谈谈四元数
Posted 艾攀
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了谈谈四元数相关的知识,希望对你有一定的参考价值。
作为从未学过惯性导航的小白,四元数折磨了我很长时间,至今也是似懂非懂的。下面说的不正确的,希望大神指点。
四元数说起来很好理解,即表示绕着瞬时轴n旋转θ角度。瞬时轴n=cosαi+cosγj+cosβk。
四元数的表示即Q=cos(θ/2)+sin(θ/2)(cosαi+cosγj+cosβk)=q0+q1i+q2j+q3k。姿态矩阵是如何和四元数对应的呢?θ和n是多少呢?
先摆出一个很重要的性质:坐标系旋转,矢量固定不变。坐标系OXYZ按照四元数Q转动,得到新坐标系OXbYbZb,设矢量V在两坐标系中的坐标分别为Ve,Vb。那么有,Vb=Q-1VeQ。具体见http://www.doc88.com/p-893241688972.html
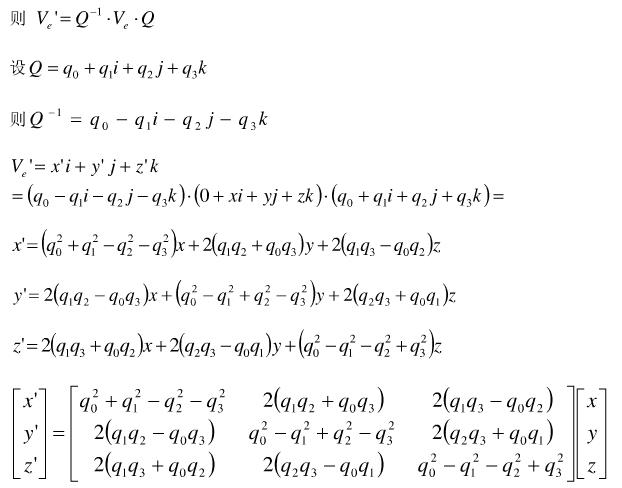
这就是四元数得到旋转矩阵的由来。


这篇文章写的太好了,我就直接复制过来了,感谢作者。
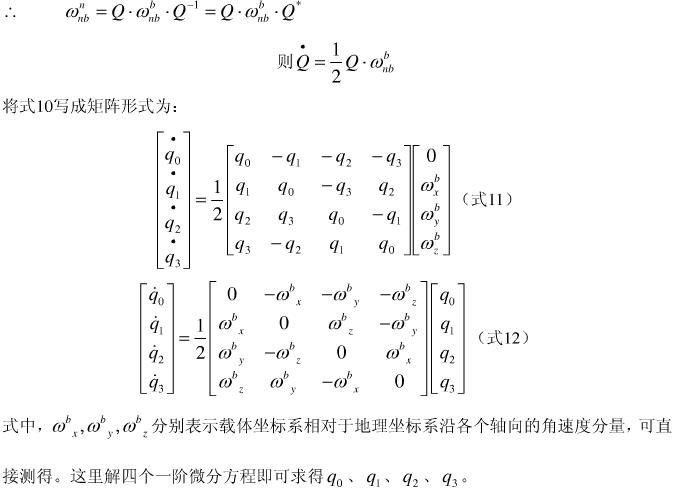
四元数表示旋转矩阵,四元数的微分都说的很清楚了,然而我还是不知道q0,q1,q2,q3跟姿态角到底有什么关系。我想了很久,不知道下面的理解是不是对的。
n的方向就是陀螺仪测得的(wx,wy,wz)矢量和的方向,θ就是(wx,wy,wz)矢量和的长度!!!
wx,wy,wz是飞机绕三个轴旋转的角速度,飞机我们认为是分步骤绕三个轴旋转后到达最终位置的,四元数旋转我们认为是一步旋转到最终位置的。那么这两种旋转肯定有关系啊!四元数是绕一个向量旋转,n表示的是旋转方向,θ表示的是旋转量。wx,wy,wz的旋转其实也是绕三个向量旋转,即(wx,0,0)(0,wy,0)(0,0,wz)。它们最终都到达了同一个位置,那么n当然是(wx,0,0)(0,wy,0)(0,0,wz)三个向量的矢量和啦!
