如何用一部红外遥控器来遥控操作树莓派上安装的影音中心
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了如何用一部红外遥控器来遥控操作树莓派上安装的影音中心相关的知识,希望对你有一定的参考价值。
参考技术A RM-661可以集合多个遥控器一起遥控设备手把手教你做一个相机红外遥控器
ML-L3是用于尼康部分型号相机的无线红外遥控器,可以通过红外方式来控制快门的释放,支持B门拍摄。官方售价100RMB左右,山寨版售价10RMB左右。虽然也能实现基本的遥控功能,但是功能还是比较单一,如不能实现定时拍摄,即用来拍摄制作延时视频的素材。本篇文章介绍如何通过Arduino、MCU或FPGA来控制红外发射器,产生快门指令从而实现无线遥控快门的功能。

拆解ML-L3遥控器
为了实现ML-L3遥控器的功能,我们首先要了解无线遥控器的原理。当然最好的方式就是拆解一个ML-L3,然后看看内部的电路,然后测出红外的编码。但是手头又没有这样的一个遥控器,有国外的网友已经拆解了并且测出了红外编码的波形,如下图。
官方遥控器PCB板:

山寨遥控器PCB板:

从PCB板来看,果然还是官方的用料更足一些,通过测量红外发射引脚,在按下按钮时,红外发射头会发出一串脉冲信号,如下图所示:

其中黑色的部分是38KHz的PWM方波,空白部分是低电平,以上波形就表示一个快门指令。
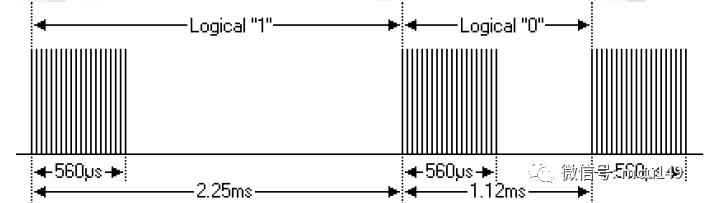
红外遥控协议主要有两种:NEC协议和Philips RC-5协议,NEC采用PWM方式调制,RC-5采用PPM方式调制。其中使用最多的是NEC协议,38KHz载波,一般是由引导码+地址码+地址反码+数据+数据反码构成。其中逻辑0和逻辑1的编码如下:
基于Arduino的实现
好了,知道了快门指令的红外波形,我们只需要写个函数实现这一串脉冲信号就可以了。Arduino开发板,我手头上有的是Circuit Playground Express这款开发板,板载一对红外发射接收头,和两路按键,对于我们的功能已经是足够用了。在使用前需要先安装Cortex-M0的库。

