求51单片机超声波避障程序
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了求51单片机超声波避障程序相关的知识,希望对你有一定的参考价值。
求51单片机超声波避障程序求大神发一个简单的带舵机超声波避障小车程序,万分感谢
这是一个超声波避障小车的源程序,可以参考下,用的89C52单片机,舵机控制转角避障。#include<AT89x51.H>
#include <intrins.h>
#define Sevro_moto_pwm P2_7 //接舵机信号端输入PWM信号调节速度
#define ECHO P2_4 //超声波接口定义
#define TRIG P2_5 //超声波接口定义
#define Left_moto_go P1_0=1,P1_1=0,P1_2=1,P1_3=0; //左边两个电机向前走
#define Left_moto_back P1_0=0,P1_1=1,P1_2=0,P1_3=1; //左边两个电机向后转
#define Left_moto_Stop P1_0=0,P1_1=0,P1_2=0,P1_3=0; //左边两个电机停转
#define Right_moto_go P1_4=1,P1_5=0,P1_6=1,P1_7=0; //右边两个电机向前走
#define Right_moto_back P1_4=0,P1_5=1,P1_6=0,P1_7=1; //右边两个电机向前走
#define Right_moto_Stop P1_4=0,P1_5=0,P1_6=0,P1_7=0; //右边两个电机停转
unsigned char const discode[] = 0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0xBF,0xff/*-*/;
unsigned char const positon[3]= 0xfe,0xfd,0xfb;
unsigned char disbuff[4] = 0,0,0,0,;
unsigned char posit=0;
unsigned char pwm_val_left = 0;//变量定义
unsigned char push_val_left =14;//舵机归中,产生约,1.5MS 信号
unsigned long S=0;
unsigned long S1=0;
unsigned long S2=0;
unsigned long S3=0;
unsigned long S4=0;
unsigned int time=0; //时间变量
unsigned int timer=0; //延时基准变量
unsigned char timer1=0; //扫描时间变量
/************************************************************************/
void delay(unsigned int k) //延时函数
unsigned int x,y;
for(x=0;x<k;x++)
for(y=0;y<2000;y++);
/************************************************************************/
void Display(void) //扫描数码管
if(posit==0)
P0=(discode[disbuff[posit]])&0x7f;//产生点
else
P0=discode[disbuff[posit]]; if(posit==0)
P2_1=0;P2_2=1;P2_3=1;
if(posit==1)
P2_1=1;P2_2=0;P2_3=1;
if(posit==2)
P2_1=1;P2_2=1;P2_3=0;
if(++posit>=3)
posit=0;
/************************************************************************/
void StartModule() //启动测距信号
TRIG=1;
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
TRIG=0;
/***************************************************/
void Conut(void) //计算距离
while(!ECHO); //当RX为零时等待
TR0=1; //开启计数
while(ECHO); //当RX为1计数并等待
TR0=0; //关闭计数
time=TH0*256+TL0; //读取脉宽长度
TH0=0;
TL0=0;
S=(time*1.7)/100; //算出来是CM
disbuff[0]=S%1000/100; //更新显示
disbuff[1]=S%1000%100/10;
disbuff[2]=S%1000%10 %10;
/************************************************************************/
//前速前进
void run(void)
Left_moto_go ; //左电机往前走
Right_moto_go ; //右电机往前走
/************************************************************************/
//前速后退
void backrun(void)
Left_moto_back ; //左电机往前走
Right_moto_back ; //右电机往前走
/************************************************************************/
//左转
void leftrun(void)
Left_moto_back ; //左电机往前走
Right_moto_go ; //右电机往前走
/************************************************************************/
//右转
void rightrun(void)
Left_moto_go ; //左电机往前走
Right_moto_back ; //右电机往前走
/************************************************************************/
//STOP
void stoprun(void)
Left_moto_Stop ; //左电机停走
Right_moto_Stop ; //右电机停走
/************************************************************************/
void COMM( void )
push_val_left=5; //舵机向左转90度
timer=0;
while(timer<=4000); //延时400MS让舵机转到其位置
StartModule(); //启动超声波测距
Conut(); //计算距离
S2=S;
push_val_left=23; //舵机向右转90度
timer=0;
while(timer<=4000); //延时400MS让舵机转到其位置
StartModule(); //启动超声波测距
Conut(); //计算距离