在这里我们一定要认清,向量是与坐标系没有关系的!向量就是向量,是固定的!它只是在不同的坐标系表示的坐标不同罢了!
我们被很多书上的图误导了

就像这样的图,先入为主的认为n是在地理坐标系的,然后去想飞机是怎么旋转的,怎么想也想不明白!当我们谈到向量,我们一定要认为他是独立的存在空间的,跟坐标系什么关系都没有!
四元数的本质就是,飞机可以看成绕三个向量x,y,z三步旋转到最终位置,也可以看成绕一个向量n一步旋转到最终位置。那么当然n=x+y+z啦,这里是矢量和。
我们始终要牢记:向量是独立的!跟坐标系没有任何关系!
n、θ和欧拉角的关系,我一直讲的是角速度,其实应该是角度的增量。θ应该是三个角度增量的长度。下面是PX4的代码。
// Convert the rotation vector to its equivalent quaternion
rotationMag = correctedDelAng.length();
if (rotationMag < 1e-12f)
{
deltaQuat[0] = 1.0;
deltaQuat[1] = 0.0;
deltaQuat[2] = 0.0;
deltaQuat[3] = 0.0;
}
else
{
// We are using double here as we are unsure how small
// the angle differences are and if we get into numeric
// issues with float. The runtime impact is not measurable
// for these quantities.
deltaQuat[0] = cos(0.5*(double)rotationMag);
float rotScaler = (sin(0.5*(double)rotationMag))/(double)rotationMag;
deltaQuat[1] = correctedDelAng.x*rotScaler;
deltaQuat[2] = correctedDelAng.y*rotScaler;
