深入理解 GCD
Posted 小敏的博客
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了深入理解 GCD相关的知识,希望对你有一定的参考价值。
前言
首先提出一些问题:
-
dispatch_async 函数如何实现,分发到主队列和全局队列有什么区别,一定会新建线程执行任务么?
-
dispatch_sync 函数如何实现,为什么说 GCD 死锁是队列导致的而不是线程,死锁不是操作系统的概念么?
-
信号量是如何实现的,有哪些使用场景?
-
dispatch_group 的等待与通知、dispatch_once 如何实现?
-
dispatch_source 用来做定时器如何实现,有什么优点和用途?
-
dispatch_suspend 和 dispatch_resume 如何实现,队列的的暂停和计时器的暂停有区别么?
以上问题基本都是对 GCD 常用 API 的追问与思考,深入理解这些问题有助于更好地使用 GCD,比如以下代码的执行结果是什么?
- (void)viewDidLoad {
[super viewDidLoad];
dispatch_queue_t queue = dispatch_queue_create("com.bestswifter.queue", nil);
dispatch_sync(queue, ^{
NSLog(@"current thread = %@", [NSThread currentThread]);
dispatch_sync(dispatch_get_main_queue(), ^{
NSLog(@"current thread = %@", [NSThread currentThread]);
});
});
}
以下内容为个人的学习总结,仅供参考,不一定适合新手入门。最好的学习方法还是自己下载一份源码并仔细阅读学习。
文章主要分析了常见 API 的实现原理,因水平所限,不可避免的有理解错误的地方,欢迎指出。如果对具体分析不感兴趣,可以直接跳到文章末尾的“总结”部分。
知识储备
阅读 GCD 源码之前,需要了解一些相关知识,这样才能在读到源码时不至于一脸懵逼,进而影响理解。
DISPATCH_DECL
GCD 中对变量的定义大多遵循如下格式:
#define DISPATCH_DECL(name) typedef struct name##_s *name##_t
比如说非常常见的 DISPATCH_DECL(dispatch_queue);,它的展开形式是:
typedef struct dispatch_queue_s *dispatch_queue_t;
这行代码定义了一个 dispatch_queue_t 类型的指针,指向一个 dispatch_queue_s 类型的结构体。
TSD
TSD(Thread-Specific Data) 表示线程私有数据。在 C++ 中,全局变量可以被所有线程访问,局部变量只有函数内部可以访问。而 TSD 的作用就是能够在同一个线程的不同函数中被访问。在不同线程中,虽然名字相同,但是获取到的数据随线程不同而不同。
通常,我们可以利用 POSIX 库提供的 API 来实现 TSD:
int pthread_key_create(pthread_key_t *key, void (*destr_function) (void *))
这个函数用来创建一个 key,在线程退出时会将 key 对应的数据传入 destr_function 函数中进行清理。
我们分别使用 get/set 方法来访问/修改 key 对应的数据:
int pthread_setspecific(pthread_key_t key, const void *pointer)
void * pthread_getspecific(pthread_key_t key)
在 GCD 中定义了六个 key,根据名字大概能猜出各自的含义:
pthread_key_t dispatch_queue_key;
pthread_key_t dispatch_sema4_key;
pthread_key_t dispatch_cache_key;
pthread_key_t dispatch_io_key;
pthread_key_t dispatch_apply_key;
pthread_key_t dispatch_bcounter_key;
fastpath && slowpath
这是定义在 internal.h 中的两个宏:
#define fastpath(x) ((typeof(x))__builtin_expect((long)(x), ~0l))
#define slowpath(x) ((typeof(x))__builtin_expect((long)(x), 0l))
为了理解所谓的快路径和慢路径,我们需要先学习一点计算机基础知识。比如这段非常简单的代码:
if (x)
return 1;
else
return 39;
