[SLAM] 02 Some algorithms of 3D reconstruction
Posted 机器学习水很深
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[SLAM] 02 Some algorithms of 3D reconstruction相关的知识,希望对你有一定的参考价值。
链接:http://www.zhihu.com/question/29885222/answer/100043031
首先一切建立在相机模型 x = kPX 上
x,X分别代表图片和空间中的二维三维齐次坐标,
k为相机内参矩阵,
P = [R | t] 为空间坐标系到相机坐标系的 orientation- R 和 transformation- t
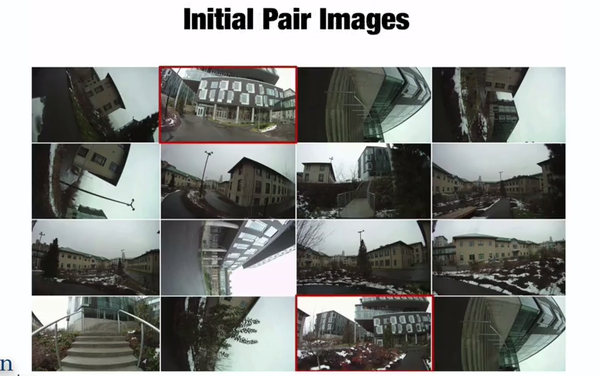
1, 首先对某一场景多角度多位置得到很多初始数据,选择其中的某两个来初始化,选定其中一个为空间原点。
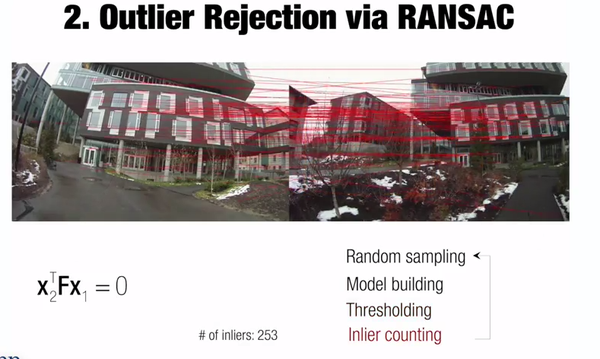
2. 通过SIFT ,SURF等特征点查找匹配之后,用 8点法 和 RANSAC,多次计算两张图之间的Fundamental Matrix,选择其中最好的一个。
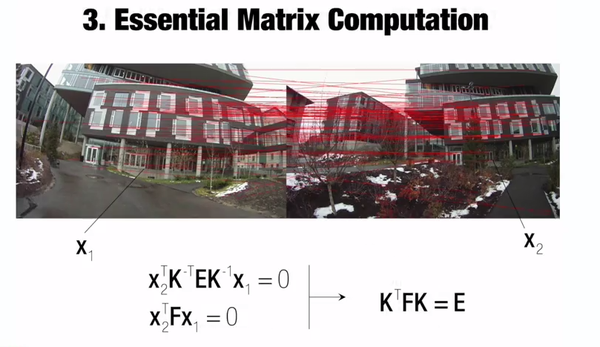
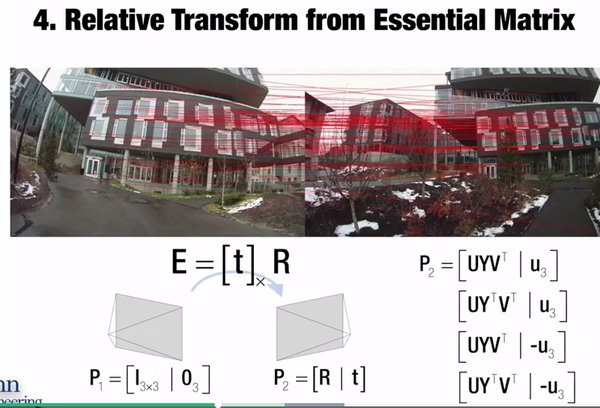
3. 用F-matrix 计算 Essential-matrix
4, 用 E-matrix 计算相机的 R 和 T,需要用SVD分解,因为orientation R是一个正交阵。
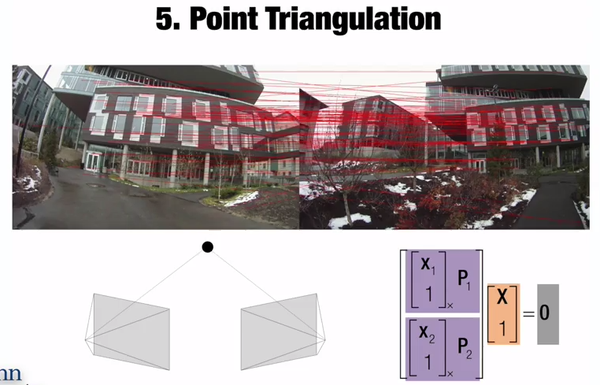
5, 得到两个相机之间的P矩阵之后,通过对应点,用 Triangulation 计算对应点的空间坐标。
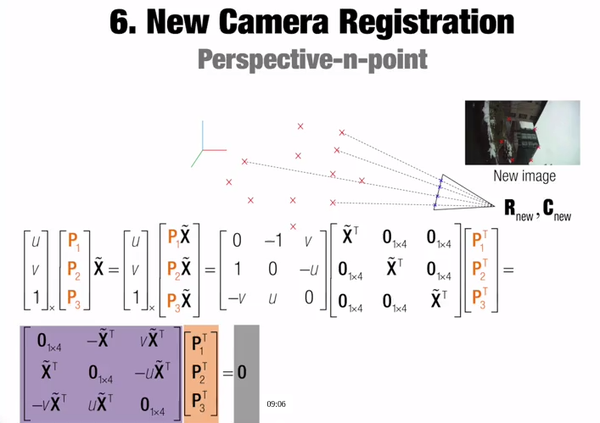
6. 第三个位置的照片,直接根据已有的上步计算的点,与第三个位置图片上点的对应关系,计算P矩阵。