deltaQuat[3] = correctedDelAng.z*rotScaler;
}
// Update the quaternions by rotating from the previous attitude through
// the delta angle rotation quaternion
qUpdated[0] = states[0]*deltaQuat[0] - states[1]*deltaQuat[1] - states[2]*deltaQuat[2] - states[3]*deltaQuat[3];
qUpdated[1] = states[0]*deltaQuat[1] + states[1]*deltaQuat[0] + states[2]*deltaQuat[3] - states[3]*deltaQuat[2];
qUpdated[2] = states[0]*deltaQuat[2] + states[2]*deltaQuat[0] + states[3]*deltaQuat[1] - states[1]*deltaQuat[3];
qUpdated[3] = states[0]*deltaQuat[3] + states[3]*deltaQuat[0] + states[1]*deltaQuat[2] - states[2]*deltaQuat[1];
// Normalise the quaternions and update the quaternion states
quatMag = sqrtf(sq(qUpdated[0]) + sq(qUpdated[1]) + sq(qUpdated[2]) + sq(qUpdated[3]));
if (quatMag > 1e-16f)
{
float quatMagInv = 1.0f/quatMag;
states[0] = quatMagInv*qUpdated[0];
states[1] = quatMagInv*qUpdated[1];
states[2] = quatMagInv*qUpdated[2];
states[3] = quatMagInv*qUpdated[3];
}
