[Operating System] {ud923} == Sample Final Questions ==
Posted ecoflex
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了[Operating System] {ud923} == Sample Final Questions ==相关的知识,希望对你有一定的参考价值。
Sample Final Solutions
Page 1 of 8
CS 8803, Spring 2015.
1. Timeslices
Problem
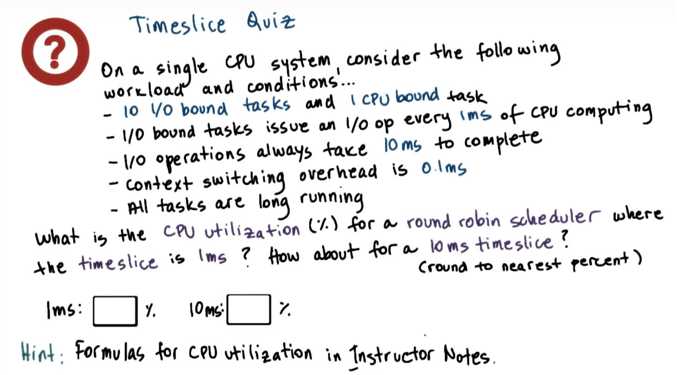
On a single CPU system, consider the following workload and conditions:
-
10 I/O-bound tasks and 1 CPU-bound task
-
I/O-bound tasks issue an I/O operation once every 1 ms of CPU computing
-
I/O operations always take 10 ms to complete
-
Context switching overhead is 0.1 ms
-
I/O device(s) have infinite capacity to handle concurrent I/O requests
-
All tasks are long-running
Now, answer the following questions (for each question, round to the nearest percent):
- What is the CPU utilization (%) for a round-robin scheduler where the timeslice is 20 ms?
- What is the I/O utilization (%) for a round-robin scheduler where the timeslice is 20 ms?
Analysis:
Round Robin Scheduling
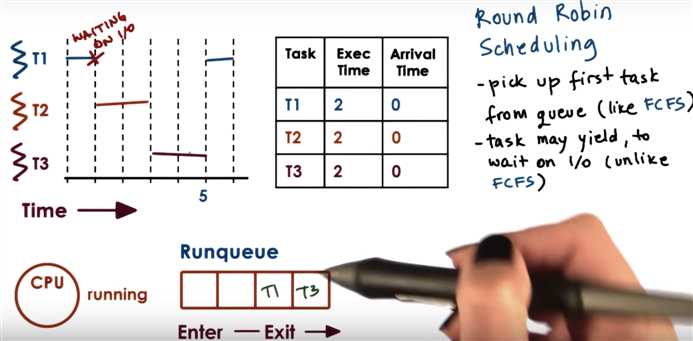
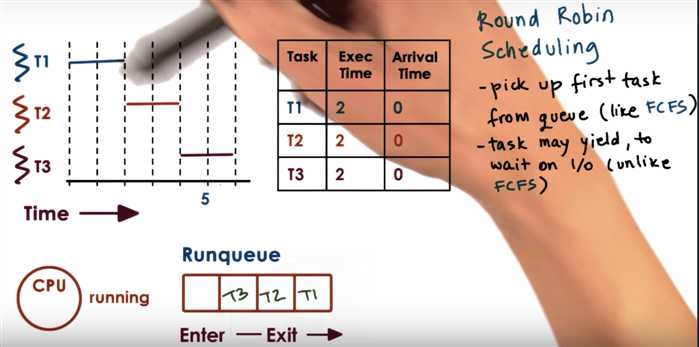
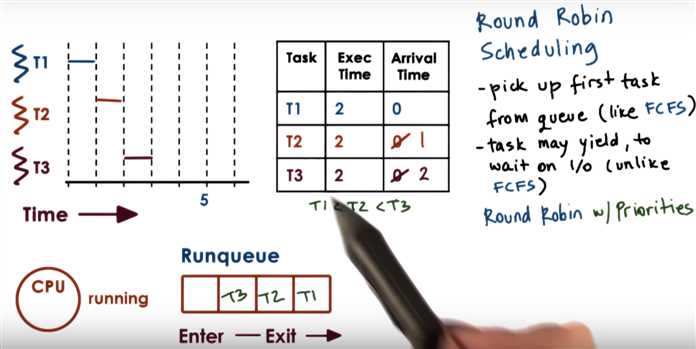
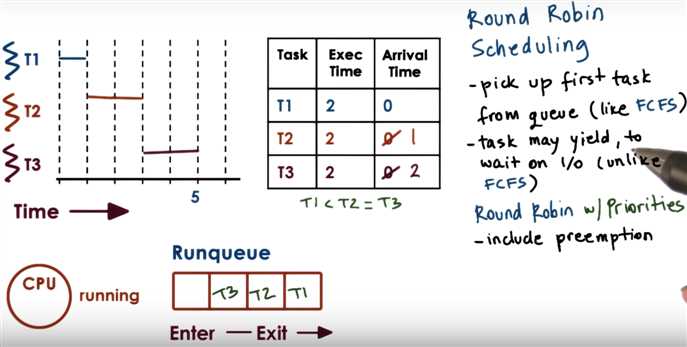
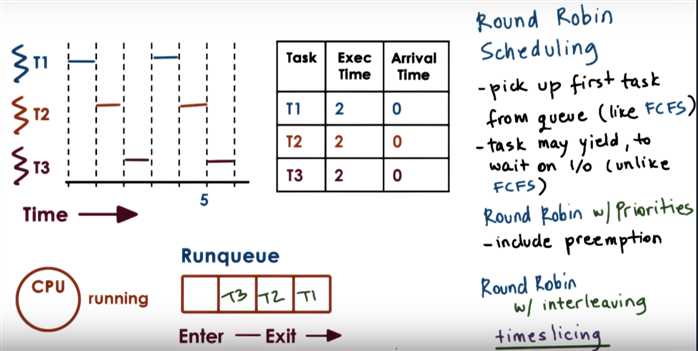
Round-robin rule is: if a task doesn‘t end by itself, end it at each time slice ending (20ms here)
For CPU utility:
There‘re 11 tasks in total, so the CPU running time in a round => 10 I/O-bound tasks cost 10*1ms; 1 CPU-bound task costs 20ms
=> also there‘re 11 context switching => 11*0.1ms wasted in a round => CPU utility = ?
