记一次擦窗机器人项目的拯救
Posted NeuralWiki
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了记一次擦窗机器人项目的拯救相关的知识,希望对你有一定的参考价值。
我也是临危受命,在北京联系导师的时候,学校的老板就催我早点回去。其实,我心知肚明,那就是一个烂摊子,一个有关擦窗机器人的项目。老师们做的更多的是模仿,缺少思考,更缺少工程思维。
起初拿到这个项目,我就断言,这是一个几近于废掉的项目。混乱的代码,幼稚的算法,不经考虑的硬件,甚至没有调好的底层。
我只好给自己定一个需求目标:
做出机器人在窗户上的运动和路径规划。

第一天:
第一天先来重构程序结构,原来的程序是这样的:
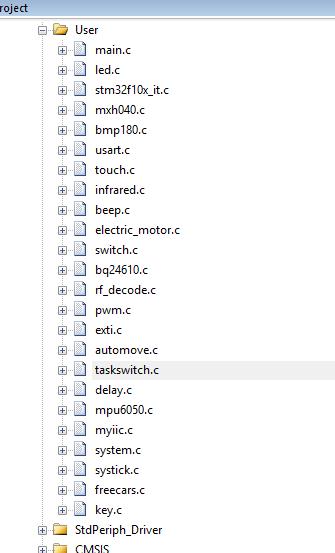
暂且不提代码质量,混乱的结构,完全没有主次:
那么先把传感器的拿出来,再拿出控制层,哦,没有控制层,只好重建,这个工程完全没有闭环控制,那么,怎么可能走得直线吗!怎么可能按照一定的角度走,怎么可能路径规划!
再就是线程管理层,暂时先用比较简单地结构来重新写。结果发现,原来的人写了一堆的中断,根本没有系统意识,一个随便运行着的程序,正在等待着各种卡死。最后,通信层,也就是上位机交互调试,如果没有上位机配合,怎么调波形呢。
1.User - 调度管理,这一部分要详细说下。原来的作者几乎就是一个LOOP()解决所有问题,控制和各种资源调度全在这一个周期的循环里面,完全没有时序感,基本就是GG,所以我就做了这样的简单处理。
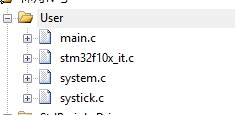
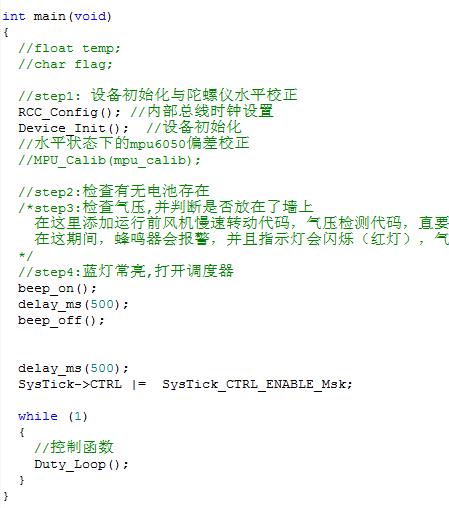
main:
Duty_Loop:
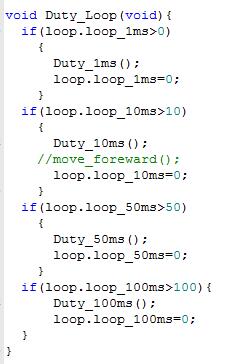
通过systick时钟来确定不同周期的任务
Duty_1ms:传感器处理部分,语音芯片,姿态器件,按键啦,气压计等等;
Duty_10ms:控制层,控制机器人的两个参数:basefly:油门也就是前进后退的基础速度;angel:机器人的角度;
Duty_50ms:任务调度器;
Duty_100ms:上位机通信;
这样,整个系统就建立起基础架构了!