由于计算机并非一次只读取一条指令,而是读取多条指令,所以在读到 if 语句时也会把 return 1 读取进来。如果 x 为 0,那么会重新读取 return 39,重读指令相对来说比较耗时。
如过 x 有非常大的概率是 0,那么 return 1 这条指令每次不可避免的会被读取,并且实际上几乎没有机会执行, 造成了不必要的指令重读。当然,最简单的优化就是:
if (!x)
return 39;
else
return 1;
然而对程序员来说,每次都做这样的判断非常烧脑,而且容易出错。于是 GCC 提供了一个内置函数 __builtin_expect:
long __builtin_expect (long EXP, long C)
它的返回值就是整个函数的返回值,参数 C 代表预计的值,表示程序员知道 EXP 的值很可能就是 C。比如上文中的例子可以这样写:
if (__builtin_expect(x, 0))
return 1;
else
return 39;
虽然写法逻辑不变,但是编译器会把汇编代码优化成 if(!x) 的形式。
因此,在苹果定义的两个宏中,fastpath(x) 依然返回 x,只是告诉编译器 x 的值一般不为 0,从而编译器可以进行优化。同理,slowpath(x) 表示 x 的值很可能为 0,希望编译器进行优化。
dispatch_queue_t
以 dispatch_queue_create 的源码为例:
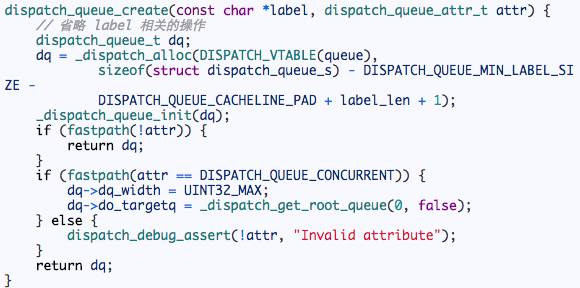
我们知道创建队列时, attr 属性有三个值可选,nil、DISPATCH_QUEUE_SERIAL(实际上就是 nil) 或 DISPATCH_QUEUE_CONCURRENT。第一个 if 判断中,苹果认为串行队列,或者 NULL 参数更常见,因此 !attr 的值很有可能不为 0,这与上文的结论一致。
第二个判断中,参数几乎有只可能是 DISPATCH_QUEUE_CONCURRENT,因此 attr == DISPATCH_QUEUE_CONCURRENT 这个判断机会不会为 0,依然与 fastpath 的作用一致。
_dispatch_get_root_queue 会获取一个全局队列,它有两个参数,分别表示优先级和是否支持 overcommit。一共有四个优先级,LOW、DEFAULT、HIGH 和 BACKGROUND,因此共有 8 个全局队列。带有 overcommit 的队列表示每当有任务提交时,系统都会新开一个线程处理,这样就不会造成某个线程过载(overcommit)。
这 8 个全局队列的序列号是 4-11,序列号为 1 的队列是主队列,2 是 manager 队列,用来管理 GCD 内部的任务(比如下文介绍的定时器),3 这个序列号暂时没有使用。队列 的 dq_width 被设置为 UINT32_MAX,表示这些队列不限制并发数。
作为对比,在 _dispatch_queue_init 中,并发数限制为 1,也就是串行队列的默认设置:
static inline void _dispatch_queue_init(dispatch_queue_t dq) {
dq->do_next = DISPATCH_OBJECT_LISTLESS;
dq->do_targetq = _dispatch_get_root_queue(0, true);
dq->dq_running = 0;
dq->dq_width = 1;
}
注意这行代码: dq->do_targetq = _dispatch_get_root_queue(0, true);,它涉及到 GCD 队列与 block 的一个重要模型,target_queue。向任何队列中提交的 block,都会被放到它的目标队列中执行,而普通串行队列的目标队列就是一个支持 overcommit 的全局队列,全局队列的底层则是一个线程池。
借用 objc 的文章 中的图片来表示:
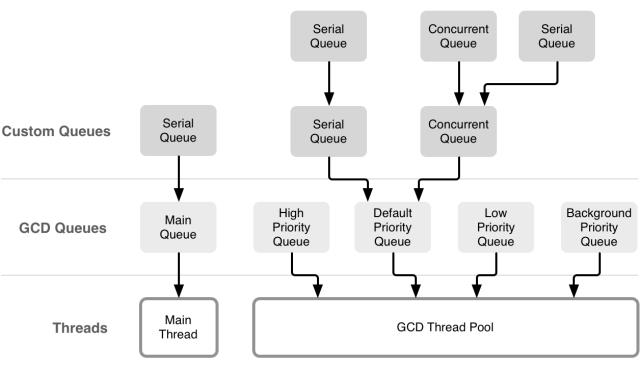
线程池与目标队列
dispatch_async
直接上函数实现:
dispatch_async(dispatch_queue_t queue, dispatch_block_t block) {
dispatch_async_f(dq, _dispatch_Block_copy(work), _dispatch_call_block_and_release);
}
队列其实就是一个用来提交 block 的对象,当 block 提交到队列中后,将按照 “先入先出(FIFO)” 的顺序进行处理。系统在 GCD 的底层会维护一个线程池,用来执行这些 block。
block 参数的类型是 dispatch_block_t,它是一个没有参数,没有返回值的 block:
typedef void (^dispatch_block_t)(void);
dispatch_async 的函数很简单,它将 block 复制了一份,然后调用另一个函数 dispatch_async_f:
dispatch_async_f(dispatch_queue_t queue, void *context, dispatch_function_t work);
work 参数是一个函数,在实际调用时,会把第二参数 context 作为参数传入,以 _dispatch_call_block_and_release 为例:
void _dispatch_call_block_and_release(void *block) {
void (^b)(void) = block;
b();
Block_release(b);
}
省略各种分支后的 dispatch_async_f 函数实现如下:
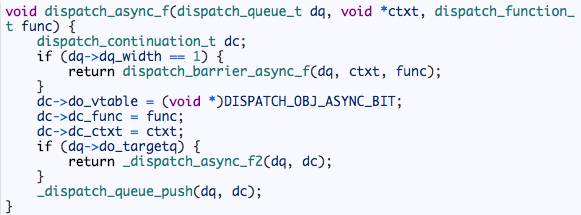
可见如果是串行队列 (dq_width = 1),会调用 dispatch_barrier_async_f 函数处理,这个后文会有介绍。如果有 do_targetq 则进行转发,否则调用 _dispatch_queue_push 入队。
这里的 dispatch_continuation_t 其实是对 block 的封装,然后调用 _dispatch_queue_push 这个宏将封装好的 block 放入队列中。
把这个宏展开,然后依次分析调用栈,选择一条主干调用线,结果如下:
_dispatch_queue_push
└──_dispatch_trace_queue_push
└──_dispatch_queue_push
└──_dispatch_queue_push_slow
└──_dispatch_queue_push_list_slow2
└──_dispatch_wakeup
└──dx_probe
队列中保存了一个链表,我们首先将新的 block 添加到链表尾部,然后调用 dx_probe 宏,它依赖于 vtable 数据结构,GCD 中的大部分对象,比如队列等,都具有这个数据结构。它定义了对象在不同操作下该执行的方法,比如在这里的 probe 操作下,实际上会执行 _dispatch_queue_wakeup_global 方法,调用栈如下
_dispatch_queue_wakeup_global
└──_dispatch_queue_wakeup_global2
└──_dispatch_queue_wakeup_global_slow
在 _dispatch_queue_wakeup_global_slow 我们见到了熟悉的老朋友,pthread 线程:
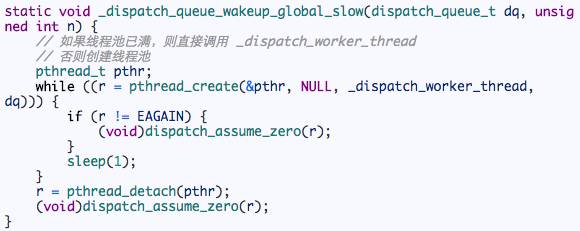
由此可见这里确实使用了线程池。创建线程后会执行 _dispatch_worker_thread 回调:
_dispatch_worker_thread
└──_dispatch_worker_thread4
└──_dispatch_continuation_pop
在 pop 函数中,我们拿到了最早加入的任务,然后执行:
static inline void _dispatch_continuation_pop(dispatch_object_t dou) {
// ...
_dispatch_client_callout(dc->dc_ctxt, dc->dc_func);
if (dg) {
dispatch_group_leave(dg);
_dispatch_release(dg);
}
}
dispatch_async 的实现比较复杂,主要是因为其中的数据结构较多,分支流程控制比较复杂。但思路其实很简单,用链表保存所有提交的 block,然后在底层线程池中,依次取出 block 并执行。
如果熟悉了相关数据结构和调用流程,接下来研究 GCD 的其他 API 就比较轻松了。
dispatch_sync
同步方法的实现相对来说和异步类似,而且更简单,调用栈如下:
dispatch_sync
└──dispatch_sync_f
└──_dispatch_sync_f2
└──_dispatch_sync_f_slow
static void _dispatch_sync_f_slow(dispatch_queue_t dq, void *ctxt, dispatch_function_t func) {
_dispatch_thread_semaphore_t sema = _dispatch_get_thread_semaphore();
struct dispatch_sync_slow_s {
DISPATCH_CONTINUATION_HEADER(sync_slow);
} dss = {
.do_vtable = (void*)DISPATCH_OBJ_SYNC_SLOW_BIT,
.dc_ctxt = (void*)sema,
};
_dispatch_queue_push(dq, (void *)&dss);
_dispatch_thread_semaphore_wait(sema);
_dispatch_put_thread_semaphore(sema);
// ...
