Cartographer ROS for Turtlebots 初探
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Cartographer ROS for Turtlebots 初探相关的知识,希望对你有一定的参考价值。
今天抽了会时间安装了Cartographer ROS for Turtlebots
系统版本: Ubuntu 14.04 (Trusty) with ROS Indigo,系统是用的TurtleBot ISO with the following link and create startup USB disk using Startup Disk Creator or similar tools.
-
ubuntu-14.04.2-desktop-amd64-turtlebot-RC0.iso, sha512sum 超方便,不用总是去配置turtlebot
1. 安装
安装过程在https://github.com/googlecartographer/cartographer_turtlebot/blob/master/docs/source/index.rst都有详细的描述。
# Install wstool and rosdep.
sudo apt-get update
sudo apt-get install -y python-wstool python-rosdep ninja-build
# Create a new workspace in ‘catkin_ws‘.
mkdir catkin_ws
cd catkin_ws
wstool init src
# Merge the cartographer_turtlebot.rosinstall file and fetch code for dependencies.
wstool merge -t src https://raw.githubusercontent.com/googlecartographer/cartographer_turtlebot/master/cartographer_turtlebot.rosinstall
wstool update -t src
# Install deb dependencies.
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
# Build and install.
catkin_make_isolated --install --use-ninja
source install_isolated/setup.bash
但是问题一般都会处在catkin_make_isolated --install --use-ninja,因为这个时候需要翻一下墙,装个包,FQ的方法我就不多说了我用的是greenvpn,在ubuntu上也很好用,效果很好。
然后就能很顺利的装好。
2 测试
测试包有4GB多,可以通过迅雷下载比较快 https://storage.googleapis.com/cartographer-public-data/bags/turtlebot/cartographer_turtlebot_demo.bag
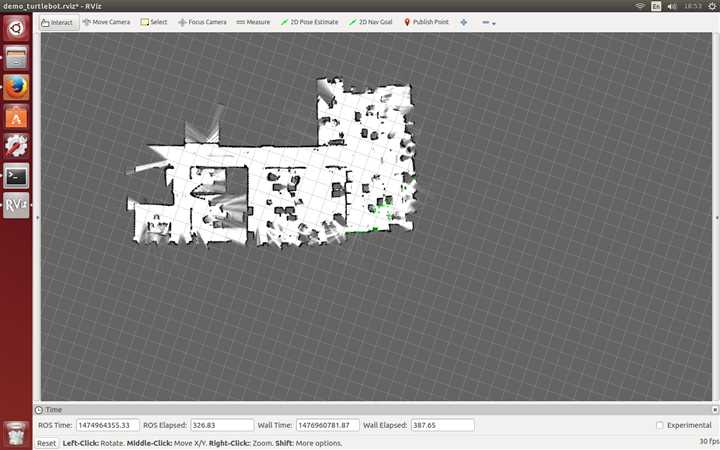
2D LIDAR demo.
roslaunch cartographer_turtlebot demo_lidar_2d.launch bag_filename:=${HOME}/Downloads/cartographer_turtlebot_demo.bag
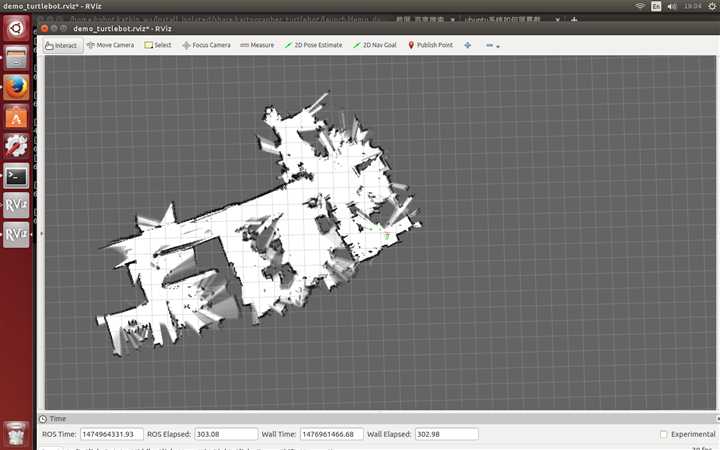
# Launch the 2D depth camera demo.
roslaunch cartographer_turtlebot demo_depth_camera_2d.launch bag_filename:=${HOME}/Downloads/cartographer_turtlebot_demo.bag
# Launch the 3D depth camera demo.
roslaunch cartographer_turtlebot demo_depth_camera_3d.launch bag_filename:=${HOME}/Downloads/cartographer_turtlebot_demo.bag
当然,谷歌的demo跑起来也是很爽的。我做了前两个
接下来,要用Turltebot实际做个实验,还没来得及呢
以上是关于Cartographer ROS for Turtlebots 初探的主要内容,如果未能解决你的问题,请参考以下文章