重新审视进程间的通信
Posted penguin_wwy
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了重新审视进程间的通信相关的知识,希望对你有一定的参考价值。
最近干活的时候又被Linux管道和消息队列搞的一脸懵逼。当初自己走马观花似的学习以为内容很简单,结果留下了大坑,借来Unix网络编程来补补,重新审视这两个部分,并且引以为戒!!!
首先看管道
#include<unistd.h>
int pipe(int fd[2]);灵魂作图
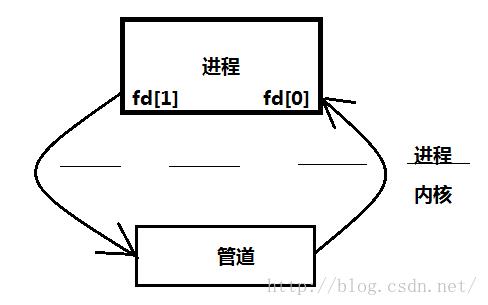
单进程管道
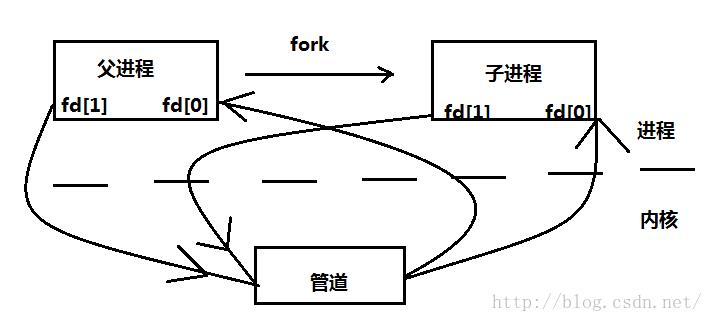
刚fork后
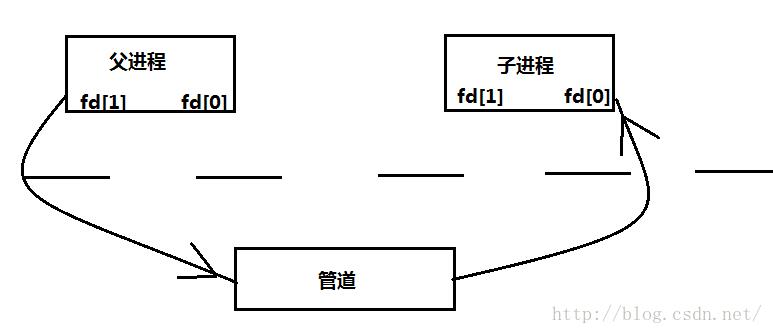
父进程关闭管道读出端,子进程关闭管道写入端,在父子进程间提供一个单向数据流
管道只能用于父子进程或者兄弟进程间通信,也就是说管道只能用于具有亲缘关系的进程间通信
管道的缓冲区大小是受限制的。管道所传输的是无格式的字节流。这就需要管道输入方和输出方事先约定好数据格式
有名管道可用于没有亲缘关系的进程间通信(name pipe或者叫FIFO)
#include<sys/types.h>
#include<sys/stat.h>
int mkinfo(const char *pathname, mode_t mode);//<span style="font-family: 宋体, Arial; line-height: 26px;"><span style="font-size:12px;">pathname为创建有名管道的全路径名,mode为创建有名管道的模式</span></span>
实现分析
//管道缓冲区个数
#define PIPE_BUFFERS (16)
//管道缓存区对象结构
struct pipe_buffer {
struct page *page; //管道缓冲区页框的描述符地址
unsigned int offset, len; //页框内有效数据的当前位置,和有效数据的长度
struct pipe_buf_operations *ops; //管道缓存区方法表的地址
};//管道信息结构
struct pipe_inode_info {
wait_queue_head_t wait; //管道等待队列
unsigned int nrbufs, curbuf; //包含待读数据的缓冲区数和包含待读数据的第一个缓冲区的索引
struct pipe_buffer bufs[PIPE_BUFFERS]; //管道缓冲区描述符数组
struct page *tmp_page; //高速缓存区页框指针
unsigned int start; //当前管道缓存区读的位置
unsigned int readers; //读进程的标志,或编号
unsigned int writers; //写进程的标志,或编号
unsigned int waiting_writers; //在等待队列中睡眠的写进程的个数
unsigned int r_counter; //与readers类似,但当等待写入FIFO的进程是使用
unsigned int w_counter; //与writers类似,但当等待写入FIFO的进程时使用
struct fasync_struct *fasync_readers; //用于通过信号进行的异步I/O通知
struct fasync_struct *fasync_writers; //用于通过信号的异步I/O通知
};//管道读操作函数
static ssize_t
pipe_readv(struct file *filp, const struct iovec *_iov,
unsigned long nr_segs, loff_t *ppos)
{
struct inode *inode = filp->f_dentry->d_inode; //获取inode结点指针
struct pipe_inode_info *info;
int do_wakeup;
ssize_t ret;
struct iovec *iov = (struct iovec *)_iov; //获取读缓冲区的结构
size_t total_len;
total_len = iov_length(iov, nr_segs);
/* Null read succeeds. */
if (unlikely(total_len == 0))
return 0;
do_wakeup = 0;
ret = 0;
down(PIPE_SEM(*inode)); //获取inode中的i_sem信号量
info = inode->i_pipe; //获取inode 结构的pipe_inode_info结构指针
for (;;) {
int bufs = info->nrbufs; //检查有几个管道缓冲区有被读取的数据
if (bufs) { //说明有其中有缓冲区包含了读数据
int curbuf = info->curbuf; //获取当前读数据的管道缓存区的索引
struct pipe_buffer *buf = info->bufs + curbuf; //共有16个缓冲区,curbuf是当前的
struct pipe_buf_operations *ops = buf->ops; //获取操作函数列表
void *addr;
size_t chars = buf->len;
int error;
//若缓冲区长度大于要求读取的数据长度,chars设置成要求读的长度
if (chars > total_len)
chars = total_len;
//执行Map方法
addr = ops->map(filp, info, buf);
//从缓存区中复制数据
error = pipe_iov_copy_to_user(iov, addr + buf->offset, chars);