}
这里利用了线程专属信号量,保证了每次只有一个 block 被执行。
这条调用栈有多个分支,如果向当前串行队列提交任务就会走到上述分支,导致死锁。如果是向其它串行队列提交 block,则会利用原子性操作来实现,因此不会有死锁问题。
dispatch_semaphore
关于信号量的 API 不多,主要是三个,create、wait 和 signal。
信号量在初始化时要指定 value,随后内部将这个 value 存储起来。实际操作时会存两个 value,一个是当前的 value,一个是记录初始 value。
信号的 wait 和 signal 是互逆的两个操作。如果 value 大于 0,前者将 value 减一,此时如果 value 小于零就一直等待。
初始 value 必须大于等于 0,如果为 0 并随后调用 wait 方法,线程将被阻塞直到别的线程调用了 signal 方法。
dispatch_semaphore_wait
首先从这个函数的源码看起:
long dispatch_semaphore_wait(dispatch_semaphore_t dsema, dispatch_time_t timeout) {
long value = dispatch_atomic_dec2o(dsema, dsema_value);
dispatch_atomic_acquire_barrier();
if (fastpath(value >= 0)) {
return 0;
}
return _dispatch_semaphore_wait_slow(dsema, timeout);
}
第一行的 dispatch_atomic_dec2o 是一个宏,会调用 GCC 内置的函数 __sync_sub_and_fetch,实现减法的原子性操作。因此这一行的意思是将 dsema 的值减一,并把新的值赋给 value。
如果减一后的 value 大于等于 0 就立刻返回,没有任何操作,否则进入等待状态。
_dispatch_semaphore_wait_slow 函数针对不同的 timeout 参数,分了三种情况考虑:
case DISPATCH_TIME_NOW:
while ((orig = dsema->dsema_value)
这种情况下会立刻判断 dsema->dsema_value 与 orig 是否相等。如果 while 判断成立,内部的 if 判断一定也成立,此时会将 value 加一(也就是变为 0) 并返回。加一的原因是为了抵消 wait 函数一开始的减一操作。此时函数调用方会得到返回值 KERN_OPERATION_TIMED_OUT,表示由于等待时间超时而返回。
实际上 while 判断一定会成立,因为如果 value 大于等于 0,在上一个函数 dispatch_semaphore_wait 中就已经返回了。
第二种情况是 DISPATCH_TIME_FOREVER 这个 case:
case DISPATCH_TIME_FOREVER:
do {
kr = semaphore_wait(dsema->dsema_port);
} while (kr == KERN_ABORTED);
break;
进入 do-while 循环后会调用系统的 semaphore_wait 方法,KERN_ABORTED 表示调用者被一个与信号量系统无关的原因唤醒。因此一旦发生这种情况,还是要继续等待,直到收到 signal 调用。
在其他情况下(default 分支),我们指定一个超时时间,这和 DISPATCH_TIME_FOREVER 的处理比较类似,不同的是我们调用了内核提供的 semaphore_timedwait 方法可以指定超时时间。
整个函数的框架如下:
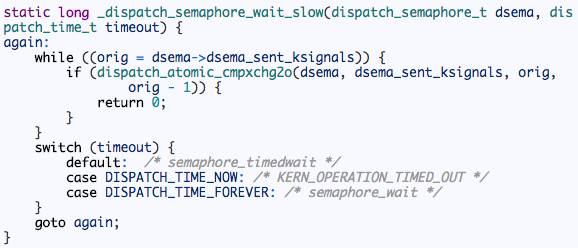
可见信号量被唤醒后,会回到最开始的地方,进入 while 循环。这个判断条件一般都会成立,极端情况下由于内核存在 bug,导致 orig 和 dsema_sent_ksignals 不相等,也就是收到虚假 signal 信号时会忽略。
进入 while 循环后,if 判断一定成立,因此返回 0,正如文档所说,返回 0 表示成功,否则表示超时。
dispatch_semaphore_signal
这个函数的实现相对来说比较简单,因为它不需要阻塞,只用唤醒。简化版源码如下:
long dispatch_semaphore_signal(dispatch_semaphore_t dsema) {
long value = dispatch_atomic_inc2o(dsema, dsema_value);
if (fastpath(value > 0)) {
return 0;
