IMU的那点事儿
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了IMU的那点事儿相关的知识,希望对你有一定的参考价值。
参考技术A 一. 对于bosch芯片的总结Offset 是指sensor的零偏。Datasheet 里边描述的是在不同的情况下offset 的spec.
OffA, INT 表示sensor 出厂时最初的offset spec, 是component level
OffA, board 表示sensor 在贴到PCB 上的offset spec, 是board level
OffA, MSL 表示sensor 在经历MSL1 precondition 的条件后再焊接到板子上的offset spec
OffA, life 表示sensor 在整个life time 内保证的offset spec, 但是如果机器结构设计不理想,导致PCB 板存在比较大的弯折,sensor offset 会受到比较大的影响,那这种情况就需要特别讨论,而不能直接参考这个spec.
二 装配
MEMS IMU芯片经过贴片,组装的工艺过程,由于受到应力的影响,导致imu芯片中微机械结构受到影响,导致电容板距离变大或变小,从而导致加速度变大或者变小,而对陀螺也会产生一定的影响,主要影响offset的变大或者变小。
数据突变根据之前的经验,有几个原因如下,
1,温度周期的骤升,比如芯片的位置附件有相关器件几秒钟工作一次,此时温度骤升,可能会引起加速度数据也发生突变。
2,周期性的振动或干扰。振动来源于设备上马达,大电感等,或者周边环境带来的振动,地铁导致的地面振动,敲击键盘,人走动,空调机等。电气干扰主要来源于电源等。
根据描述,应该是加速度的任何一个轴与地面垂直的方向,都会有这个跳变,也就是说问题跟着方向走而不是跟着某个轴走,所以初步判断和外部的干扰有关。
导致imu offset过大的情况:
1. imu芯片贴片点胶
2.imu pcb受到各种应力影响;
减少这种因素的主要举措:
1.尽量避免点胶;
2.sensor加一个屏蔽罩;
3.sensor避免处理应力对角线上,避免外壳四周压力的位置,避免螺栓周围的位置;
二. IMU算法方面
imu的数据必须经过标定,至少要将零偏等数据计算出来;
imu的零偏包括固定零偏(受到应力和其他因素的影响)和启动零偏(每次启动不一样,启动之后就固定不变);
标定一般标定的是固定零偏和部分启动零偏,算法估计的是启动零偏的残差值和温飘。
关于楼梯的那点事儿(持续更新)
众所周知,由于有了墙,所以我们需要楼梯。
楼梯一:maven for ionic2
屋顶的风景:
解决了ionic2打包(第一次build)时,下载maven2非常缓慢(甚至下载不下来而中断)的问题。
爬楼梯:
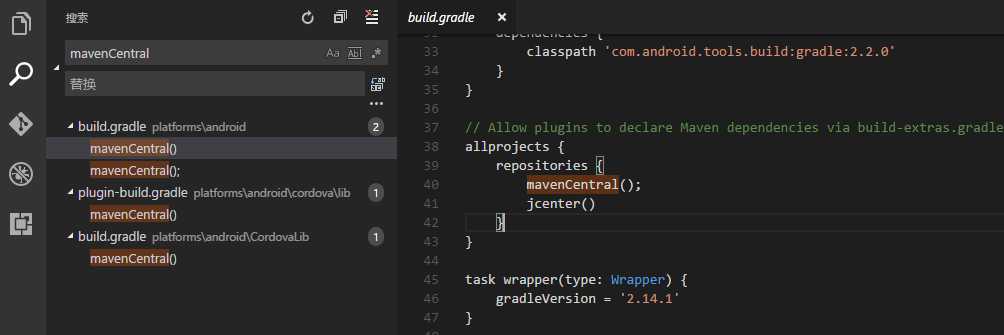
mavenCentral() 改为
maven { url "http://maven.aliyun.com/nexus/content/groups/public" }
楼梯二:npm
屋顶的风景:
当然就是解决了GFW无法下载的问题。
爬楼梯:
直接上链接吧http://npm.taobao.org/
使用方法是
npm install -g cnpm --registry=https://registry.npm.taobao.org以上是关于IMU的那点事儿的主要内容,如果未能解决你的问题,请参考以下文章