//执行umap方法
ops->unmap(info, buf);
if (unlikely(error)) {
if (!ret) ret = -EFAULT; //第一次读失败
break;
}
//更新管道的offset和len字段
ret += chars;
buf->offset += chars;
buf->len -= chars;
//若现在的缓存区的数据长度为0
if (!buf->len) {
buf->ops = NULL;
ops->release(info, buf);
curbuf = (curbuf + 1) & (PIPE_BUFFERS-1);
info->curbuf = curbuf;
info->nrbufs = --bufs;
do_wakeup = 1;
}
total_len -= chars; //更新读的总长度
if (!total_len) //该读的已读完成
break; /* common path: read succeeded */
}
if (bufs) /* More to do? */
continue;
//若bufs为0,说明所有管道为NULL,此时进行一下操作
if (!PIPE_WRITERS(*inode)) //是否有写操作正在进行
break;
if (!PIPE_WAITING_WRITERS(*inode)) { //是否需要等待
/* syscall merging: Usually we must not sleep
* if O_NONBLOCK is set, or if we got some data.
* But if a writer sleeps in kernel space, then
* we can wait for that data without violating POSIX.
*/
if (ret)
break;
if (filp->f_flags & O_NONBLOCK) { //要等待但又设置了NONBLOCK标记,矛盾了
ret = -EAGAIN;
break;
}
}
if (signal_pending(current)) { //设置进程阻塞标志
if (!ret) ret = -ERESTARTSYS;
break;
}
if (do_wakeup) {
wake_up_interruptible_sync(PIPE_WAIT(*inode));
kill_fasync(PIPE_FASYNC_WRITERS(*inode), SIGIO, POLL_OUT);
}
pipe_wait(inode);
}
up(PIPE_SEM(*inode));
/* Signal writers asynchronously that there is more room. */
if (do_wakeup) {
wake_up_interruptible(PIPE_WAIT(*inode));
kill_fasync(PIPE_FASYNC_WRITERS(*inode), SIGIO, POLL_OUT);
}
if (ret > 0)
file_accessed(filp); //更新文件结构的atime对象
return ret;
}
static ssize_t
pipe_read(struct file *filp, char __user *buf, size_t count, loff_t *ppos)
{
struct iovec iov = { .iov_base = buf, .iov_len = count };
return pipe_readv(filp, &iov, 1, ppos);
}
/* Drop the inode semaphore and wait for a pipe event, atomically */
void pipe_wait(struct inode * inode)
{
DEFINE_WAIT(wait);
//把current添加到管道的等待队列中
prepare_to_wait(PIPE_WAIT(*inode), &wait, TASK_INTERRUPTIBLE);
//释放i_sem
up(PIPE_SEM(*inode));
schedule();
//被呼醒,把它从等待队列中删除
finish_wait(PIPE_WAIT(*inode), &wait);
//再次获取i_sem索引节点信号量
down(PIPE_SEM(*inode));
}static ssize_t
pipe_writev(struct file *filp, const struct iovec *_iov,
unsigned long nr_segs, loff_t *ppos)
{
struct inode *inode = filp->f_dentry->d_inode;
struct pipe_inode_info *info;
ssize_t ret;
int do_wakeup;
struct iovec *iov = (struct iovec *)_iov;
size_t total_len;
total_len = iov_length(iov, nr_segs);
/* Null write succeeds. */
if (unlikely(total_len == 0))
return 0;
do_wakeup = 0;
ret = 0;
down(PIPE_SEM(*inode));
info = inode->i_pipe;
//是否有读者进程存在,若没有写管道操作就没有任何意义
//此时产生SIGPIPE信号
if (!PIPE_READERS(*inode)) {
send_sig(SIGPIPE, current, 0);
ret = -EPIPE;
goto out;
}
/* We try to merge small writes */
//若有待读数据的缓冲区,而且写入的数据长度小于PAGE_SIZE
