查节点列表不包括当前节点 101 if(!openlist.Contains(currentNode)) { 自动寻路之A星算法+Qt开发图形界面