}
return _dispatch_semaphore_signal_slow(dsema);
}
首先会调用原子方法让 value 加一,如果大于零就立刻返回 0,否则返回 _dispatch_semaphore_signal_slow:
long _dispatch_semaphore_signal_slow(dispatch_semaphore_t dsema) {
(void)dispatch_atomic_inc2o(dsema, dsema_sent_ksignals);
_dispatch_semaphore_create_port(&dsema->dsema_port);
kern_return_t kr = semaphore_signal(dsema->dsema_port);
return 1;
}
它的作用仅仅是调用内核的 semaphore_signal 函数唤醒信号量,然后返回 1。这也符合文档中的描述:“如果唤醒了线程,返回非 0,否则返回 0”。
dispatch_group
有了上面的铺垫,group 是一个非常容易理解的概念,我们先看看如何创建 group:
dispatch_group_t dispatch_group_create(void) {
dispatch_group_t dg = _dispatch_alloc(DISPATCH_VTABLE(group), sizeof(struct dispatch_semaphore_s));
_dispatch_semaphore_init(LONG_MAX, dg);
return dg;
}
没错,group 就是一个 value 为 LONG_MAX 的信号量。
dispatch_group_async
它仅仅是 dispatch_group_async_f 的封装:
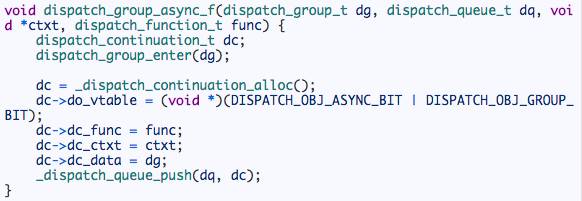
这个函数和 dispatch_async_f 的实现高度一致,主要的不同在于调用了 dispatch_group_enter 方法:
void dispatch_group_enter(dispatch_group_t dg) {
dispatch_semaphore_t dsema = (dispatch_semaphore_t)dg;
(void)dispatch_semaphore_wait(dsema, DISPATCH_TIME_FOREVER);
}
这个方法也没做什么,就是调用 wait 方法让信号量的 value 减一而已。
dispatch_group_wait
这个方法用于等待 group 中所有任务执行完成,可以理解为信号量 wait 的封装:
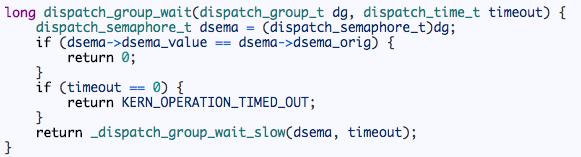
如果当前 value 和原始 value 相同,表明任务已经全部完成,直接返回 0,如果 timeout 为 0 也会立刻返回,否则调用 _dispatch_group_wait_slow。这个方法等等待部分和 _dispatch_semaphore_signal_slow 几乎一致,区别在于等待结束后它不是 return,而是调用 _dispatch_group_wake 去唤醒这个 group。
static long _dispatch_group_wait_slow(dispatch_semaphore_t dsema, dispatch_time_t timeout) {
again:
_dispatch_group_wake(dsema);
switch (timeout) {/* 三种情况分类 */}
goto again;
}
这里我们暂时跳过 _dispatch_group_wake,后面会有详细分析。只要知道这个函数在 group 中所有事件执行完后会被调用即可。
dispatch_group_notify
老习惯,这个函数仅仅是封装了 dispatch_group_notify_f:
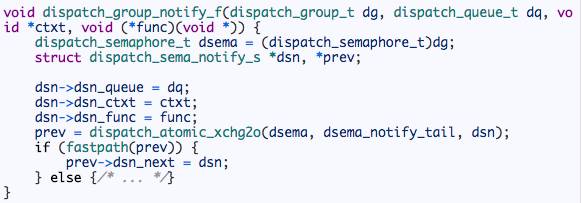
这种结构的代码我们已经遇到多次了,它其实就是在链表的尾部续上新的元素。所以 notify 方法并没有做过多的处理,只是是用链表把所有回调通知保存起来,等待调用。
dispatch_group_leave
在介绍 dispatch_async 函数时,我们看到任务在被执行时,还会调用 dispatch_group_leave 函数:

当 group 的 value 变为初始值时,表示所有任务都已执行完,开始调用 _dispatch_group_wake 处理回调。
_dispatch_group_wake
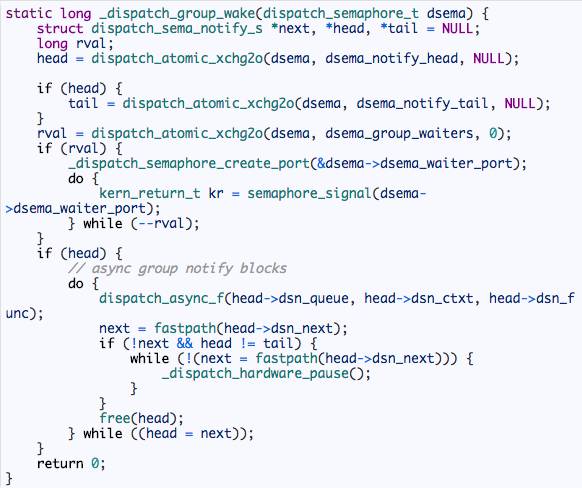