程序非常简单,按下按键时,发出一个快门指令:
#include<Adafruit_CircuitPlayground.h>
#define IR_Pin 25
#defineLed_Pin13
#defineButtonA_Pin4
#defineButtonB_Pin5
#define LED_ON digitalWrite(Led_Pin, LOW)
#define LED_OFF digitalWrite(Led_Pin, HIGH)
#define LED_SET(x) digitalWrite(Led_Pin, x)
#define IR_ON digitalWrite(IR_Pin, HIGH)
#define IR_OFF digitalWrite(IR_Pin, LOW)
#define GET_BUTTONA() digitalRead(ButtonA_Pin)
#define GET_BUTTONB() digitalRead(ButtonB_Pin)
int sts = 0;
void setup()
{
pinMode(IR_Pin, OUTPUT);
pinMode(Led_Pin, OUTPUT);
pinMode(ButtonA_Pin, INPUT_PULLDOWN);
pinMode(ButtonB_Pin, INPUT_PULLDOWN);
Serial.begin(9600);
}
//Nikon ML-L3 红外遥控器快门编码:38KHz=26us
void loop()
{
if(GET_BUTTONA())
{
delay(10);
if(GET_BUTTONA())
{
sts = !sts;
LED_SET(sts);
Serial.println("Right button pressed!");
OneShot();
}
}
while(GET_BUTTONA()); //等待松开
}
voidOneShot()
{
int i = 0;
for(i = 76; i > 0; i--) //2100ms
{
IR_ON; //13.5
delayMicroseconds(12);
IR_OFF; //13.7
delayMicroseconds(12);
}
IR_OFF;
delay(28); //2803us
for(i = 15; i > 0; i--) //393us
{
IR_ON;
delayMicroseconds(12);
IR_OFF;
delayMicroseconds(12);
}
IR_OFF;
delayMicroseconds(1580); //1611us
for(i = 15; i > 0; i--)
{
IR_ON;
delayMicroseconds(12);
IR_OFF;
delayMicroseconds(12);
}
delayMicroseconds(3580);
for(i = 15; i > 0; i--)
{
IR_ON;
delayMicroseconds(12);
IR_OFF;
delayMicroseconds(12);
}
IR_OFF;
}基于STM32的实现
在STM32F103上的实现也是非常简单,主要用到了GPIO控制和精确延时函数。红外控制引脚和按键引脚可根据需要来调整。
//根据Nikon ML-L3红外遥控器编码协议,产生快门指令
voidOneShot(void)
{
int i = 0;
for(i = 76; i > 0; i--) //2100ms
{
IR_ON; //13.5
delay_us(12);
IR_OFF; //13.7
delay_us(12);
}
IR_OFF;
delay_ms(28); //2803us
for(i = 15; i > 0; i--) //393us
{
IR_ON;
delay_us(12);
IR_OFF;
delay_us(12);
}
IR_OFF;
delay_us(1580); //1611us
for(i = 15; i > 0; i--)
{
IR_ON;
delay_us(12);
IR_OFF;
delay_us(12);
}
delay_us(3580);
for(i = 15; i > 0; i--)
{
IR_ON;
delay_us(12);
IR_OFF;
delay_us(12);
}
IR_OFF;
}基于FPGA的实现
对于FPGA来说,这种波形的产生,时间可以控制的更精确,这取决于FPGA的时钟,时钟越高精度越高,而且可控性更强一些,就是实现起来稍微麻烦一些。
Verilog文件
module ml_l3_pulse_gen(
input clk_50M, //20ns
input rst_n,
input trig, //negedge trig
output pulse
);
parameter T1_2000US = 100000;
parameter T2_28000US = 1400000;
parameter T3_400US = 20000;
parameter T4_1580US = 79000;
parameter T5_400US = T3_400US;
parameter T6_3580US = 179000;
parameter T7_400US = T3_400US;
parameter T1_STS = 1;
parameter T2_STS = 2;
parameter T3_STS = 3;
parameter T4_STS = 4;
parameter T5_STS = 5;
parameter T6_STS = 6;
parameter T7_STS = 7;
parameter T8_STS = 8;
parameter T0_STS = 0;
parameter TIME_38KHZ = 658;
reg [7:0] cur_sts;
reg [31:0] cnt_38khz;
reg [31:0] cnt;
reg [31:0] cnt_max;
reg en;
reg pwm_38k;
reg trig_reg;
assign pulse = (en) ? pwm_38k : 0;
always @ (posedge clk_50M)
begin
trig_reg <= trig;
end
always @ (posedge clk_50M)