For I/O utility:
Since the the I/O device has infinite ability for concurrency => total I/O device working time in a round = I/O device ending time - starting time
(ps, "all tasks are long-running" => we can assume in a round, the 10 I/O-bound tasks start, then the CPU-bound task starts.)
From another quiz:
![]()

For the case when we have a round robin scheduler with a 10 ms timeslice, as we‘re going through the 10 I/O bound tasks,
every single one of them will run just for 1ms and then we will have to stop because of issuing an I/O request, so we‘ll have them context switch in that case.
From CPU utilization perspective, having a large timeslice that favors the CPU bound task is better.
Quiz Help
CPU Utilization Formula:
- [cpu_running_time / (cpu_running_time + context_switching_overheads)] * 100
- The cpu_running_time and context_switching_overheads should be calculated over a consistent, recurring interval
Helpful Steps to Solve:
- Determine a consistent, recurring interval
- In the interval, each task should be given an opportunity to run
- During that interval, how much time is spent computing? This is the cpu_running_time
- During that interval, how much time is spent context switching? This is the context_switching_overheads
- Calculate!
Solution
-
CPU utilization
-
((10 * 1ms) + 1 * 20ms) / ((10 * 1ms) + 1 * 20ms + 11 * 0.1ms ) = 30 / 31.1 = 97%
-
I/O utilization
-
the first I/O request is issued at 1 ms time
-
the last I/O request is issued at (1 ms + 9 * 1ms + 9 * 0.1) = 10.9 ms, and it will take 10 ms to complete, so it will complete at 20.9 ms
-
total time there are I/O requests being processed is 20.9 - 1 = 19.9 ms
-
the CPU bound task will complete at time 31.1 ms (which is also the total time for the set of tasks)
-
19.9 / 31.1 = 64%
2. Linux O(1) Scheduler
For the next four questions, consider a Linux system with the following assumptions:
- uses the O(1) scheduling algorithm for time sharing threads
- must assign a time quantum for thread T1 with priority 110
- must assign a time quantum for thread T2 with priority 135
Provide answers to the following:
- Which thread has a "higher" priority (will be serviced first)?
- Which thread is assigned a longer time quantum?
- Assume T2 has used its time quantum without blocking. What will happen to the value that represents its priority level when T2 gets scheduled again?