这个函数主要分为两部分,首先循环调用 semaphore_signal 告知唤醒当初等待 group 的信号量,因此 dispatch_group_wait 函数得以返回。
然后获取链表,依次调用 dispatch_async_f 异步执行在 notify 函数中注册的回调。
dispatch_once
dispatch_once 仅仅是一个包装,内部直接调用了 dispatch_once_f:
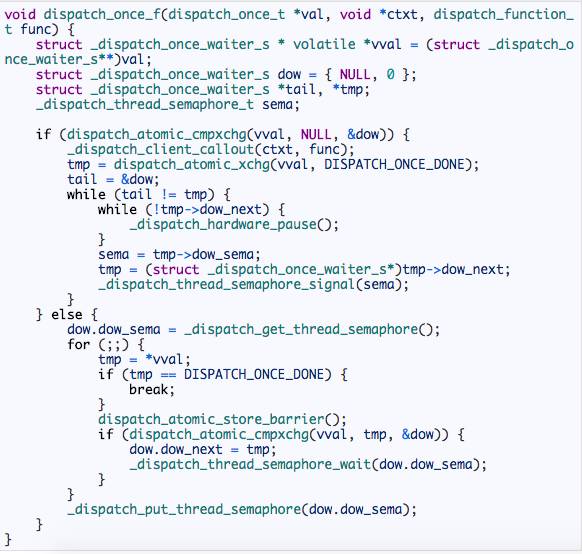
这段代码比较长,我们考虑三个场景:
-
第一次调用: 此时外部传进来的 onceToken 还是空指针,所以 vval 为 NULL,if 判断成立。首先执行 block,然后让将 vval 的值设为 DISPATCH_ONCE_DONE 表示任务已经完成,同时用 tmp 保存先前的 vval。此时,dow 也为空,因此 while 判断不成立,代码执行结束。
-
同一线程第二次调用: 由于 vval 已经变成了 DISPATCH_ONCE_DONE,因此 if 判断不成立,进入 else 分支的 for 循环。由于 tmp 就是 DISPATCH_ONCE_DONE,所以循环退出,没有做任何事。
-
多个线程同时调用: 由于 if 判断中是一个原子性操作,所以必然只有一个线程能进入 if 分支,其他的进入 else 分支。由于其他线程在调用函数时,vval 还不是 DISPATCH_ONCE_DONE,所以进入到 for 循环的后半部分。这里构造了一个链表,链表的每个节点上都调用了信号量的 wait 方法并阻塞,而在 if 分支中,则会依次遍历所有的节点并调用 signal 方法,唤醒所有等待中的信号量。
dispatch_barrier_async
它调用了 dispatch_barrier_async_f 函数,实现原理也和 dispatch_async_f 类似:
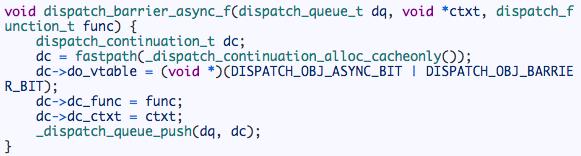
区别在于 do_vtable 被设置了两个标志位,多了一个 DISPATCH_OBJ_BARRIER_BIT 标记。这个标记在从队列中取出任务时被用到:

这里原来是一个循环,会拿出所有的任务,依次调用 _dispatch_continuation_redirect,最终并行处理。一旦遇到 DISPATCH_OBJ_BARRIER_BIT 这个标记,就会终止循环。
在 out 标签后面,返回了一个空的信号量,随后方法的调用者会把它单独放入队列,等待下一次执行:
void _dispatch_queue_invoke(dispatch_queue_t dq) {
_dispatch_thread_semaphore_t sema = _dispatch_queue_drain(dq);
if (sema) {
_dispatch_thread_semaphore_signal(sema);
} else if (tq) {
return _dispatch_queue_push(tq, dq);
}
}
因此 barrier 方法能等待此前所有任务执行完以后执行 _dispatch_queue_push,同时保证自己执行完以后才执行后续的操作。
dispatch_source
source 是一种资源,类似于 生产者/消费者模式中的生产者,而队列则是消费者。当有新的资源(source) 产生时,他们被放到对应的队列上被执行(消费)。
dispatch_source 最常见的用途之一就是用来实现定时器,举一个小例子:
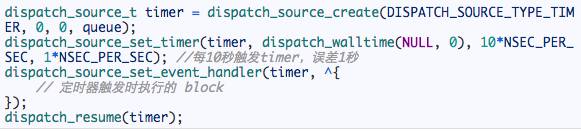
使用 GCD Timer 的好处在于不依赖 runloop,因此任何线程都可以使用。由于使用了 block,不会忘记避免循环引用。此外,定时器可以自由控制精度,随时修改间隔时间等。
dispatch_source_create
下面从底层源码的角度来研究这几行代码的作用。首先是 dispatch_source_create 函数,它和之前见到的 create 函数都差不多,对 dispatch_source_t 对象做了一些初始化工作:
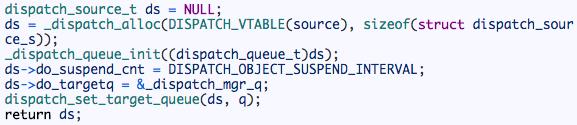
这里涉及到两个队列,其中 q 是用户指定的队列,表示事件触发的回调在哪个队列执行。而 _dispatch_mgr_q 则表示由哪个队列来管理这个 source,mgr 是 manager 的缩写,也是上文提到的序列号为 2 的内部队列。
dispatch_source_set_timer
