基于Qt搭建ROS开发环境
Posted LeonHuo
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于Qt搭建ROS开发环境相关的知识,希望对你有一定的参考价值。
参考的博客:
http://blog.csdn.net/u013453604/article/details/52186375
http://blog.csdn.net/dxuehui/article/details/44647861
1. Qt插件ros_qtc_plugin安装
使用ros-industrial的Levi-Armstrong在2015年12月开发的一个 Qt插件ros_qtc_plugin,这个插件使得Qt"新建项目"和"新建文件"选项中出现ROS的相关选项,可以直接在Qt下创建、编译、调 试ROS项目,也可以直接在Qt项目中添加ROS的package、urdf、launch。
apt-get方式安装:(Levi-Armstrong更新了插件安装方式,现在可以添加他的源直接用apt-get方式安装,Ubuntu 14.04)
sudo add-apt-repository ppa:beineri/opt-qt57-trusty
sudo add-apt-repository ppa:levi-armstrong/ppa
sudo apt-get update && sudo apt-get install qt57creator-plugin-ros
若上述安装运行正常,可略过下面步骤。
(1)下载安装Qt5.7.0
1)打开链接http://blog.csdn.net/u013453604/article/details/52186375,选择国内的高速源下载。
2)下载下来的qt-opensource-linux-x64-5.7.0.run ,右键"属性"——"权限"勾选"允许作为程序执行文件",再双击安装。安装路径选择/home/ubuntu/Qt5.7.0(其中ubuntu为系统名,根据实际情况更改),安装后出现Qt5.7.0文件夹。
(2)修改系统配置文件让Qt启动器选择新版的Qt Creator
sudo gedit /usr/lib/x86_64-linux-gnu/qt-default/qtchooser/default.conf
原始:
/usr/lib/x86_64-linux-gnu/qt5/bin
/usr/lib/x86_64-linux-gnu
更改为:
/home/ubuntu/Qt5.7.0/5.7/gcc_64/bin
/home/ubuntu/Qt5.7.0/5.7/gcc_64/lib
注意:/home/ubuntu为主文件夹绝对路径,需根据实际系统名称更改。
如果多个Qt版本共存,而你修改上述文件仍无法进行编译,报错有类似下面的
make: *** 没有规则可以创建目标"clean"。 停止。
Project MESSAGE: Cannot build Qt Creator with Qt version 5.2.1.
Project ERROR: Use at least Qt 5.5.0.
make: *** 没有指明目标并且找不到 makefile。 停止。
那么要到/usr/lib/x86_64-linux-gnu/ 下看看到底有几个qtchooser,并修改所有的qtchooser/default.conf
(3)运行Qt Creator配置脚本
下载脚本setup.sh (打开上述博客链接,并下载),把它放在主目录/home/ubuntu下。
1)运行前需修改
Setup.sh中的 QMAKE_PATH需要修改:
原始:
QMAKE_PATH=/opt/qt57/bin/qmake
修改为:
QMAKE_PATH=/home/ubuntu/Qt5.7.0/5.7/gcc_64/bin/qmake
注意:/home/ubuntu为主文件夹绝对路径,需根据实际系统名称更改。
Setup.sh脚本中有个路径需要根据实际情况修改,如果ubuntu是英文版可以不用管,如果是中文版的系统,桌面文件夹名字不是Desktop而是"桌面",就要修改setup.sh文件中的第84行,原文是
rm -f $HOME/Desktop/QtCreator.desktop
ln -s $DESKTOP_FILE $HOME/Desktop/QtCreator.desktop12
改成
rm -f $HOME/桌面/QtCreator.desktop
ln -s $DESKTOP_FILE $HOME/桌面/QtCreator.desktop12
在桌面生成一个名为QtCreator.desktop的快捷方式,用这个快捷方式打开Qt就可以正常使用ros_qtc_plugin插件。
2)打开终端运行
cd ~
bash setup.sh -u
运行完成无错误则安装成功。
注意:
1)从github下载一个新版的Qt Creator源码并重新编译时间很长,建议运行FQ软件Lantern,以加快下载速度。
2)bash setup.sh -u 命令前面不需要加sudo 否则编译过程中新建的文件夹和桌面的Qt快捷方式都属于root用户,不用命令行你是无法修改和删除。