- lower/decrease
- higher/increase
- same
- Assume now that T2 blocks for I/O before its time quantum expired. What will happen to the value that represents its priority level when T2 gets scheduled again?
- lower/decrease
- higher/increase
- same
Recall:
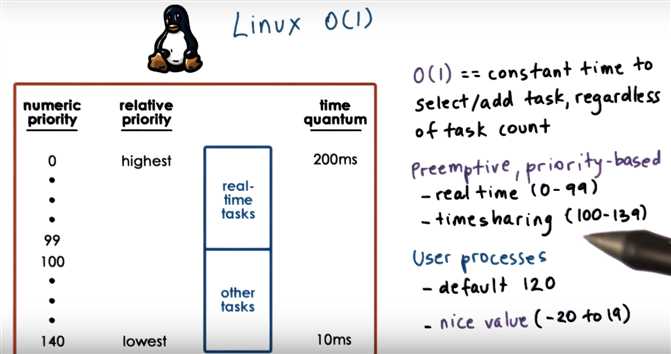
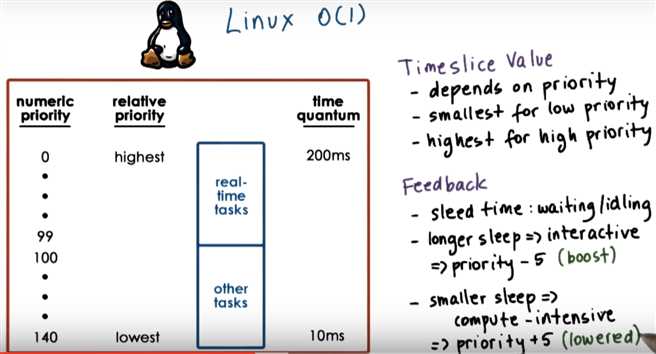
Linux O(1) Scheduler
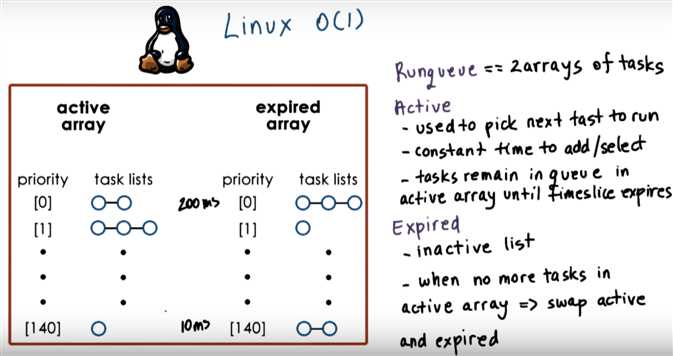
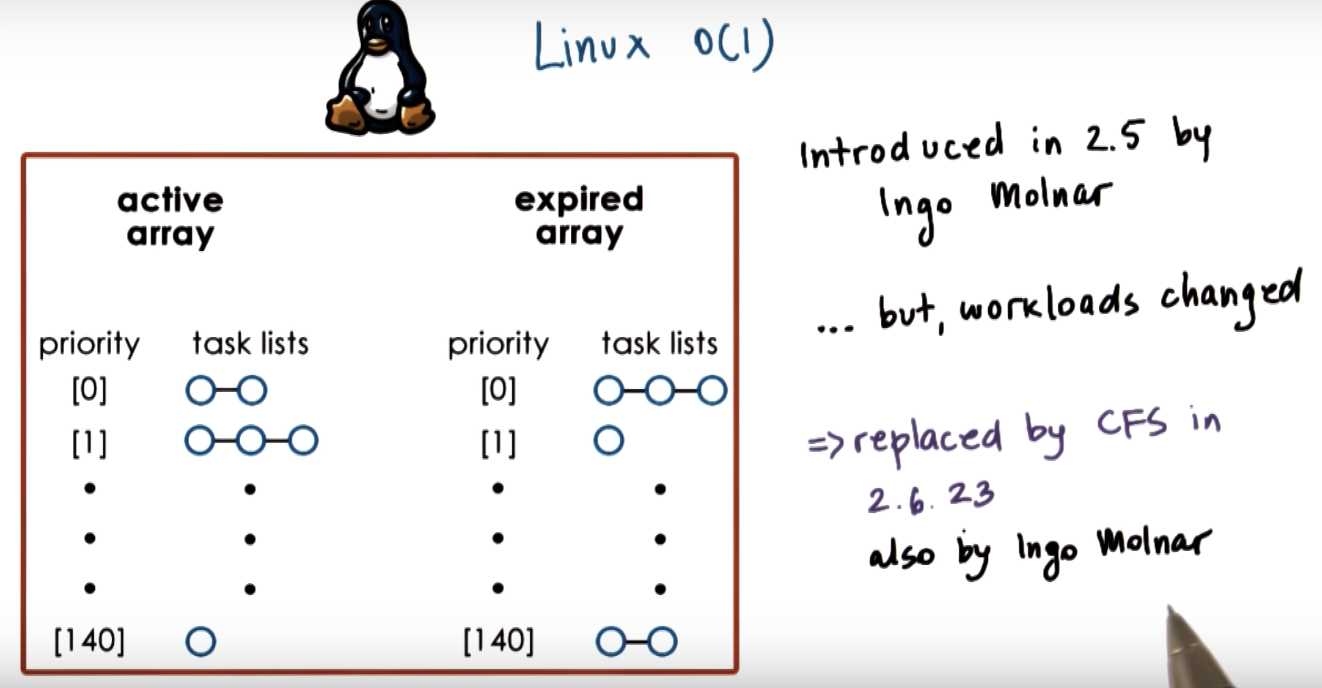
Solution
-
t1 (in O(1) lower priority => greater numerical value; so t1 has higher priority)
-
t1 (in O(1) lower priority tasks => smaller time quantum; so t1 will have longer time quantum)
-
increase (since it used up all of its quantum without blocking, it means that it’s CPU bound, so it’s priority level should be lowered, which means the numerical value of its priority should be increased)
-
decrease (since it blocked, it’s more I/O intensive, will get a boost in priority, which means that the numerical value will be decreased)
3. Hardware Counters
Consider a quad-core machine with a single memory module connected to the CPU‘s via a shared “bus”. On this machine, a CPU instruction takes 1 cycle, and a memory instruction takes 4 cycles.
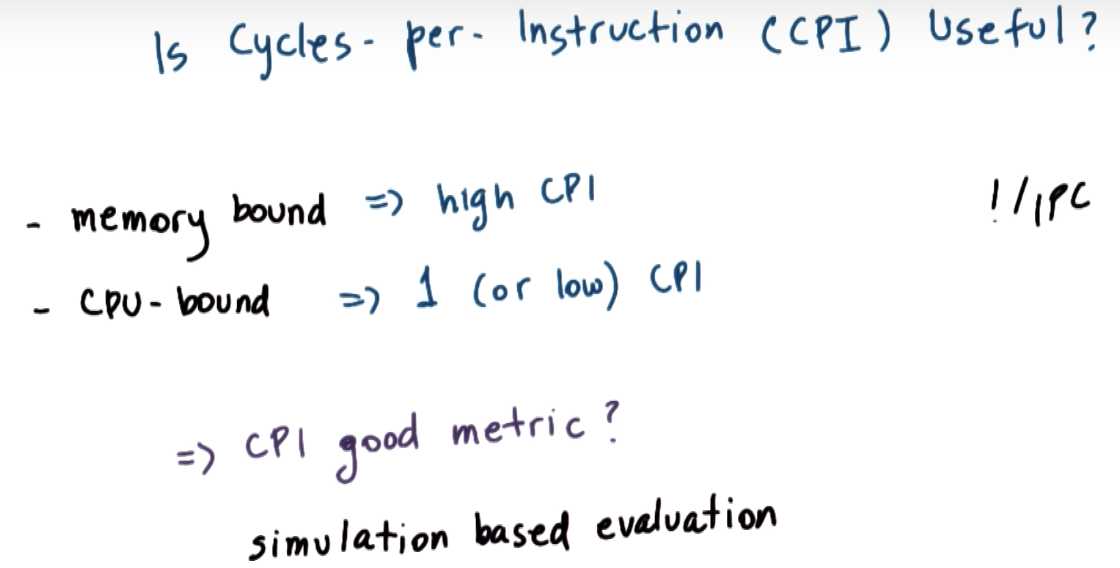
The machine has two hardware counters:
- counter that measures IPC
- counter that measures CPI
Answer the following:
- What does IPC stand for in this context?
- What does CPI stand for in this context?
- What is the highest IPC on this machine?
- What is the highest CPI on this machine?
Scheduling with Hardware Counters
Solution
-
instructions per cycle
-
cycles per instruction
-
4 (best case scenario: if all cores execute CPU-bound instructions, 4 instructions can be completed in a single cycle)
-
16 (worst case scenario: if all cores issue a memory instruction at the same time, the instructions will contend on the shared bus and the shared memory controller. so one of them can take up to 4 * 4 cycles = 16 cycles to complete)
4. Synchronization
In a multi-processor system, a thread is trying to acquire a locked mutex.
- Should the thread (1)spin until the mutex is released or (2)block?
- Why might it be better to spin in some instances?
- What if this were a uniprocessor system?