在这个函数中,首先会有参数处理,过滤掉不符合要求的参数。随后创建了 dispatch_set_timer_params 类型的指针 params:
struct dispatch_set_timer_params {
dispatch_source_t ds;
uintptr_t ident;
struct dispatch_timer_source_s values;
};
这个 params 负责绑定定时器对象与他的参数(存储在 valus 属性中),最后调用:
dispatch_barrier_async_f((dispatch_queue_t)ds, params, _dispatch_source_set_timer2);
这里是把 source 当做队列来使用,因此实际上是调用了 _dispatch_source_set_timer2(params) 方法:
static void _dispatch_source_set_timer2(void *context) {
// Called on the source queue
struct dispatch_set_timer_params *params = context;
dispatch_suspend(params->ds);
dispatch_barrier_async_f(&_dispatch_mgr_q, params,
_dispatch_source_set_timer3);
}
这里首先暂停了队列,避免了修改的过程中定时器被触发。然后在 manager 队列上执行 _dispatch_source_set_timer3(params):
static void _dispatch_source_set_timer3(void *context) {
struct dispatch_set_timer_params *params = context;
dispatch_source_t ds = params->ds;
// ...
_dispatch_timer_list_update(ds);
dispatch_resume(ds);
}
_dispatch_timer_list_update 函数的作用是根据下一次触发时间将 timer 排序。
接下来,当初分发到 manager 队列的 block 将要被执行,走到 _dispatch_mgr_invoke 函数,其中有如下代码:
timeoutp = _dispatch_get_next_timer_fire(&timeout);
r = select(FD_SETSIZE, &tmp_rfds, &tmp_wfds, NULL, sel_timeoutp);
可见 GCD 的定时器是由系统的 select 方法实现的。
当内层的 manager 队列被唤醒后,还会进一步唤醒外层的队列(当初用户指定的那个),并在队列上执行 timer 触发时的 block。
dispatch_resume/suspend
GCD 对象的暂停和恢复由 do_suspend_cnt 决定,暂停时通过原子操作将改属性的值加 2,对应的在恢复时通过原子操作将该属性减二。
它有两个默认值:
#define DISPATCH_OBJECT_SUSPEND_LOCK 1u
#define DISPATCH_OBJECT_SUSPEND_INTERVAL 2u
在唤醒队列时有如下代码:
void _dispatch_queue_invoke(dispatch_queue_t dq) {
if (!dispatch_atomic_sub2o(dq, do_suspend_cnt, DISPATCH_OBJECT_SUSPEND_LOCK)) {
if (dq->dq_running == 0) {
_dispatch_wakeup(dq); // verify that the queue is idle
}
}
}
可见能够唤醒队列的前提是 dq->do_suspend_cnt - 1 = 0,也就是要求 do_suspend_cnt 的值就是 DISPATCH_OBJECT_SUSPEND_LOCK。
观察 8 个全局队列和主队列的定义就会发现,他们的 do_suspend_cnt 值确实为 DISPATCH_OBJECT_SUSPEND_LOCK,因此默认处于启动状态。
而 dispatch_source 的 create 方法中,do_suspend_cnt 的初始值为 DISPATCH_OBJECT_SUSPEND_INTERVAL,因此默认处于暂停状态,需要手动开启。
dispatch_after
dispatch_after 其实依赖于定时器的实现,函数内部调用了 dispatch_after_f:
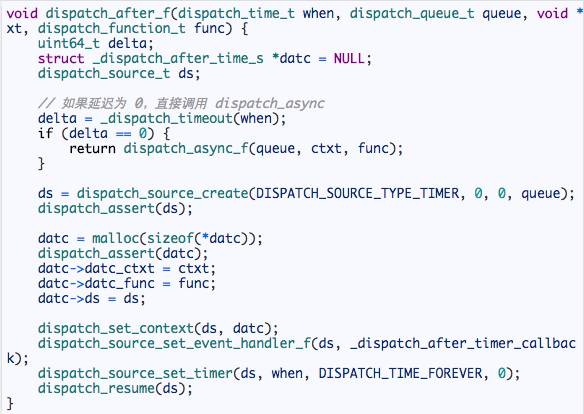