运行上述命令时在/home/ubuntu下生成qtc_plugins文件夹,其中包含下载的qt-creator和ros_qtc_plugin。
3)上述博客中"国内访问github网速太慢,从Qt官网下载Qt Creator 4.0.3的源码放在qtc_plugins文件夹下"运行的方式验证后发现问题,运行bash setup.sh -u后出现很多错误,不建议使用。
(4)出现错误
如果提示"fatal error: qtermwidget5/qtermwidget.h: No such file or directory",则需要到:http://github.com/lxde/qtermwidget 下载qtermwidget-master,并安装。
安装qtermwidget-master需要升级cmake,网络上升级cmake的方案主要3种:
1). (推荐)下载安装
sudo apt-get install build-essential
wget http://www.cmake.org/files/v3.7/cmake-3.7.1.tar.gz
tar xf cmake-3.7.1.tar.gz
cd cmake-3.7.1
./configure
make
sudo make install
2). 使用PPA
sudo apt-get install software-properties-common
sudo add-apt-repository ppa:george-edison55/cmake-3.x
sudo apt-get update
• 若没有安装cmake,则
sudo apt-get instal cmake
• 若已经安装了cmake,则
sudo apt-get upgrade
这样做新版本cmake有些链接找不到导致无法安装。
3). 卸载
apt-get autoremove cmake
千万不能这样做,否则你的ROS中好多组件跟着一起卸载了。
采用方案1安装完成后运行
cmake --version
可能出现CMake Error: Could not find CMAKE_ROOT !!!
这是因为cmake的文件夹会变化,变为:/usr/local/share/,所以需要输入
export CMAKE_ROOT=/usr/local/share/
查看:echo $CMAKE_ROOT
这时就可以编译qtermwidget
解压qtermwidget-master.zip之后,首先修改CMakeLists.txt,找到
include_directories(
"${CMAKE_SOURCE_DIR}/lib"
"${CMAKE_BINARY_DIR}/lib"
"${CMAKE_BINARY_DIR}"
)
add_definitions(-Wall)在其下面添加:
set(CMAKE_PREFIX_PATH "/home/leon/Qt5.7.0/5.7/gcc_64/"),注意修改路径。保存,并运行
cmake .
make
sudo make install
如果不添加会出现错误
CMake Warning at CMakeLists.txt:5 (FIND_PACKAGE):
By not providing "FindQt5Widgets.cmake" in CMAKE_MODULE_PATH this project
has asked CMake to find a package configuration file provided by
"Qt5Widgets", but CMake did not find one.
Could not find a package configuration file provided by "Qt5Widgets" with
any of the following names:
Qt5WidgetsConfig.cmake
qt5widgets-config.cmake
Add the installation prefix of "Qt5Widgets" to CMAKE_PREFIX_PATH or set
"Qt5Widgets_DIR" to a directory containing one of the above files. If
"Qt5Widgets" provides a separate development package or SDK, be sure it has
been installed.
运行完成后,在运行:
cd ~
bash setup.sh -u
运行无错误后,双击桌面qt图标,如果出现libqtermwidget5.so.0: cannot open shared object file: No such file or directory。这个文件在/usr/local/lib/文件下,所以输入
export LD_LIBRARY_PATH=/where/you/install/lib:$LD_LIBRARY_PATH
sudo ldconfig
可以解决。
1) "File"—"New File or Project",选择"Import Project"—"Import ROS Workspace"—"choose"