S4=S;
push_val_left=14; //舵机归中
timer=0;
while(timer<=4000); //延时400MS让舵机转到其位置 StartModule(); //启动超声波测距
Conut(); //计算距离
S1=S; if((S2<20)||(S4<20)) //只要左右各有距离小于20CM小车后退
backrun(); //后退
timer=0;
while(timer<=4000);
if(S2>S4)
rightrun(); //车的左边比车的右边距离小 右转
timer=0;
while(timer<=4000);
else
leftrun(); //车的左边比车的右边距离大 左转
timer=0;
while(timer<=4000);
/************************************************************************/
/* PWM调制电机转速 */
/************************************************************************/
/* 左电机调速 */
/*调节push_val_left的值改变电机转速,占空比 */
void pwm_Servomoto(void)
if(pwm_val_left<=push_val_left)
Sevro_moto_pwm=1;
else
Sevro_moto_pwm=0;
if(pwm_val_left>=200)
pwm_val_left=0;
/***************************************************/
///*TIMER1中断服务子函数产生PWM信号*/
void time1()interrupt 3 using 2
TH1=(65536-100)/256; //100US定时
TL1=(65536-100)%256;
timer++; //定时器100US为准。在这个基础上延时
pwm_val_left++;
pwm_Servomoto(); timer1++; //2MS扫一次数码管
if(timer1>=20)
timer1=0;
Display();
/***************************************************/
///*TIMER0中断服务子函数产生PWM信号*/
void timer0()interrupt 1 using 0
/***************************************************/ void main(void)
TMOD=0X11;
TH1=(65536-100)/256; //100US定时
TL1=(65536-100)%256;
TH0=0;
TL0=0;
TR1= 1;
ET1= 1;
ET0= 1;
EA = 1; delay(100);
push_val_left=14; //舵机归中
while(1) /*无限循环*/
if(timer>=1000) //100MS检测启动检测一次
timer=0;
StartModule(); //启动检测
Conut(); //计算距离
if(S<30) //距离小于20CM
stoprun(); //小车停止
COMM(); //方向函数
else
if(S>30) //距离大于,30CM往前走
run();
/**************************************************************************/
下面是头文件:
头文件(一)
/*--------------------------------------------------------------------------
AT89X51.H Header file for the low voltage Flash Atmel AT89C51 and AT89LV51.
Copyright (c) 1988-2002 Keil Elektronik GmbH and Keil Software, Inc.
All rights reserved.
--------------------------------------------------------------------------*/
#ifndef __AT89X51_H__
#define __AT89X51_H__
/*------------------------------------------------
Byte Registers
------------------------------------------------*/
sfr P0 = 0x80;
sfr SP = 0x81;
sfr DPL = 0x82;
sfr DPH = 0x83;
sfr PCON = 0x87;
sfr TCON = 0x88;
sfr TMOD = 0x89;
sfr TL0 = 0x8A;
sfr TL1 = 0x8B;
sfr TH0 = 0x8C;
sfr TH1 = 0x8D;
sfr P1 = 0x90;
sfr SCON = 0x98;
sfr SBUF = 0x99;
sfr P2 = 0xA0;
sfr IE = 0xA8;
sfr P3 = 0xB0;
sfr IP = 0xB8;
sfr PSW = 0xD0;
sfr ACC = 0xE0;
sfr B = 0xF0;
/*------------------------------------------------
P0 Bit Registers
------------------------------------------------*/
sbit P0_0 = 0x80;
sbit P0_1 = 0x81;
sbit P0_2 = 0x82;
sbit P0_3 = 0x83;
sbit P0_4 = 0x84;
sbit P0_5 = 0x85;
sbit P0_6 = 0x86;
sbit P0_7 = 0x87;
/*------------------------------------------------
PCON Bit Values
------------------------------------------------*/
#define IDL_ 0x01
#define STOP_ 0x02
#define PD_ 0x02 /* Alternate definition */
#define GF0_ 0x04
#define GF1_ 0x08 #define SMOD_ 0x80 /
*------------------------------------------------
TCON Bit Registers
------------------------------------------------*/
sbit IT0 = 0x88;
sbit IE0 = 0x89;
sbit IT1 = 0x8A;
sbit IE1 = 0x8B;
sbit TR0 = 0x8C;
sbit TF0 = 0x8D;
sbit TR1 = 0x8E;
sbit TF1 = 0x8F;
/*------------------------------------------------
TMOD Bit Values