首先将延迟执行的 block 封装在 _dispatch_after_time_s 这个结构体中,并且作为上下文,与 timer 绑定,然后启动 timer。
到时以后,执行 _dispatch_after_timer_callback 回调,并取出上下文中的 block:
static void _dispatch_after_timer_callback(void *ctxt) {
struct _dispatch_after_time_s *datc = ctxt;
_dispatch_client_callout(datc->datc_ctxt, datc->datc_func);
// 清理工作
}
总结
本文主要整理了 GCD 中常见的 API 以及底层的实现原理。对于队列来说,需要理解它的数据结构,转发机制,以及底层的线程池模型。
dispatch_async 会把任务添加到队列的一个链表中,添加完后会唤醒队列,根据 vtable 中的函数指针,调用 wakeup 方法。在 wakeup 方法中,从线程池里取出工作线程(如果没有就新建),然后在工作线程中取出链表头部指向的 block 并执行。
dispatch_sync 的实现略简单一些,它不涉及线程池(因此一般都在当前线程执行),而是利用与线程绑定的信号量来实现串行。
分发到不同队列时,代码进入的分支也不一样,比如 dispatch_async 到主队列的任务由 runloop 处理,而分发到其他队列的任务由线程池处理。
在当前串行队列中执行 dispatch_sync 时,由于 dq_running 属性(表示在运行的任务数量) 为 1,所以以下判断成立:
if (slowpath(!dispatch_atomic_cmpxchg2o(dq, dq_running, 0, 1))) {
return _dispatch_barrier_sync_f_slow(dq, ctxt, func);
}
在 _dispatch_barrier_sync_f_slow 函数中使用了线程对应的信号量并且调用 wait 方法,从而导致线程死锁。
如果向其它队列同步提交 block,最终进入 _dispatch_barrier_sync_f_invoke,它只是保证了 block 执行的原子性,但没有使用线程对应的信号量。
对于信号量来说,它主要使用 signal 和 wait 这两个接口,底层分别调用了内核提供的方法。在调用 signal 方法后,先将 value 减一,如果大于零立刻返回,否则陷入等待。signal 方法将信号量加一,如果 value 大于零立刻返回,否则说明唤醒了某一个等待线程,此时由系统决定哪个线程的等待方法可以返回。
dispatch_group 的本质就是一个 value 非常大的信号量,等待 group 完成实际上就是等待 value 恢复初始值。而 notify 的作用是将所有注册的回调组装成一个链表,在 dispatch_async 完成时判断 value 是不是恢复初始值,如果是则调用 dispatch_async 异步执行所有注册的回调。
dispatch_once 通过一个静态变量来标记 block 是否已被执行,同时使用信号量确保只有一个线程能执行,执行完 block 后会唤醒其他所有等待的线程。
dispatch_barrier_async 改变了 block 的 vtable 标记位,当它将要被取出执行时,会等待前面的 block 都执行完,然后在下一次循环中被执行。
dispatch_source 可以用来实现定时器。所有的 source 会被提交到用户指定的队列,然后提交到 manager 队列中,按照触发时间排好序。随后找到最近触发的定时器,调用内核的 select 方法等待。等待结束后,依次唤醒 manager 队列和用户指定队列,最终触发一开始设置的回调 block。
GCD 中的对象用 do_suspend_cnt 来表示是否暂停。队列默认处于启动状态,而 dispatch_source 需要手动启动。
dispatch_after 函数依赖于 dispatch_source 定时器,它只是注册了一个定时器,然后在回调函数中执行 block。
参考资料
-
Why do we use __builtin_expect when a straightforward way is to use if-else
-
Posix线程编程指南(2) 线程私有数据
-
选择 GCD 还是 NSTimer?
-
从NSTimer的失效性谈起(二):关于GCD Timer和libdispatch
-
变态的libDispatch源码分析
以上是关于深入理解 GCD的主要内容,如果未能解决你的问题,请参考以下文章