齐次变换
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了齐次变换相关的知识,希望对你有一定的参考价值。
除了使用三维直角座标来表示物体的空间位置之外,在图学中,也常使用「齐次座标」(homogeneous coordinate)来呈现,这一方面是为了方便将空间的平移、缩放、旋转等转换使用矩阵来记录。
齐次座标使用四个元素来表示,即(x, y, z, w),要将齐次座标转换为三维座标,其关系为(x/w, y/w, z/w),其中w表示座标轴的远近参数,通常设为1,如果要用来表示远近感,则会设定为距离的倒数(1/距离),例如表示一个无限远的距离时,我们会将w 设定为0。
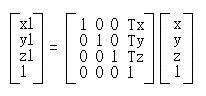
可以直接将之前介绍过的公式使用齐次座标与矩阵来展现,就可以了解齐次座标的好处,例如以三维座标常见的平移、缩放与旋转为例,表示方法如下(原座标x,y ,z,转换后x1,y1,z1):
平移:假设三个平移量分别为Tx、Ty与Tz。 。 。 。
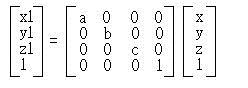
縮放:假設x、y、z的縮放比例分別為a、b、c。。 。。
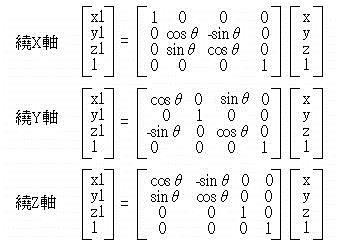
旋轉:關於旋轉的公式導證,之前介紹過了。。。。
以上是关于齐次变换的主要内容,如果未能解决你的问题,请参考以下文章
如何在 python 中计算图像的 4 X 4 齐次变换矩阵