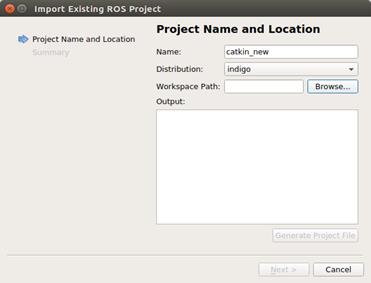

3)出现一个对话框,询问新建的工作空间未被初始化,是否执行初始化,选择"yes"
这里相当于执行一次catkin_init_workspace命令,使工作空间初始化.

4) 点击下方的"Generate Project File",再点击"Next" 
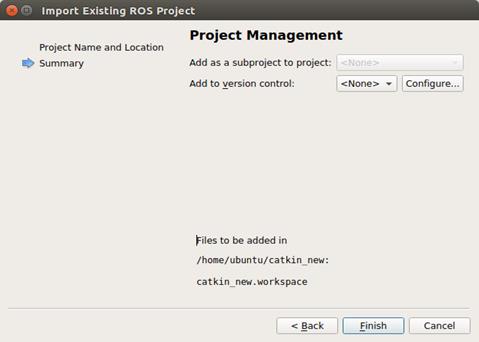
5) 在"Project Management"步骤可以配置版本控制系统,将"Add to version control"中的"Git"修改为"<None>",然后执行"Finish"。

1) 在catkin_new下面的src上右键单击,选择"Add New...",如下图
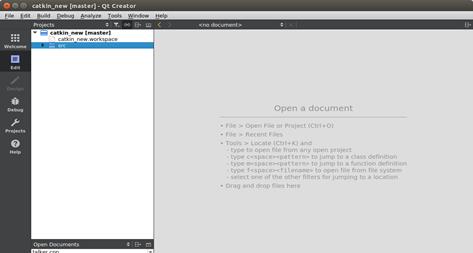
2) 然后选择"ROS"——"package"——"choose"

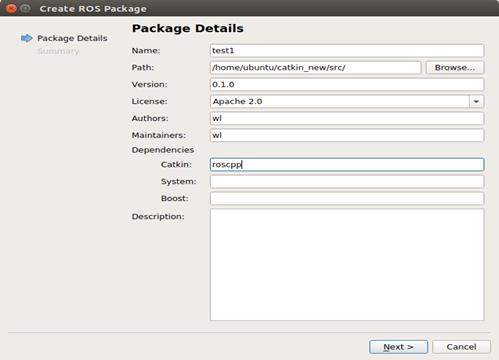
4) 在"Project Management"步骤可以配置版本控制系统,将"Add to version control"中的"Git"修改为"<None>",然后执行"Finish"。

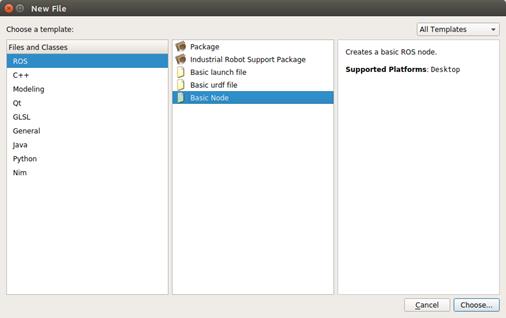
1)目前这个package还是空的,没有任何节点。在test1的src文件夹上右键单击,选择"Add New...".

2) 选择"ROS"——"Basic Node"——"choose",创建一个节点,也就是新建一个.cpp文件
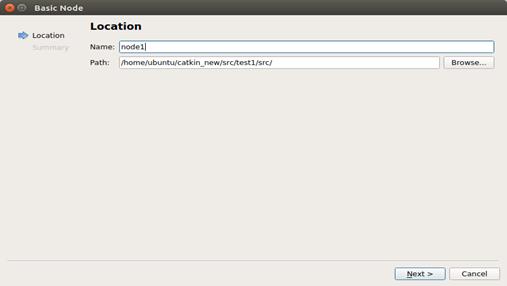
3) 节点名称写为"node1",则生成一个名为node1.cpp的源文件
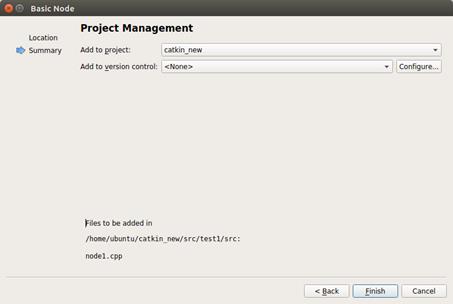
4) 在"Project Management"步骤可以配置版本控制系统,将"Add to version control"中的"Git"修改为"<None>",然后执行"Finish"。
用ROS模板新建的node1.cpp的源文件如下图,是自动生成的一个Hello World程序.

