DeepLabv3+图像语义分割实战:训练自己的数据集
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了DeepLabv3+图像语义分割实战:训练自己的数据集相关的知识,希望对你有一定的参考价值。
DeepLabv3+是一种非常先进的基于深度学习的图像语义分割方法,可对物体进行像素级分割。本课程将手把手地教大家使用labelme图像标注工具制造自己的数据集,并使用DeepLabv3+训练自己的数据集,从而能开展自己的图像分割应用。
课程链接:https://edu.51cto.com/course/18817.html
本课程有两个项目实践:
(1) CamVid语义分割 :对CamVid数据集进行语义分割
(2) RoadScene语义分割:对汽车行驶场景中的路坑、车、车道线等进行物体标注和语义分割
本课程使用TensorFlow版本的DeepLabv3+,在Ubuntu系统上做项目演示。 包括:安装deeplab、数据集标注、数据集格式转换、修改程序文件、训练自己的数据集、测试训练出的网络模型、性能评估。
本课程提供项目的数据集和python程序文件。
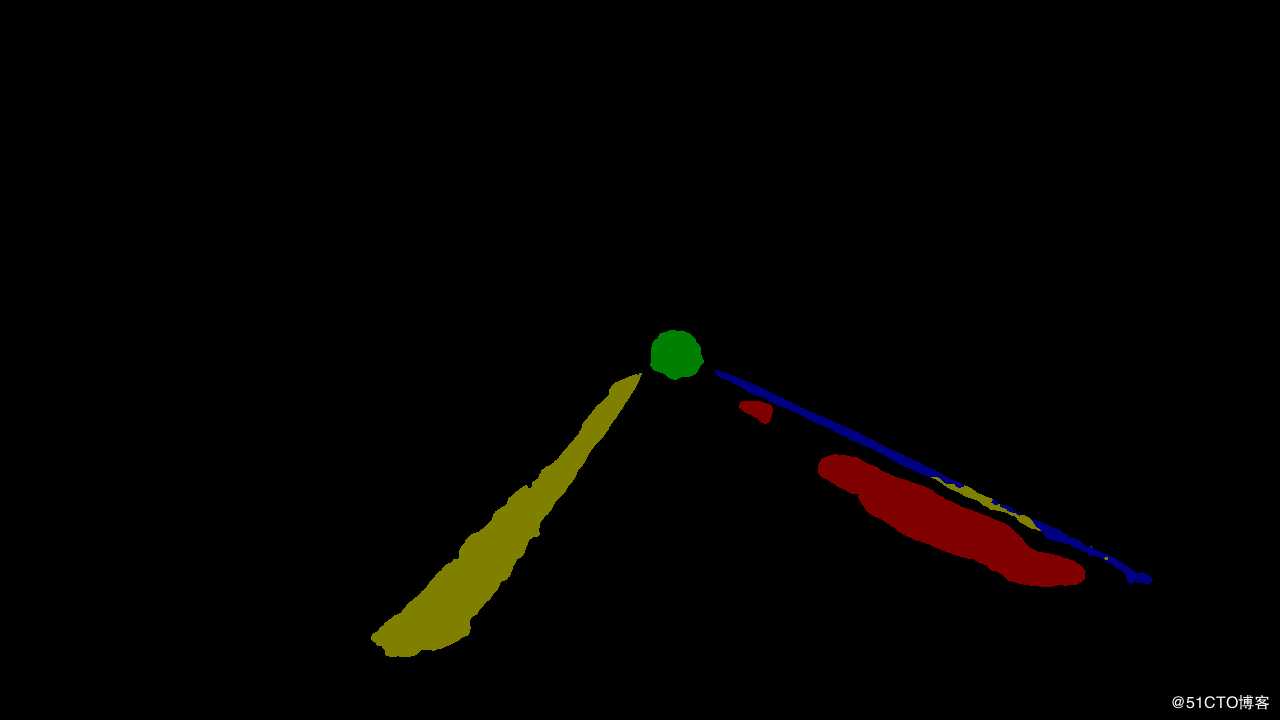
下图是使用DeepLabv3+训练自己的数据集RoadScene进行图像语义分割的测试结果:

以上是关于DeepLabv3+图像语义分割实战:训练自己的数据集的主要内容,如果未能解决你的问题,请参考以下文章
Swin Transformer实战实例分割:训练自己的数据集