begin
if(!rst_n)
cnt_max <= 0;
else
begin
case(cur_sts)
T0_STS : cnt_max <= 0;
T1_STS : cnt_max <= T1_2000US;
T2_STS : cnt_max <= T2_28000US;
T3_STS : cnt_max <= T3_400US;
T4_STS : cnt_max <= T4_1580US;
T5_STS : cnt_max <= T5_400US;
T6_STS : cnt_max <= T6_3580US;
T7_STS : cnt_max <= T7_400US;
default: cnt_max <= 0;
endcase
end
end
always @ (posedge clk_50M)
begin
if(!rst_n)
en <= 0;
else
begin
case(cur_sts)
1,3,5,7: en <= 1;
2,4,6,0: en <= 0;
default: en <= 0;
endcase
end
end
always @ (posedge clk_50M)
begin
if(!rst_n)
cnt <= 0;
else
begin
if(cur_sts != T0_STS && cnt < cnt_max)
cnt <= cnt + 1;
else
cnt <= 0;
end
end
always @ (posedge clk_50M)
begin
if(!rst_n)
cur_sts <= T0_STS;
else
begin
case(cur_sts)
T0_STS:
if(trig_reg & !trig)
cur_sts <= T1_STS;
T1_STS:
if(cnt == T1_2000US)
cur_sts <= T2_STS;
T2_STS:
if(cnt == T2_28000US)
cur_sts <= T3_STS;
T3_STS:
if(cnt == T3_400US)
cur_sts <= T4_STS;
T4_STS:
if(cnt == T4_1580US)
cur_sts <= T5_STS;
T5_STS:
if(cnt == T5_400US)
cur_sts <= T6_STS;
T6_STS:
if(cnt == T6_3580US)
cur_sts <= T7_STS;
T7_STS:
if(cnt == T7_400US)
cur_sts <= T0_STS;
default:
cur_sts <= T0_STS;
endcase
end
end
/* 38KHz counter */
always @ (posedge clk_50M)
begin
if(!rst_n)
cnt_38khz <= 0;
else
begin
if(en && cnt_38khz < TIME_38KHZ)
cnt_38khz <= cnt_38khz + 1;
else
cnt_38khz <= 0;
end
end
/* generate 38KHz pwm */
always @ (posedge clk_50M)
begin
if(!rst_n)
pwm_38k <= 0;
elseif(cnt_38khz == TIME_38KHZ)
pwm_38k <= ~pwm_38k;
end
endmodule仿真test bench 文件
`timescale 1ns/100ps
module ml_l3_pulse_gen_tb;
parameter SYSCLK_PERIOD = 20;// 50MHZ
reg SYSCLK;
reg NSYSRESET;
reg trig;
wire pulse;
initial
begin
SYSCLK = 1'b0;
NSYSRESET = 1'b0;
trig = 0;
end
initial
begin
#(SYSCLK_PERIOD * 10 )
NSYSRESET = 1'b0;
trig = 0;
#(SYSCLK_PERIOD * 1000 )
NSYSRESET = 1'b1;
#(SYSCLK_PERIOD * 10 )
trig = 1;
#SYSCLK_PERIOD
trig = 0;
end
always @(SYSCLK)
#(SYSCLK_PERIOD / 2.0) SYSCLK <= !SYSCLK;
ml_l3_pulse_gen ml_l3_pulse_gen_0 (
// Inputs
.clk_50M(SYSCLK),
.rst_n(NSYSRESET),
.trig(trig),
// Outputs
.pulse(pulse)
);
endmodule实际使用效果
对于实际的脉冲时间,不用特别的精确,误差不要太大就行,最好使用示波器测量以下脉冲的时间。对于制作好的遥控器,只需要在相机周围按下按钮就可实现遥控快门。相机机身的红外接收头前后各有一个,可以方便在不同的位置遥控。如下图所示。

总结
这款尼康ML-L3红外遥控器的实现原理非常简单,可扩展性强,可以根据需要自己添加功能,如添加固定时间间隔拍摄,固定张数拍摄,用于拍摄制作延时视频所需要的图片素材。当然,也可以使用手机上的遥控器来实现这个功能。
代码获取
以上代码已经开源在Github和Gitee平台,地址如下。
Github开源地址:
https://github.com/whik/nikon-wireless-remote-control-ML-L3-DIY.git
Gitee开源地址 :
https://gitee.com/whik/nikon-wireless-remote-control-ML-L3-DIY.git
没有使用代码托管平台的朋友,可以在公众号后台回复【尼康遥控器】也可以获取代码。
参考资料
文中的ML-L3拆解图,Arduino代码参考自以下链接内容。
http://www.bigmike.it/ircontrol/
https://www.sbprojects.net/projects/nikon/index.php
https://learn.adafruit.com/ir-sensor/making-an-intervalometer
以上是关于如何用一部红外遥控器来遥控操作树莓派上安装的影音中心的主要内容,如果未能解决你的问题,请参考以下文章