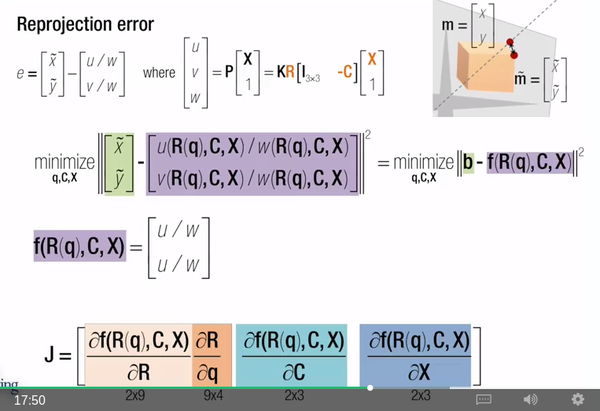
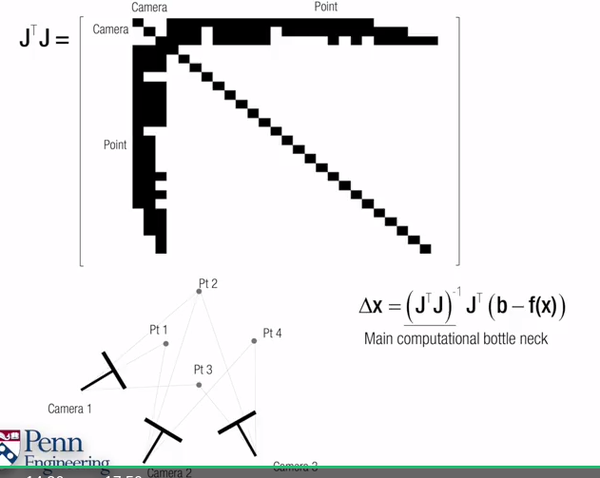
7. 最后全局优化,Bundle Adjustment
8, Bundle Adjustment所有的艺术就是优化 hessian matrix的逆矩阵。
------------------------------------------------------------------------------------------------------------
推荐宾大Shi Jianbo教授在Coursera上的公开课 Robotics:Perception
上面所有的截图都来自他最后一次课的视频讲义截图
https://www.coursera.org/learn/robotics-perception/home/welcome
配合视觉圣经 Multiple View Geometry来看简直完美。Ransac, Bundle-adjustment, 2-View, Homography全部都有。一共四周,有线性代数基础(主要是SVD用来解线性方程),作业用Matlab.
第一周作业: Dolly Zoom
第二周作业: 平面摄影几何,广告牌在视频中的投影,类似2D增强现实
第三周作业: 在平面Barcode上通过sift检测特征点,通过H矩阵计算相机位置,做3D增强现实
第四周作业: 3D重建
以上是关于[SLAM] 02 Some algorithms of 3D reconstruction的主要内容,如果未能解决你的问题,请参考以下文章
Algorithm delete some charactors from string
Some features we need to keep in mind about the implementation of QuickSort algorithm
安装 TM 包时依赖项“slam”不可用
Camera Calibration's fx and fy do Cares in SLAM
服装数据集数据表
Ubuntu20.04下运行VINS-MonoGVINS