------------------------------------------------*/
#define T0_M0_ 0x01
#define T0_M1_ 0x02
#define T0_CT_ 0x04
#define T0_GATE_ 0x08
#define T1_M0_ 0x10
#define T1_M1_ 0x20
#define T1_CT_ 0x40
#define T1_GATE_ 0x80
#define T1_MASK_ 0xF0
#define T0_MASK_ 0x0F
/*------------------------------------------------
P1 Bit Registers
------------------------------------------------*/
sbit P1_0 = 0x90;
sbit P1_1 = 0x91;
sbit P1_2 = 0x92;
sbit P1_3 = 0x93;
sbit P1_4 = 0x94;
sbit P1_5 = 0x95;
sbit P1_6 = 0x96;
sbit P1_7 = 0x97; /
*------------------------------------------------
SCON Bit Registers
------------------------------------------------*/
sbit RI = 0x98;
sbit TI = 0x99;
sbit RB8 = 0x9A;
sbit TB8 = 0x9B;
sbit REN = 0x9C;
sbit SM2 = 0x9D;
sbit SM1 = 0x9E;
sbit SM0 = 0x9F;
/*------------------------------------------------
P2 Bit Registers
------------------------------------------------*/
sbit P2_0 = 0xA0;
sbit P2_1 = 0xA1;
sbit P2_2 = 0xA2;
sbit P2_3 = 0xA3;
sbit P2_4 = 0xA4;
sbit P2_5 = 0xA5;
sbit P2_6 = 0xA6;
sbit P2_7 = 0xA7;
/*------------------------------------------------
IE Bit Registers
------------------------------------------------*/
sbit EX0 = 0xA8; /* 1=Enable External interrupt 0 */
sbit ET0 = 0xA9; /* 1=Enable Timer 0 interrupt */
sbit EX1 = 0xAA; /* 1=Enable External interrupt 1 */
sbit ET1 = 0xAB; /* 1=Enable Timer 1 interrupt */
sbit ES = 0xAC; /* 1=Enable Serial port interrupt */
sbit ET2 = 0xAD; /* 1=Enable Timer 2 interrupt */ sbit EA = 0xAF; /* 0=Disable all interrupts */
/*------------------------------------------------
P3 Bit Registers (Mnemonics & Ports)
------------------------------------------------*/
sbit P3_0 = 0xB0;
sbit P3_1 = 0xB1;
sbit P3_2 = 0xB2;
sbit P3_3 = 0xB3;
sbit P3_4 = 0xB4;
sbit P3_5 = 0xB5;
sbit P3_6 = 0xB6;
sbit P3_7 = 0xB7; sbit RXD = 0xB0; /* Serial data input */
sbit TXD = 0xB1; /* Serial data output */
sbit INT0 = 0xB2; /* External interrupt 0 */
sbit INT1 = 0xB3; /* External interrupt 1 */
sbit T0 = 0xB4; /* Timer 0 external input */
sbit T1 = 0xB5; /* Timer 1 external input */
sbit WR = 0xB6; /* External data memory write strobe */
sbit RD = 0xB7; /* External data memory read strobe */
/*------------------------------------------------
IP Bit Registers
------------------------------------------------*/
sbit PX0 = 0xB8;
sbit PT0 = 0xB9;
sbit PX1 = 0xBA;
sbit PT1 = 0xBB;
sbit PS = 0xBC;
sbit PT2 = 0xBD;
/*------------------------------------------------
PSW Bit Registers
------------------------------------------------*/
sbit P = 0xD0;
sbit FL = 0xD1;
sbit OV = 0xD2;
sbit RS0 = 0xD3;
sbit RS1 = 0xD4;
sbit F0 = 0xD5;
sbit AC = 0xD6;
sbit CY = 0xD7;
/*------------------------------------------------
Interrupt Vectors:
Interrupt Address = (Number * 8) + 3
------------------------------------------------*/
#define IE0_VECTOR 0 /* 0x03 External Interrupt 0 */
#define TF0_VECTOR 1 /* 0x0B Timer 0 */
#define IE1_VECTOR 2 /* 0x13 External Interrupt 1 */
#define TF1_VECTOR 3 /* 0x1B Timer 1 */
#define SIO_VECTOR 4 /* 0x23 Serial port */ #endif
头文件(二)
/*--------------------------------------------------------------------------
INTRINS.H Intrinsic functions for C51.
Copyright (c) 1988-2002 Keil Elektronik GmbH and Keil Software, Inc.
All rights reserved.