if (info->nrbufs && total_len < PAGE_SIZE) {
//第一个待读缓冲区+可读缓冲区数-1得到第一个可写缓冲区的地址
int lastbuf = (info->curbuf + info->nrbufs - 1) & (PIPE_BUFFERS-1);
struct pipe_buffer *buf = info->bufs + lastbuf;
struct pipe_buf_operations *ops = buf->ops;
int offset = buf->offset + buf->len;
//若可写缓冲区的剩余的空间大于写入的数据总量total_len
if (ops->can_merge && offset + total_len <= PAGE_SIZE) {
void *addr = ops->map(filp, info, buf);
//把数据复制到管道缓冲区
int error = pipe_iov_copy_from_user(offset + addr, iov, total_len);
ops->unmap(info, buf);
ret = error;
do_wakeup = 1;
if (error)
goto out;
//更新有效数据长度字段
buf->len += total_len;
ret = total_len;
goto out;
}
}
// 若全部可写(可读缓冲区数为0),
// 或写入数据长度大于管道缓冲区的长度单位(PAGE_SIZE)
for (;;) {
int bufs;
//是否有读者进程存在
if (!PIPE_READERS(*inode)) {
send_sig(SIGPIPE, current, 0);
if (!ret) ret = -EPIPE;
break;
}
//获取读缓冲区数
bufs = info->nrbufs;
if (bufs < PIPE_BUFFERS) {
ssize_t chars;
//用第一个可读缓冲区+可读缓冲区数得到可写(空)缓冲区的地址
int newbuf = (info->curbuf + bufs) & (PIPE_BUFFERS-1);
struct pipe_buffer *buf = info->bufs + newbuf;
struct page *page = info->tmp_page;
int error;
//若page的值为空,从伙伴系统中获取一页
if (!page) {
page = alloc_page(GFP_HIGHUSER);
if (unlikely(!page)) {
ret = ret ? : -ENOMEM;
break;
}
info->tmp_page = page;
}
/* Always wakeup, even if the copy fails. Otherwise
* we lock up (O_NONBLOCK-)readers that sleep due to
* syscall merging.
* FIXME! Is this really true?
*/
do_wakeup = 1;
chars = PAGE_SIZE;
if (chars > total_len)
chars = total_len;
//写chars字节到缓冲区中
error = pipe_iov_copy_from_user(kmap(page), iov, chars);
kunmap(page);
if (unlikely(error)) {
if (!ret) ret = -EFAULT;
break;
}
ret += chars;
/* Insert it into the buffer array */
/更新nrbufs,和len字段。
buf->page = page;
buf->ops = &anon_pipe_buf_ops;
buf->offset = 0;
buf->len = chars;
info->nrbufs = ++bufs;
info->tmp_page = NULL;
//若没有写完继续写入剩下的数据
total_len -= chars;
if (!total_len)
break;
}
//还有可写缓冲区,继续写
if (bufs < PIPE_BUFFERS)
continue;
//若设置非阻塞,
//若没有写入任何的数据ret=0,此时返回错误
//若已经写完了数据,结束写操作。
if (filp->f_flags & O_NONBLOCK) {
if (!ret) ret = -EAGAIN;
break;
}
if (signal_pending(current)) {
if (!ret) ret = -ERESTARTSYS;
break;
}
if (do_wakeup) {
wake_up_interruptible_sync(PIPE_WAIT(*inode));
kill_fasync(PIPE_FASYNC_READERS(*inode), SIGIO, POLL_IN);
do_wakeup = 0;
}
PIPE_WAITING_WRITERS(*inode)++;
pipe_wait(inode);
PIPE_WAITING_WRITERS(*inode)--;
}
out:
up(PIPE_SEM(*inode));
if (do_wakeup) {
wake_up_interruptible(PIPE_WAIT(*inode));
kill_fasync(PIPE_FASYNC_READERS(*inode), SIGIO, POLL_IN);
}
if (ret > 0)
inode_update_time(inode, 1); /* mtime and ctime */
return ret;
}PS: 管道是作为一组VFS对象来实现的,因此没有对应的磁盘映像。所以管道的安装和实现都是VFS类似,此处不进行探讨
以上是关于重新审视进程间的通信的主要内容,如果未能解决你的问题,请参考以下文章