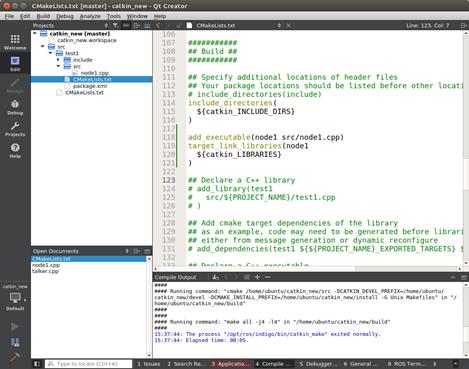
为了编译成可执行文件,还需要编辑test1的makefile。为test1的CMakeLists.txt加上下面几行,意思是把node1.cpp编译成名为node1的节点。
add_executable(node1 src/node1.cpp)

修改完CMakeLists.txt之后点击Qt左下角的锤子图标"构建项目catkin_new",点击底边栏的"4 编译输出"可以看到编译结果,如下图:
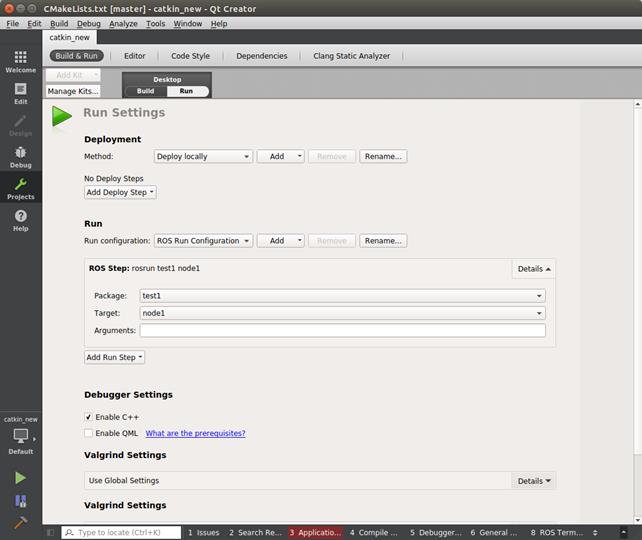
1) 运行节点需要修改运行配置,点击左侧栏的"Projects",在"Build Settings"页的"Edit build configuration"一栏选择"Default";
3)点击Qt左下角的小电脑图标,选择"Default"的构建配置,再点击Qt左下角的绿色三角形即可运行"运行设置"页下面配置好的所有Step

用插件创建或导入ROS package之后还需要修改.workspace文件,如下图
<Directory>/opt/ros/indigo/include</Directory>
这样就可以使得Qt找到ros头文件,比如<ros/ros.h> ,头文件包含语句不再提示找不到文件,输入ros相关函数可以自动补全.

使从快捷方式启动Qt Creator的同时加载ROS环境变量,否则通过Cmakelists.txt导入的ROS工程运行时出现CMAKE_PREFIT_PATH找不到的错误,如下:
gedit /home/leon/.local/share/applications/Qt-Creator-ros.desktop
修改
Exec
变量一行,在中间添加 bash -i -c 即改为 Exec=bash -i -c /home/leon/qtc_plugins/qt-creator-build/bin/qtcreator ,注意修改路径,保存并退出。添加 bash -i -c 是为了在通过快捷方式启动Qt Creator的同时加载ROS环境变量(ROS环境变量加载脚本配置在
以上是关于基于Qt搭建ROS开发环境的主要内容,如果未能解决你的问题,请参考以下文章