Solution
-
If owner of mutex is running on a another CPU -> spin; otherwise block
-
Owner may release mutex quickly; may be faster to wait for owner to complete than to pay overhead for context switching twice.
-
On uniprocessor, always block, there is no way for owner to be running at the same time, since there is only CPU.
5. Spinlocks
For the following question, consider a multi-processor with write-invalidated cache coherence.
Determine whether the use of a dynamic (exponential backoff) delay has the same, better, or worse performance than a test-and-test-and-set (“spin on read”) lock. Then, explain why.
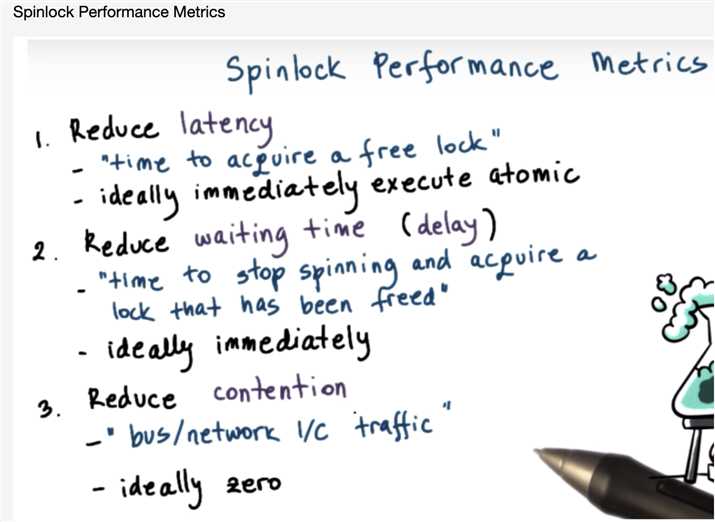
Make a performance comparison using each of the following metrics:
- Latency
- Delay
- Contention
dynamic (exponential backoff) delay :
test-and-test-and-set (“spin on read”) lock
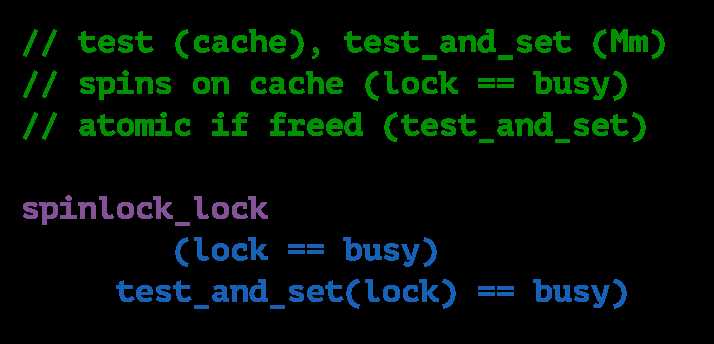
recall:
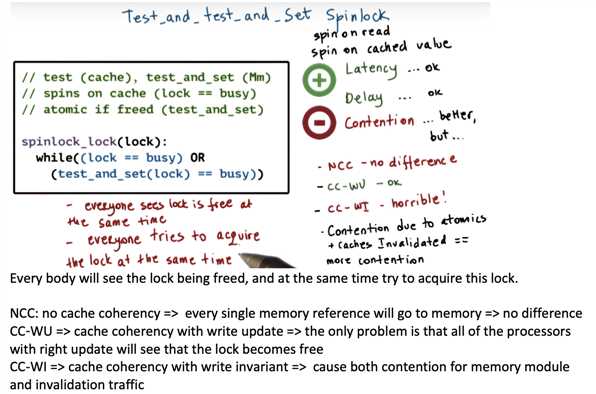
Solution
-
same. if you look at the pseudocode for the two algorithms, if the lock is free then exactly the same operations will be executed in both cases.
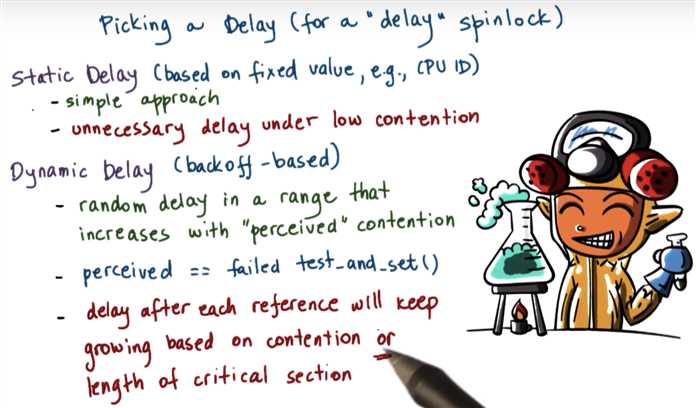
-
worse. because of the delay, the lock may be released while delaying, so the overall time that it will take to acquired a freed lock will be potentially longer
-
better. in the delayed algorithm, some of the invalidations are not observed because of the wait, so those will not trigger additional memory accesses, therefore overall memory bus/interconnect contention is improved.
6. Page Table Size
Consider a 32-bit (x86) platform running Linux that uses a single-level page table. What are the maximum number of page table entries when the following page sizes are used?
- regular (4 kB) pages?
