Simulating a Freight in Gazebo
Posted 卡斯柏的博客
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Simulating a Freight in Gazebo相关的知识,希望对你有一定的参考价值。
Installation
Before installing the simulation environment, make sure your desktop is setup with a standard installation of ROS Indigo on Ubuntu 14.04. Once your APT repositories are configured, you can install the simulator:
$ sudo apt-get update $ sudo apt-get install ros-indigo-fetch-gazebo-demo
Warning
Never run the simulator on the robot. Simulation requires that the ROS parameter use_sim_time be set to true, which will cause the robot drivers to stop working correctly. In addition, be sure to never start the simulator in a terminal that has the ROS_MASTER_URI set to your robot for the same reasons.
Starting the Simulator
The fetch_gazebo and fetch_gazebo_demo packages provide the Gazebo environment for Fetch. fetch_gazebo includes several launch files:
- simulation.launch spawns a robot in an empty world.
- playground.launch spawns a robot inside a lab-like test environment. This environment has some tables with items that may be picked up and manipulated. It also has a pre-made map which can be used to test out robot navigation and some simple demonstrations of object grasping.
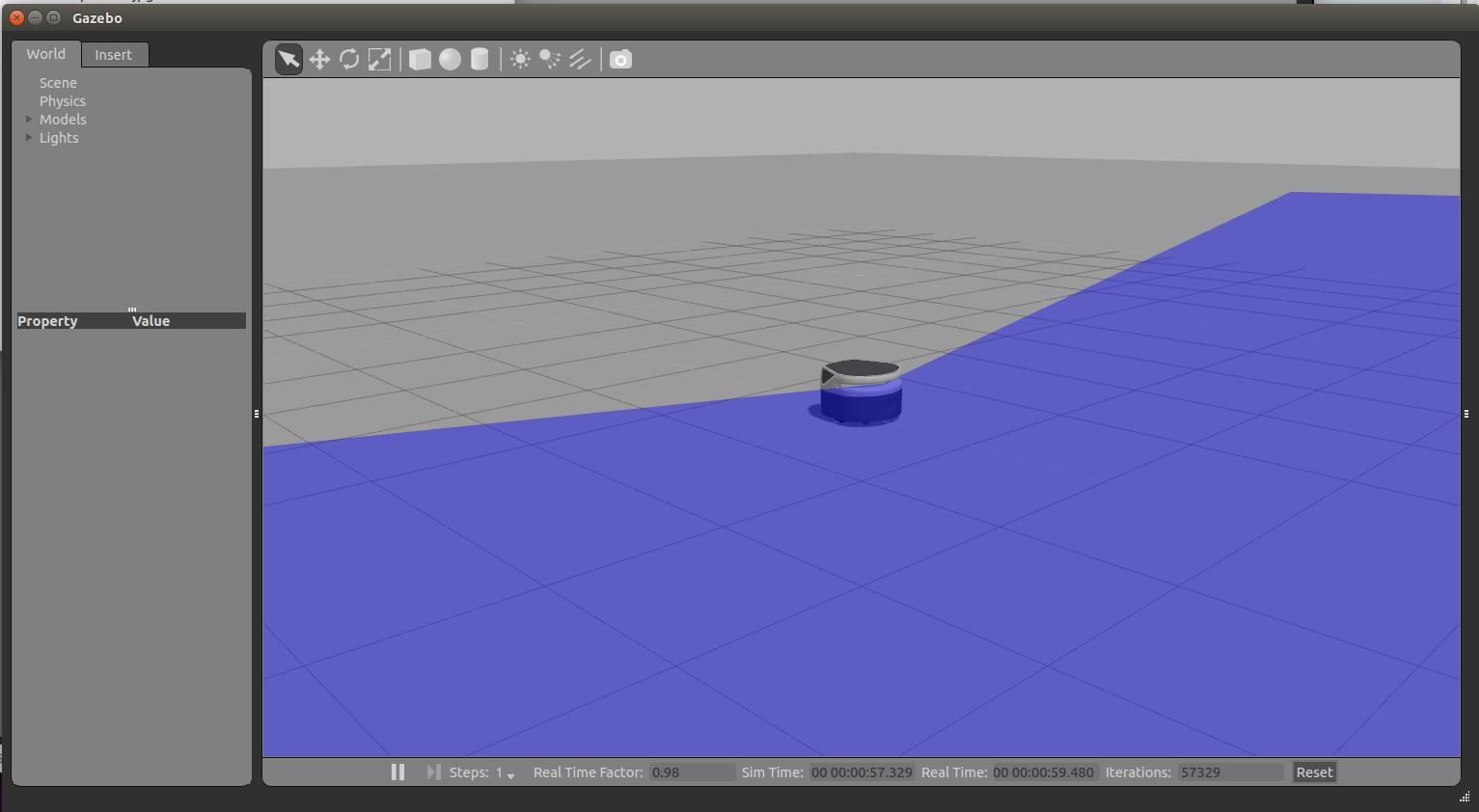
To start the simplest environment with Freight
$ roslaunch fetch_gazebo simulation.launch robot:=freight
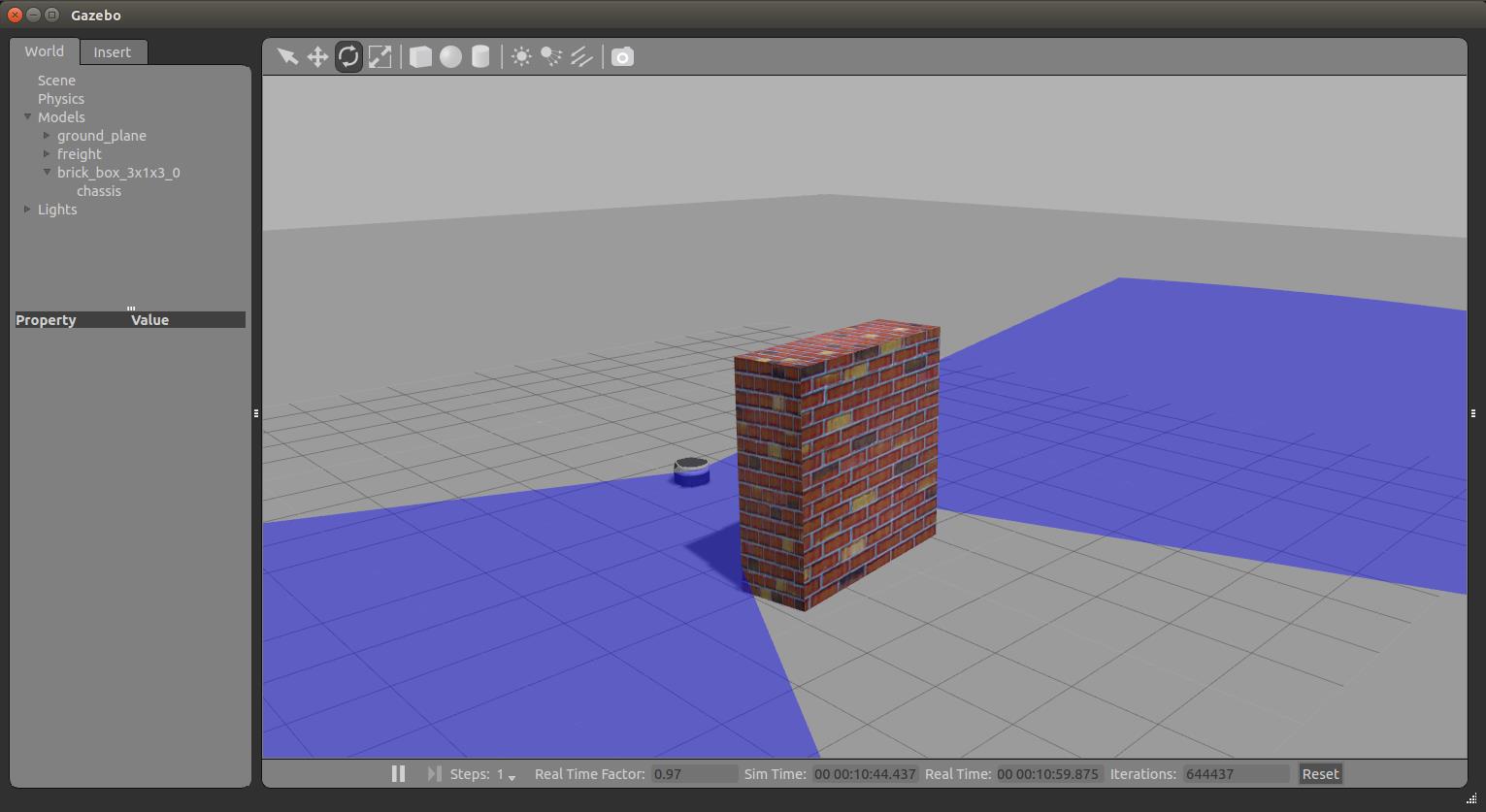
Adding a Brick wall to see how lidar scan works:
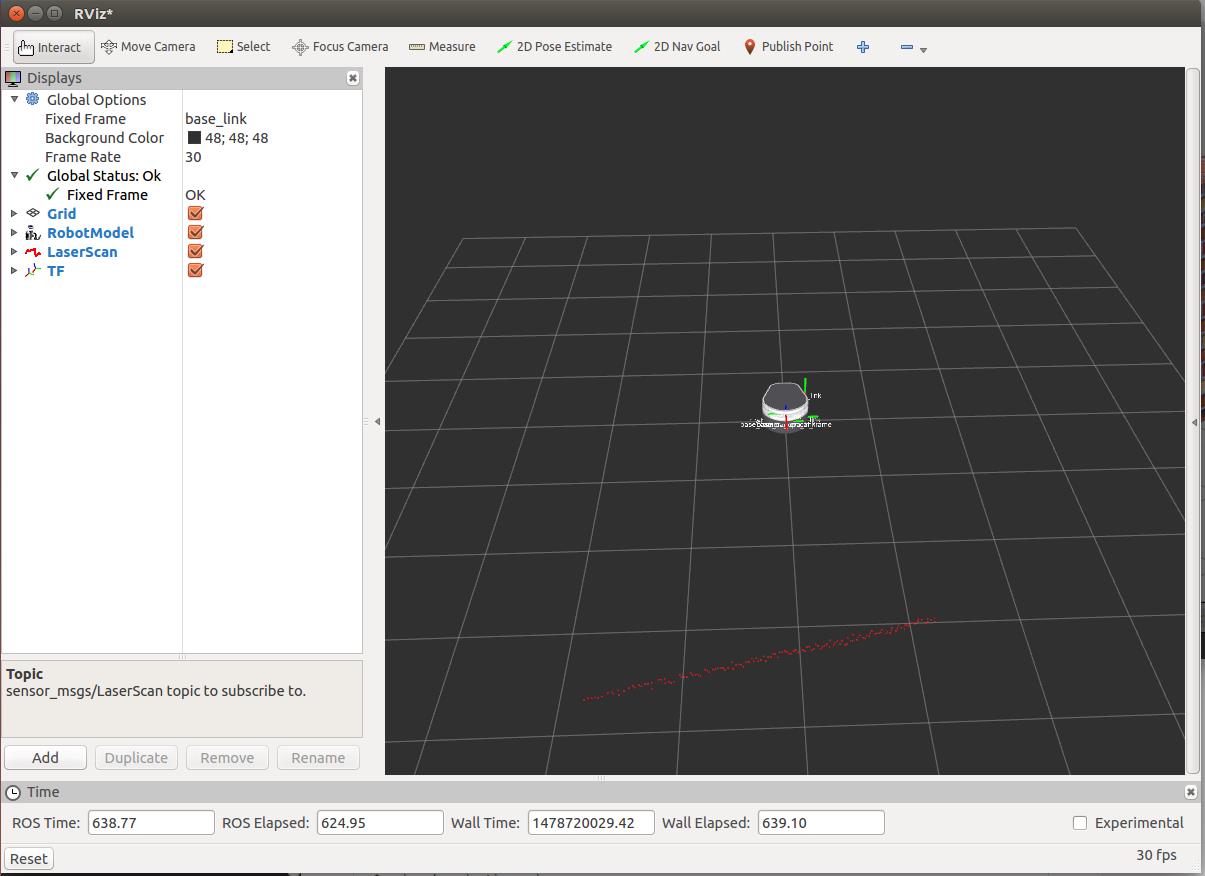
Visualizing with RVIZ
Even though Gazebo has a graphical visualization, RVIZ is still the preferred tool for interacting with your robot.
$ rosrun rviz rviz
以上是关于Simulating a Freight in Gazebo的主要内容,如果未能解决你的问题,请参考以下文章
P3580 [POI2014]ZAL-Freight(单调队列dp)
Amber TUTORIAL B5: Simulating the Green Fluorescent Protein
论文导读Selecting Data Augmentation for Simulating Interventions