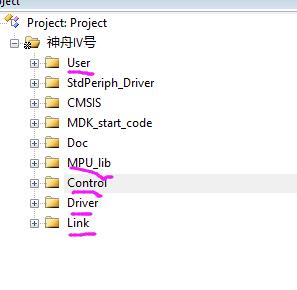
MPU_lib - 姿态解算
(操蛋了,硬件设计第一大失误,就是采用了103c8t6,一款128k的芯片,根本顶不住计算量,而且这个系列,没有浮点数计算优化,所以只好通过配置mpu6050DMP解决问题,不过这也导致了后面的问题)
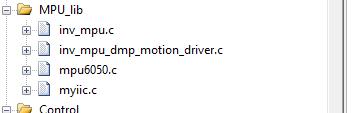
第一天,解决了姿态这一块的问题,原来的作者就是通过简单融合滤波,角度不稳定也不够准。陀螺仪求角度的问题主要是存在零点漂移,加速度计的问题就是有迟滞性。因此需要做融合滤波,不详细讲这里了。但是,这个片子的资源太小,做计算加上卡尔曼根本顶不住,只好用DMP模式,但是DMP模式也存在漏洞,进而导致后面不得不推倒重来。
DMP是啥?DMP就是MPU6050内置的计算单元,使用了官方的姿态计算算法,效果并不如人意。
以前做过DMP配置,配置完毕,读取四元数,通过四元数计算角度:

这里埋下了隐患。好,得到角度了。
直接上玻璃,不好调参数,那么先在地上调。其实效果是一样的。
第二天:
下面,就解决第二大问题,控制问题:
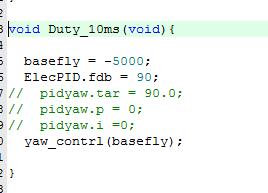
这就是控制层的函数,ElecPID.fdb是控制器的目标角度值。yaw_control就是PID控制函数了。
Control:
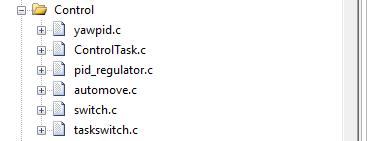
这一部分就很有难度了。我个人认为,我的PID函数是最简直漂亮的。采用了C语言 的指针函数这一技巧,非常的适合PID控制。还可以灵活切换不同的控制函数。PID控制使用了普通的线性pid控制器,控制机器人向某个方向按照一定的速度运转,如果角度可以做到0~360°的话,就属于全导航,但是鉴于我们姿态器件的算法能力,我们实现了0~180°方向的导航,其实这已经满足需求了。
![]()
PID控制见上图,PID_Reset的作用是设置参数,PID_Calc则是控制输出函数:
驱动电路如下:
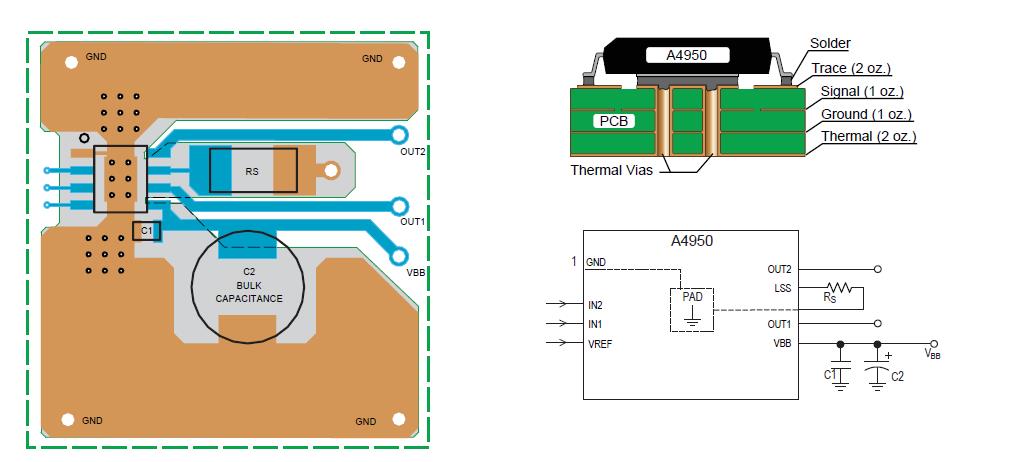
基于PWM控制实现正转和反转的功率输出,IN2\\IN1接两个PWM引脚。这里就是布线要求严格一点,PAD上要多铺过孔,大电流通过的同时,减少分布参数,较小电磁干扰,然后电容C1比较关键,必须使用快恢复二极管,包括做开关电源也是这里处理不好,输出就不好看。布线也是一个经验问题。
之后,通过无线蓝牙调试具体的参数,基本做到:转向反应快,超调小,控制平滑,就可以。
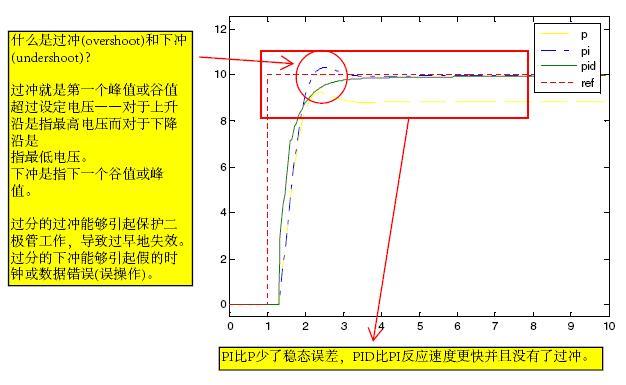
做到这种曲线,波动和偏差尽可能小。但是,系统的调节能力比较弱,慢速系统的症结。
第三天:
我们弱化一下PID部分吧。直接将上层的任务调度层。因为实现时间太短。无法做复杂的任务调度管理。
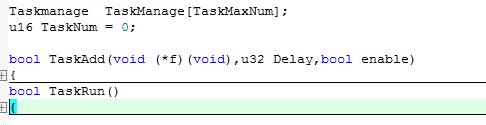
我实现了上面两个函数,就是一个单线程调度器,将任务函数f插入*Task中,然后TaskRun作为定期检查函数,定期检查函数运行:
实现三个功能:
1.是否触发函数(基于时间还是基于事件);
2.函数是否使能;
3.是否注销函数;
然后运行函数队列;
所以这里需要有一个非常严格的时钟函数,为*Task做标定。
以上是关于记一次擦窗机器人项目的拯救的主要内容,如果未能解决你的问题,请参考以下文章
记一次 .NET 某机械臂智能机器人控制系统MRS CPU爆高分析