- large (2 MB) pages?
recall:
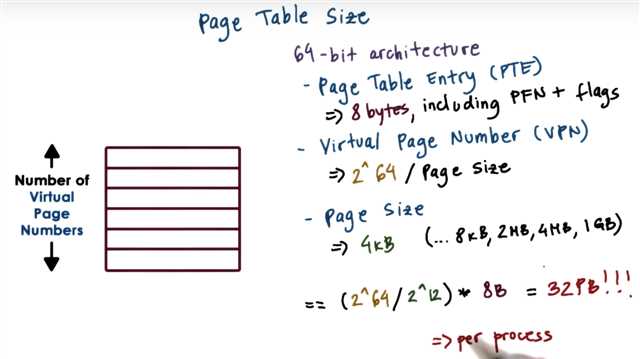
Page Table Size
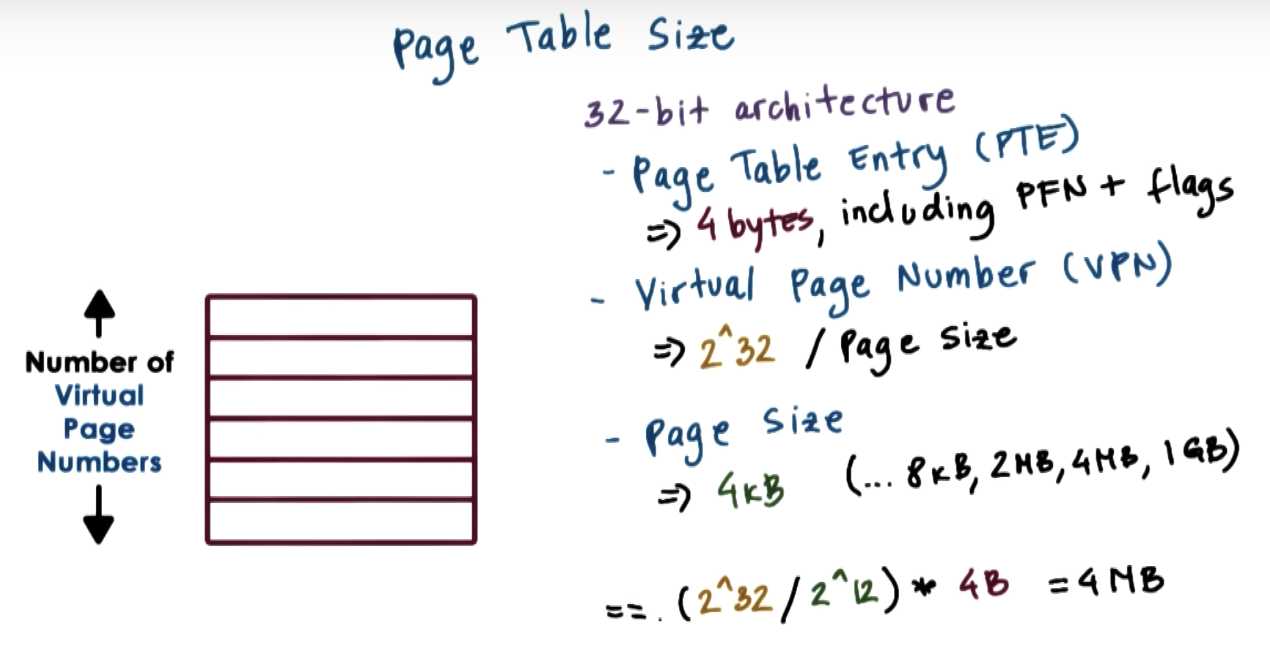
page size => size of offset region => size of each frame in physical memory (fixed and small)
page table is a map, transforming a page index of the virtual memory to a frame index of the physical memory.
Solution
-
regular 4kB pages: 32 - 12 bits = 20bits => need 2^20 entries for each virtual page
-
large 2MB pages: 32 - 21bits = 11 bits => need 2^11 entries for each virtual page
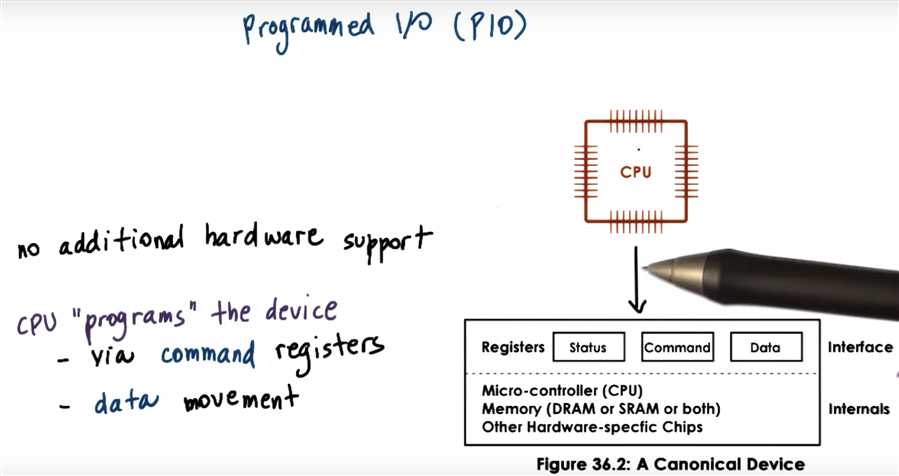
7. PIO
Answer the following questions about PIO:
- Considering I/O devices, what does PIO stand for?
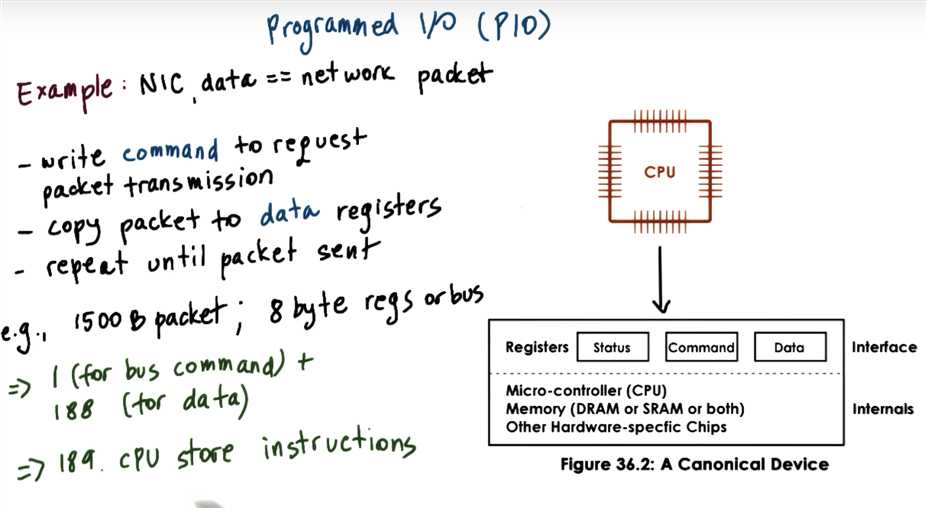
- List the steps performed by the OS or process running on the CPU when sending a network packet using PIO.
recall:
Method1:Device Access PIO
Solution
-
programmed I/O
-
write ‘command’ to the device to send a packet of appropriate size; copy the header and data in a contiguous memory location; copy data to NIC / device data transfer registers; read status register to confirm that copied data was successfully transmitted; repeat last two steps as many times as needed to transmit the full packet, until end-of-packet is reached.
