理解Faster-RCNN 中的Anchor
Posted yuanmingzhou
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了理解Faster-RCNN 中的Anchor相关的知识,希望对你有一定的参考价值。
先上图看一下Faster R-CNN操作流程:
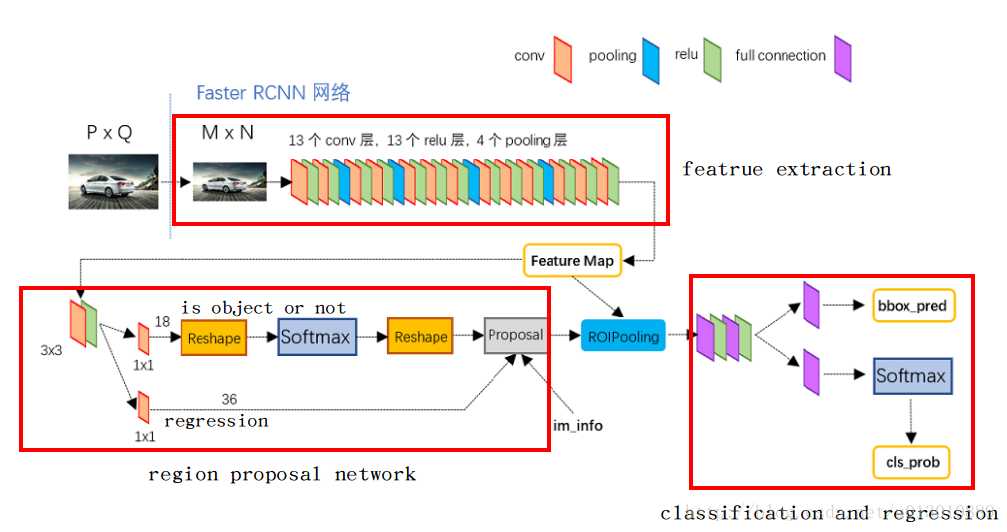
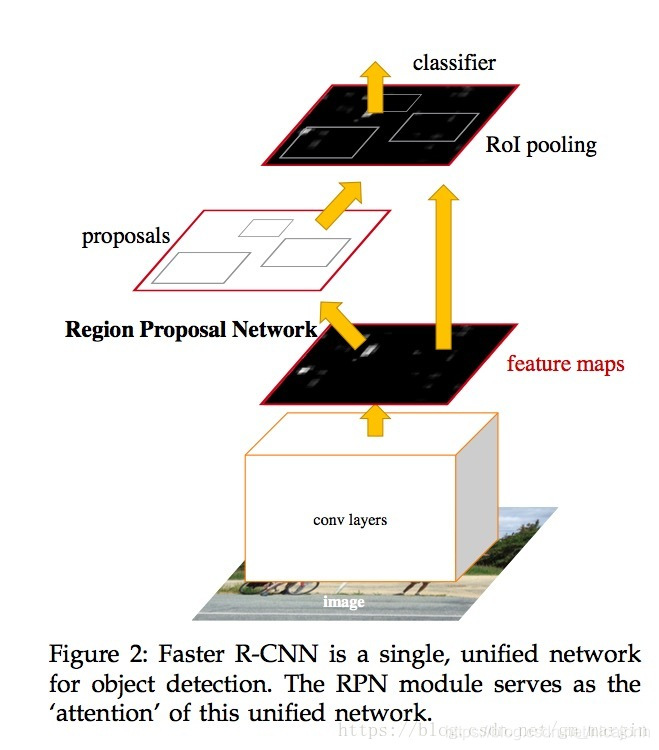
图片说明:Faster R-CNN=Fast R-CNN+RPN,其中Fast R-CNN结构不变;RPN负责生成proposals,配合最后一层的feature map,使用ROI Pooling,生成fixed length的feature vector。我们详细讨论一下RPN的操作过程
图片说明,红框只是一个滑窗的操作过程,注意这里的anchor是原图像像素空间,而不是feature map上的。这样
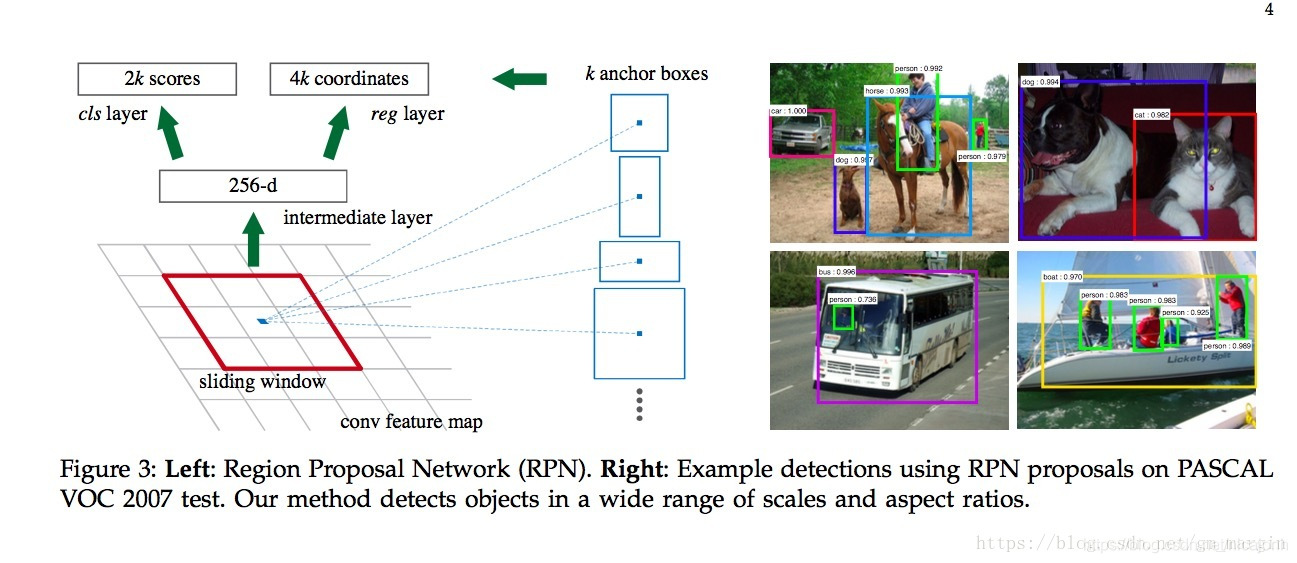
anchor是RPN的核心:
假设我们现在得到的feature map为W * H * C(13 * 13 * 256就是feature map的width=13,height=13,channel=256),我们如何产生网络需要的proposals呢?我们在feature map使用滑动窗口的操作方式(stride=1,padding=1),当前滑窗的中心在原像素空间的映射点称为anchor,以此anchor为中心,生成k(paper中default k=9, 3 scales and 3 aspect ratios)个proposals。