--------------------------------------------------------------------------*/
#ifndef __INTRINS_H__
#define __INTRINS_H__ extern void _nop_ (void);
extern bit _testbit_ (bit);
extern unsigned char _cror_ (unsigned char, unsigned char);
extern unsigned int _iror_ (unsigned int, unsigned char);
extern unsigned long _lror_ (unsigned long, unsigned char);
extern unsigned char _crol_ (unsigned char, unsigned char);
extern unsigned int _irol_ (unsigned int, unsigned char);
extern unsigned long _lrol_ (unsigned long, unsigned char);
extern unsigned char _chkfloat_(float); #endif 参考技术A 我也是新手。。。
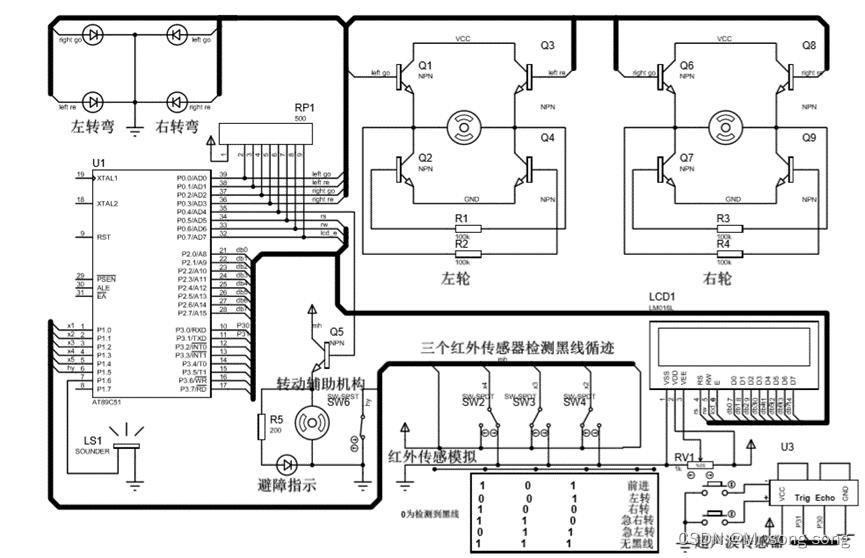
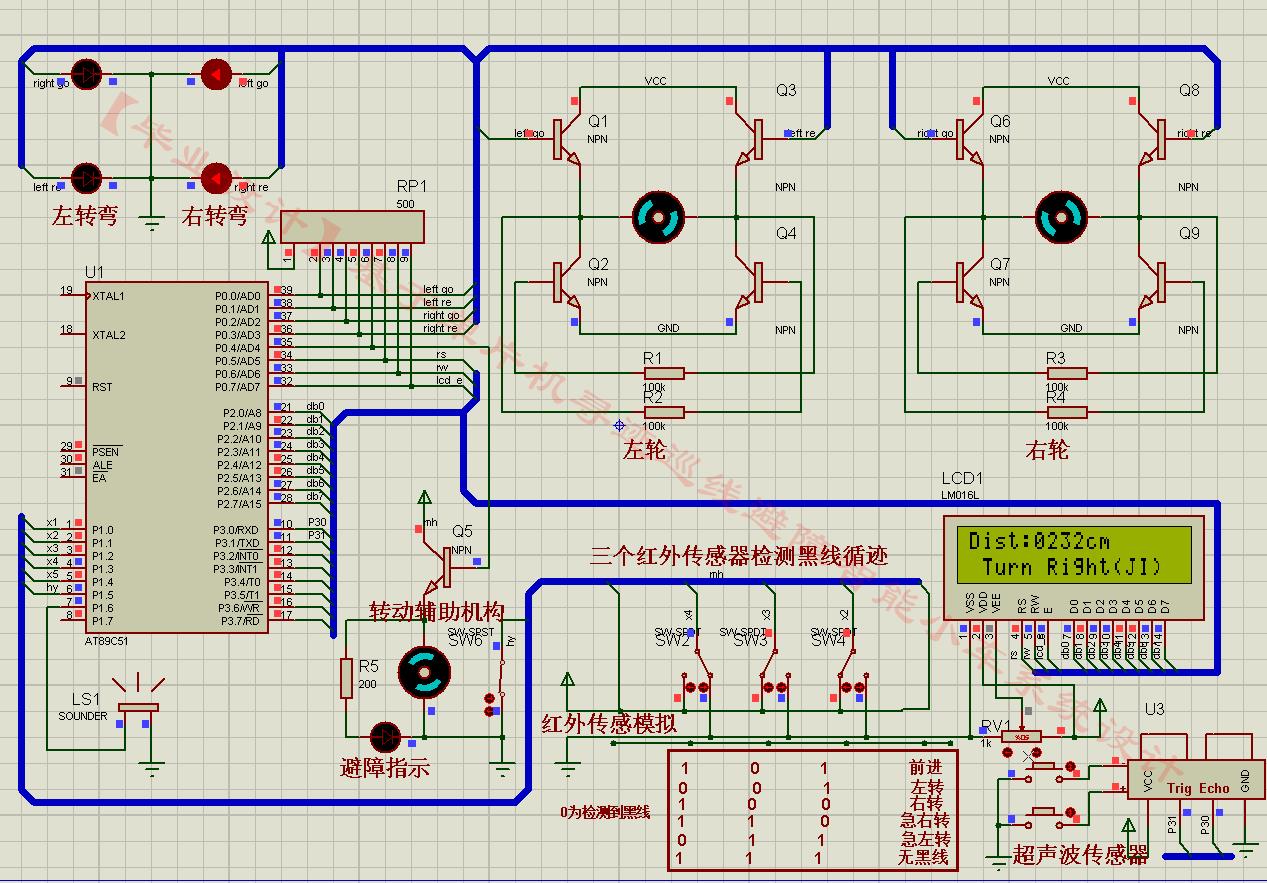
转发-基于单片机寻迹巡线避障智能小车系统设计资料 protues电路仿真
模拟红外传感器进行检测循迹,具体模式如图所示,使用超声波进行避障,避障距离可以进行调整,预设为200cm,可以代码进行修改。适合二次开发。非常好的毕业设计资料参考,包括仿真图+程序+pdf原理图+元器件清单+简要说明+程序详细注释。
/*=====================车轮与避障控制====================*/
void left0() /* 左转 */
left_go = 0; /* 左轮停止 */
left_re = 0;
reght_go = 1; /* 右轮前进 */
reght_re = 0;
soud( 1, 10 );
xml( 0xc0 );
/* xsj(" zuo zhuang ",16); */
xsj( " Turn Left ", 16 );
void left1() /* 左急转 */
left_go = 0; /* 左轮后退 */
left_re = 1;
reght_go = 1; /* 右轮前进 */
reght_re = 0;
soud( 2, 10 );
xml( 0xc0 );
xsj( " Turn Left(JI) ", 16 );
#include <reg51.h>
#include <intrins.h>