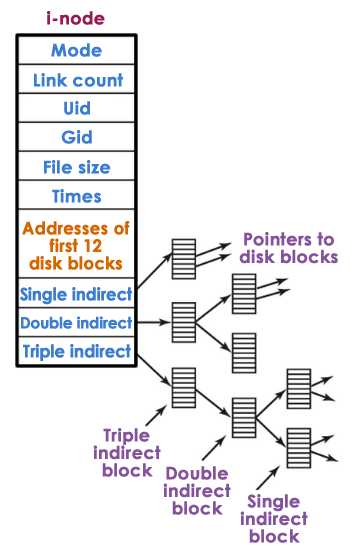
8. inode Structure
Assume an inode has the following structure:
![inode-structure] (https://s3.amazonaws.com/content.udacity-data.com/courses/ud923/notes/ud923-final-inodes.png)
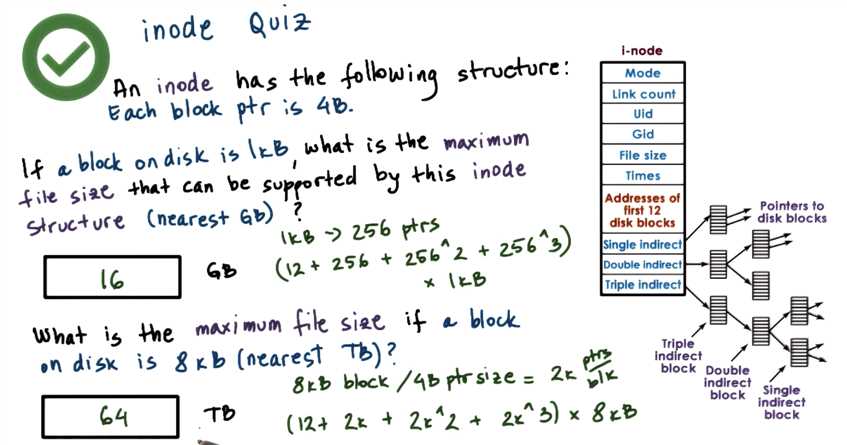
Also assume that each block pointer element is 4 bytes.
If a block on the disk is 4 kB, then what is the maximum file size that can be supported by this inode structure?
recall:
Maximum File Size:
- number_of_addressable_blocks * block_size
- number_of_addressable_blocks = 12 + blocks_addressable_by_single_indirect + blocks_addressable_by_double_indirect + blocks_addressable_by_triple_indirect
You do not have to include units in your answers.
ERRATA
Properly rounding up the first answer results in 17GB or 16GiB (where GB is 10^(33) and GiB is 2^(310).
Solution
For 4KB = 4kB / 4 = 1k elements: (12 * 4kB) + (1k * 4kB) + (1k^2 * 4kB) + (1k^3 * 4kB) = …
Approx (using last term only) = (2^10)^3 * (2^2)*(2^10) = 2^(30+2+10) = 4TB
9. RPC Data Types
A RPC routine get_coordinates() returns the N-dimensional coordinates of a data point, where each coordinate is an integer.
Write the elements of the C data structure that corresponds to the 3D coordinates of a data point.
recall:
Marshalling
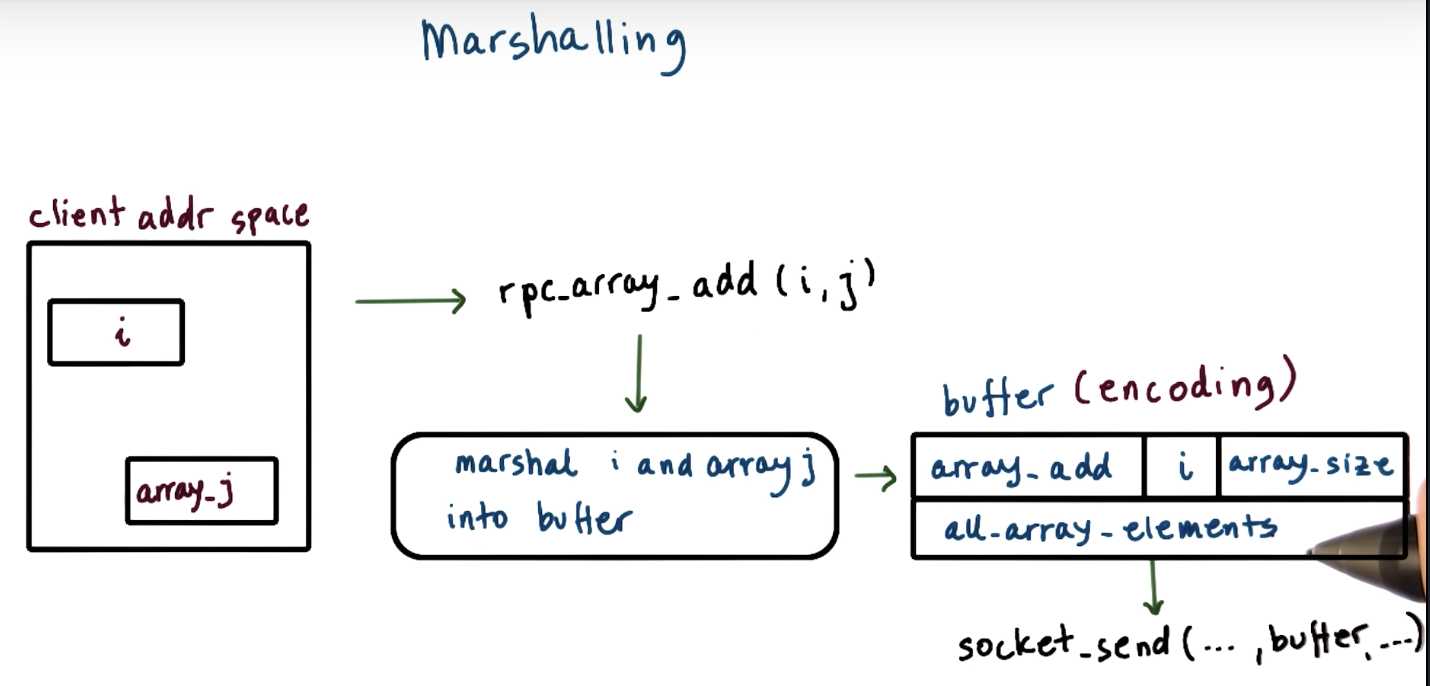
The encoding specifies the data layout when it‘s serialized to the bytee stream, so that anybody that looks at it can actually make sense of it.