correctedDelAng是实时测量的角速度乘以采样周期T。
这里Q的更新采用的是Q=QXΔQ。依据如下:
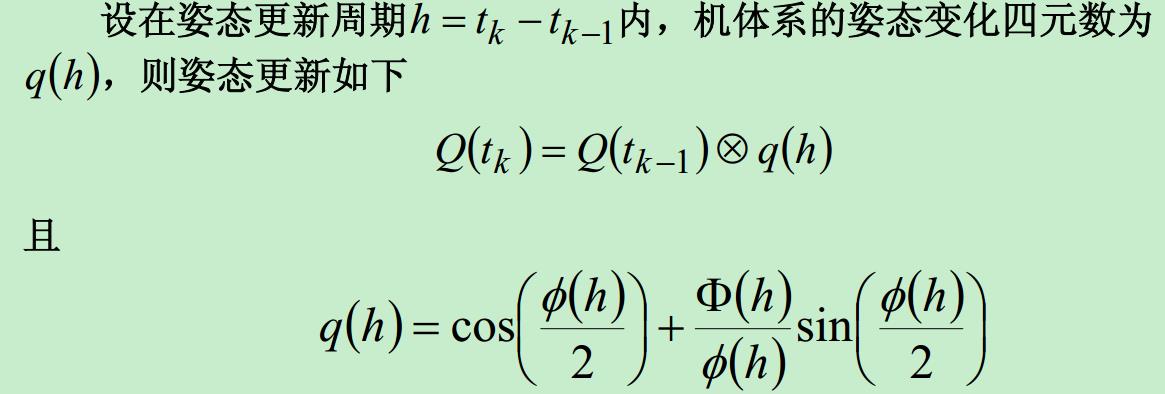
即两个四元数相乘,表示两次旋转。初始的旋转加上此次的旋转增量,即为此刻的旋转矩阵了。
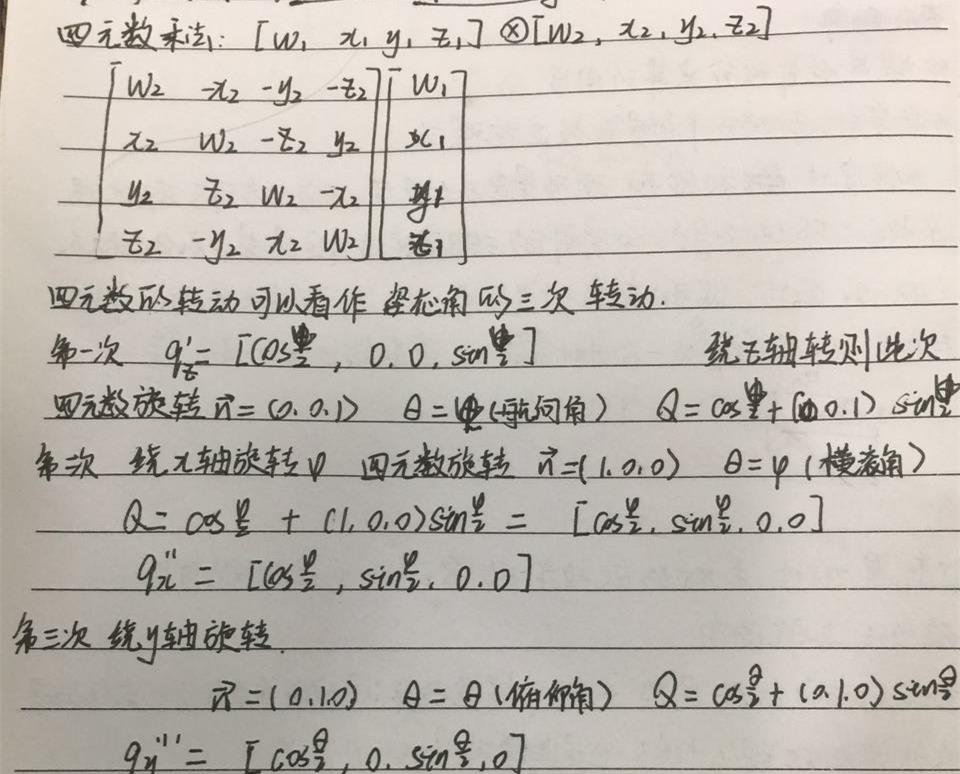
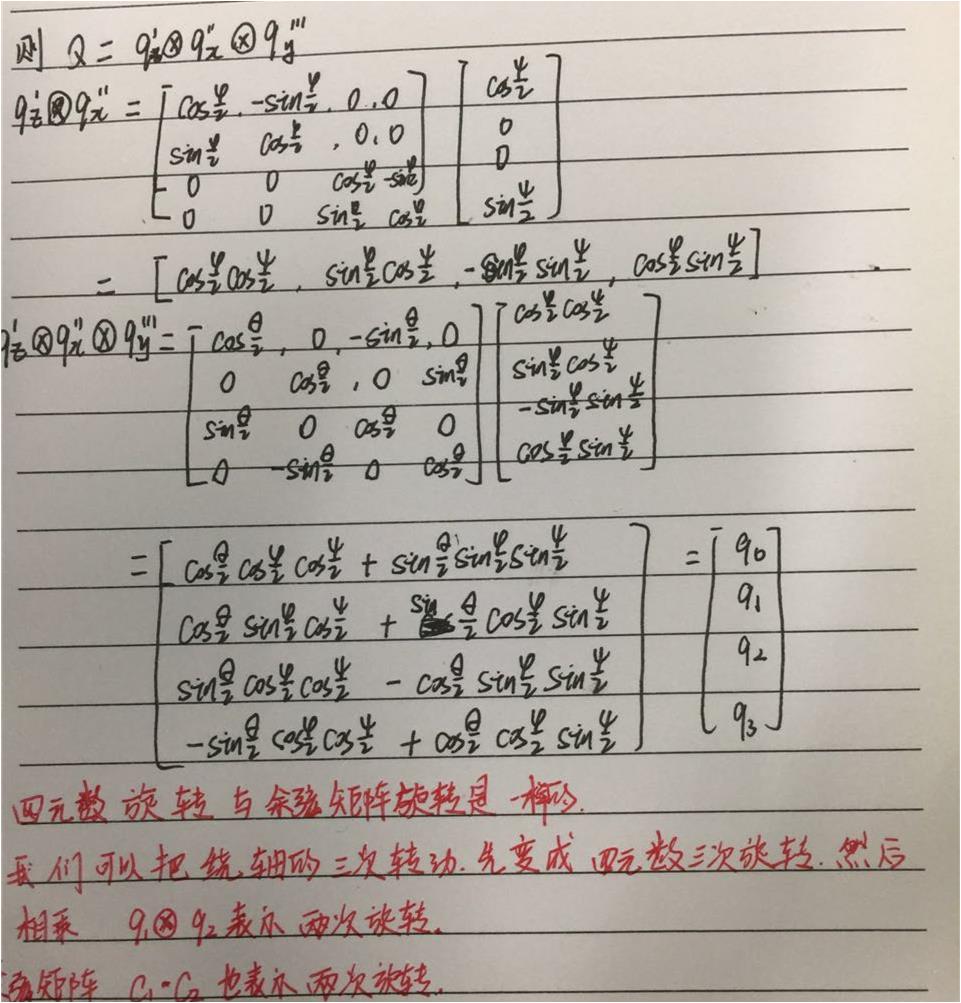
5.今天又看到另外一种求四元数与姿态角的关系的。感觉这种方法更直观。
把姿态角的三次旋转就看成三次四元数旋转,然后q1q2q3就是四元数最终旋转矩阵了。
cosRoll = cosf(initialRoll * 0.5f);
sinRoll = sinf(initialRoll * 0.5f);
cosPitch = cosf(initialPitch * 0.5f);
sinPitch = sinf(initialPitch * 0.5f);
cosHeading = cosf(initialHdg * 0.5f);
sinHeading = sinf(initialHdg * 0.5f);
initQuat[0] = cosRoll * cosPitch * cosHeading + sinRoll * sinPitch * sinHeading;
initQuat[1] = sinRoll * cosPitch * cosHeading - cosRoll * sinPitch * sinHeading;
initQuat[2] = cosRoll * sinPitch * cosHeading + sinRoll * cosPitch * sinHeading;
initQuat[3] = cosRoll * cosPitch * sinHeading - sinRoll * sinPitch * cosHeading;
这是PX4给Q赋初值的代码,就是采用的5这种方法。按理来说这才是最合理的。一开始就把三次旋转就用四元数表示了。至于上面的那种办法,合并旋转轴,也是对的。
以上是关于谈谈四元数的主要内容,如果未能解决你的问题,请参考以下文章