/* #include "ultrasonic_wave.h"//超声波头函数 */
#define unchar unsigned char
#define uint unsigned int
#define ULint unsigned long int
sbit left_go = P0 ^ 0; /* 左轮前进,1有效 */
sbit left_re = P0 ^ 1; /* 左轮后退 */
sbit reght_go = P0 ^ 2; /* 右轮前进 */
sbit reght_re = P0 ^ 3; /* 右轮后退 */
sbit mh = P0 ^ 4; /* 避障 */
sbit rs = P0 ^ 5; /* lcd RE端 */
sbit rw = P0 ^ 6; /* lcd R/W端 */
sbit e = P0 ^ 7; /* lcd E端 */
sbit sou = P1 ^ 6; /* 蜂鸣输出 */
unchar seconds = 60, s = 0; minutes = 59;
char code number[] = "0123456789" ;
char flag = 0;
/* 超声波 */
char flags = 0;
/* 超声波距离 */
char flag1s = 0;
/* 计算定时间 */
uint time = 0;
/* 计算距离 */
ULint L_ = 0;
/* 数值有误 */
unchar FW = 0;
unchar p1zt = 0xff, moshi = 0x00; /* p1zt存p1口寻迹状态,moshi存控制模式 */
/* =====================延时函数==================*/
void delay() /* 延时100us */
unchar i;
for ( i = 0; i < 100; i++ )
;
void delay_50ms() /* 延时50ms */
unchar ms;
for ( ms = 0; ms < 50; ms++ )
delay();
void seg( unchar i ) /* 可选秒延时i=1表示1s */
unchar a;
for (; i > 0; i-- )
for ( a = 0; a < 20; a++ )
delay_50ms();
/* ===============lcd屏控制=============== */
void xsj( unchar dat[16], w ) /* 写数据函数,dat[16]要显的字符串,w字符个数,w<16 */
文章转自电设屋,资料百度网盘下载地址 https://www.aiesst.cn/share.html
以上是关于求51单片机超声波避障程序的主要内容,如果未能解决你的问题,请参考以下文章
51单片机 HC-SR04超声波测距 我写的C语言代码,请问