Solution
The return value will be an array of N integers. Since it’s not specified what is the value of N, the type of the return argument in XDR will be defined as a variable length array of integers:
int data<>
When compiled with rpcgen, this data type will correspond to a data structure in C with two elements, an integer—len—that correspond to the value of N, and a pointer to an integer— val—which will correspond to the pointer to the integer array.
-
int len (or length)
-
int * val (or value… )
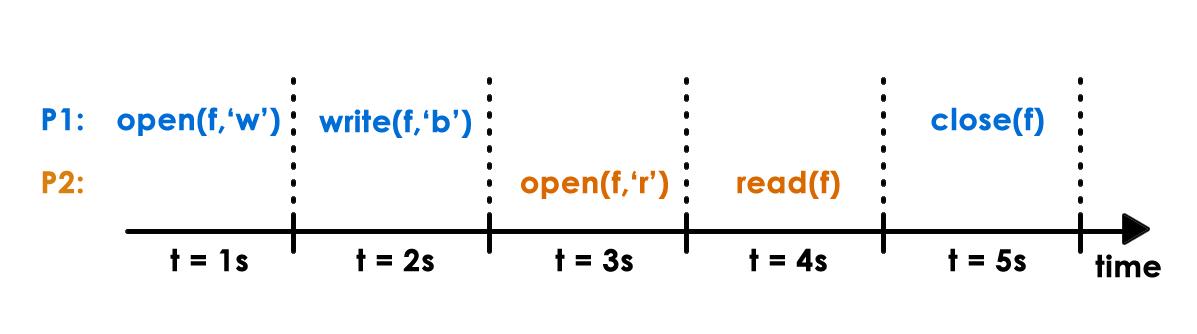
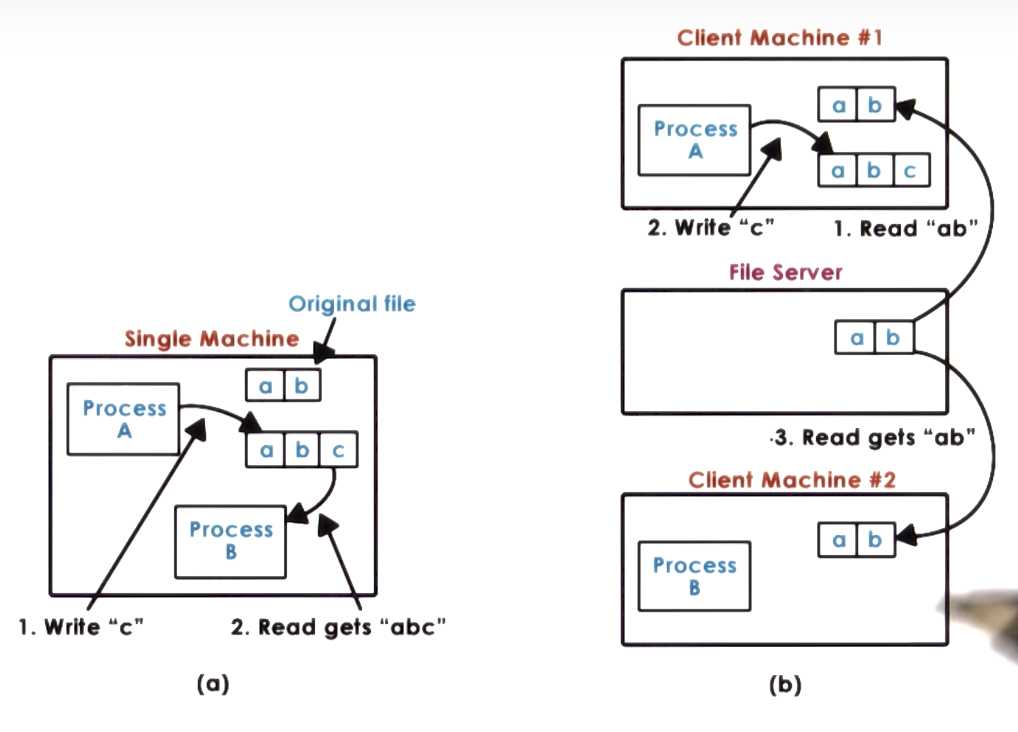
10. DFS Semantics
Consider the following timeline where ‘f’ is distributed shared file and P1 and P2 are processes:
Other Assumptions:
- ‘t‘ represents the time intervals in which functions execute
- the ‘w’ flag means write/append
- the ‘r’ flag means read
- the original content of ‘f‘ was “a”
- the read() function returns the entire contents of the file
For each of the following DFS semantics, what will be read -- the contents of ‘f‘ -- by P2 when t = 4s?