在此feature map滑动一个mini-network,这个network输入是3 * 3 * 256,经过3 * 3 * 256 * 256的卷积,得到1 * 1 * 256的低维向量;接下来进行分类:①Classification:经过1 * 1 * 256 * 18的卷积核,得到1 * 1 * 18的feature vector,分别代表9个proposals的是/不是Object的概率(这里有一个疑惑,为什么要生成一对?生成一个是Object的概率不就好了?也许是为了设计方便?);②Regression:经过1 * 1 * 256 * 36的卷积核,得到1 * 1 * 36的feature vector,分别代表9个proposals的(center_x,center_y,w,d)。
上述操作只是一个3 * 3的滑动窗口的操作过程,实际操作过程中,必须将13 * 13的feature map均执行一边;于是在RPN中,产生了两个损失函数:①Classification loss②Regression loss。
这样的话,通过滑动窗口和anchor机制,我们就可以找到固定比例、一定大小的proposals:①物体大小不同导致的proposal被覆盖②物体aspects ratios不同导致proposals也被覆盖
由上可知,NRP可以代替Selective Search产生proposals,而且最关键的一点是RPN 更快
ROI pooling V.S. SSP Pooling
ROI是只有一层的SSP Pooling:ROI Pooling将proposal在feature map上的对应区域分为W * H 份,每一份取Max/Avg 将其放到固定位置
SSP Pooling是将proposal分为(4 * 4 / 2 * 2 / 1 * 1份,然后进行拼接,得到fixed length=21的feature vector)
以上是关于理解Faster-RCNN 中的Anchor的主要内容,如果未能解决你的问题,请参考以下文章