- UNIX semantics
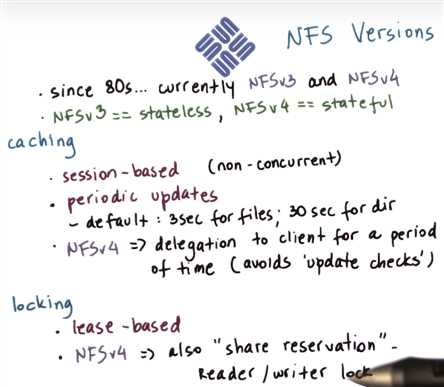
- NFS semantics
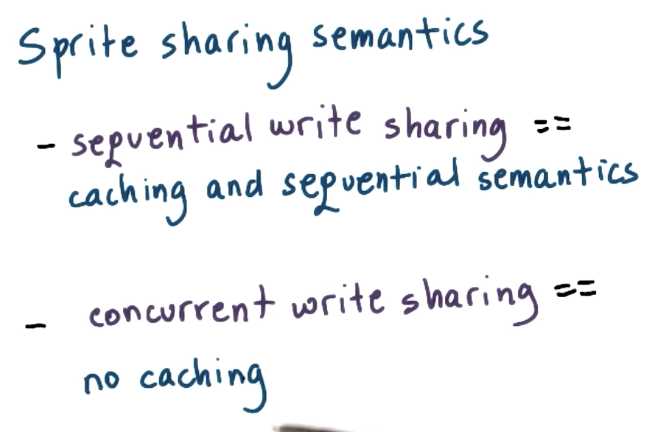
- Sprite semantics
recall:
File Sharing Semantics on a DFS

NFS Versions
Solution
-
UNIX: ab (all updates are instantaneously visible)
-
NSF: a (session semantics, + period updates, but for files that’s 3sec, so the write at t=2s would not propagate)
- Sprite: ab (server will check with current writer P1 what’s the most recent value before returning to reader P2)
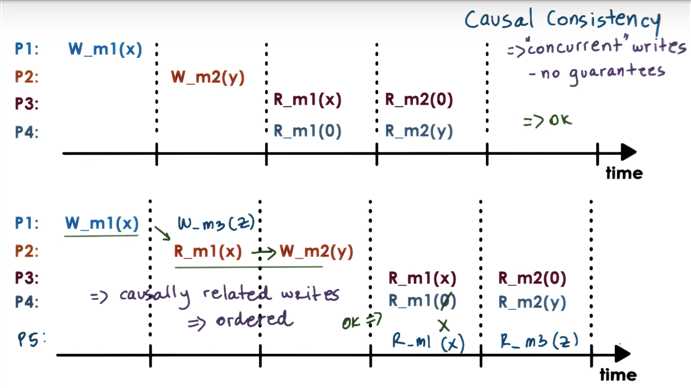
11. Consistency Models
Consider the following sequence of operations by processors P1, P2, and P3 which occurred in a distributed shared memory system:
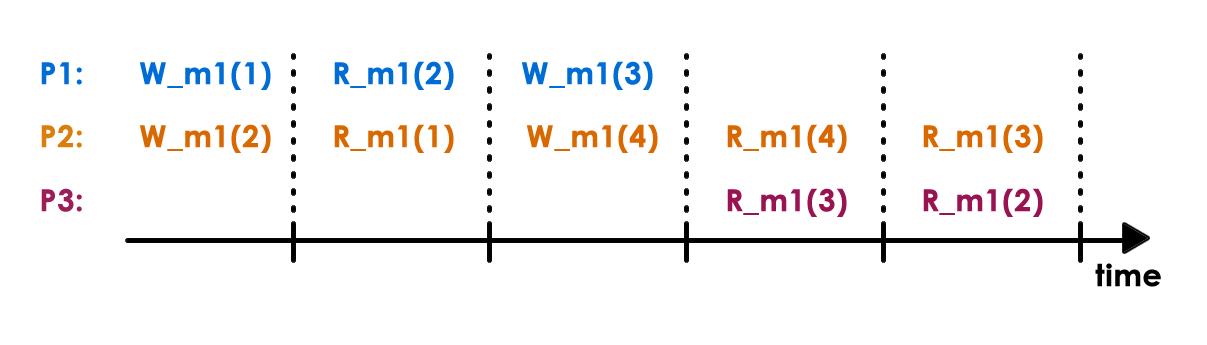
Notation
- R_m1(X) => X was read from memory location m1 (does not indicate where it was stored)
- W_m1(Y) => Y was written to memory location m1
- Initially all memory is set to 0
Answer the following questions:
- Name all processors (P1, P2, or P3) that observe causally consistent reads.
- Is this execution causally consistent?
recall:
Causal Consistency
Solution
-
P1 and P2 only.
-
No. W_m1(3)@P1 and W_m1(2)@ P2 are causally related (via R_m1(2) @P1), so these two writes cannot be seen in reverse order, as currently seen by P3. P3 doesn’t observe causally consistent reads.
12. Distributed Applications
You are designing the new image datastore for an application that stores users’ images (like Picasa). The new design must consider the following scale:
- The current application has 30 million users
- Each user has on average 2,000 photos
- Each photo is on average 500 kB
- Requests are evenly distributed across all images
Answer the following:
- Would you use replication or partitioning as a mechanism to ensure high responsiveness of the image store?
- If you have 10 server machines at your disposal, and one of them crashes, what’s the percentage of requests that the image store will not be able to respond to, if any?
Solution
-
Partitioning. Current data set is ~30 PB, so cannot store it on one machine
-
10% since requests are evenly distributed.
以上是关于[Operating System] {ud923} == Sample Final Questions ==的主要内容,如果未能解决你的问题,请参考以下文章
[Operating System] {ud923} P3L4: Synchronization Constructs
[Operating System] {ud923} P4L4: Datacenter Technologies
[Operating System] {ud923} P3L3: Inter-Process Communication
Introduction to operating systems----《Computer operating system》