Linux下编写ENC28J60网卡驱动,完善网络设备框架
Posted DS小龙哥
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Linux下编写ENC28J60网卡驱动,完善网络设备框架相关的知识,希望对你有一定的参考价值。
一、框架模型
linux下设备驱动都有一套标准的结构,字符设备,块设备,网络设备都是自己的一套框架。编写驱动只需要把内核的框架搞清楚,然后照着结构填入参数,注册进内核,在应用层就可以按照标准的形式调用了。 对于网络设备而言,主要目的就是网络数据的收发,编写驱动时将linux网络设备驱动里的接口与实际网卡硬件的操作接口对应上,应用层就可以操作网卡完成网络通信了。底层驱动里编写网卡驱动与单片机一样。
这是网络设备驱动注册的一些函数:
动态分配空间
#define alloc_etherdev(sizeof_priv) alloc_etherdev_mq(sizeof_priv, 1)
函数参数:分配的空间大小。如果自己没有定义自己的结构体,就直接填 sizeof(struct net_device)
函数返回值:执行成功返回申请的空间地址。
空间分配的函数还有一个 alloc_netdev()函数。
alloc_etherdev()是 alloc_netdev()针对以太网的"快捷"函数
注册网络设备
int register_netdev(struct net_device *dev)
函数形参:网络设备信息 struct net_device
函数返回值:执行成功返回 0。
注册网络设备示例
static struct net_device_ops netdev_ops_test= //网络设备虚拟文件操作集合
.ndo_open = test_ndo_open,
.ndo_stop = test_ndo_stop,
.ndo_start_xmit = ndo_start_xmit,
;
net = alloc_etherdev(sizeof(*net));
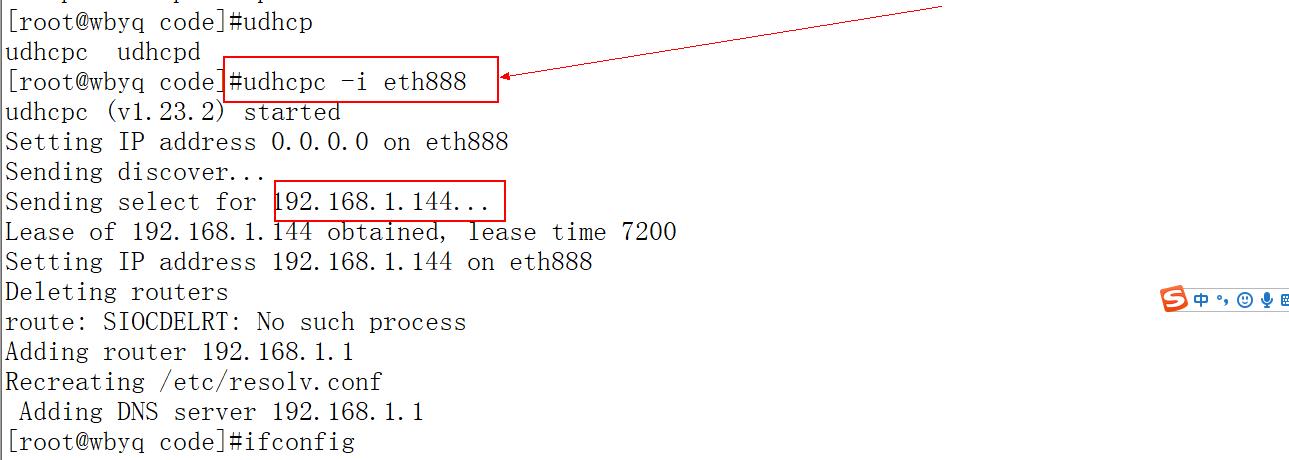
//网络设备的名称,使用 ifconfig -a 可以查看到。
strcpy(net->name, "eth888");
net->netdev_ops=&netdev_ops_test; //虚拟文件操作集合
注销网络设备
void unregister_netdev(struct net_device *dev)
功能:注销网络设备
参数:注销的网络设备结构体当前用来测试的网卡选用ENC28J60 ,这是带有行业标准串行外设接口(Serial Peripheral Interface,SPI)的独立以太网 控制器。
可作为任何配备有 SPI 的控制器的以太网接口。ENC28J60 符合 IEEE 802.3 的全部规范,采用了一系列包过滤机制以对传入数据包进行限制。 它还提供了一个内部 DMA 模块, 以实现快速数据吞吐和硬件支持的 IP 校验和计算。 与主控制器的通信通过两个中断引脚和 SPI 实现,数据传输速率高达 10 Mb/s。两个专用的引脚用
于连接 LED,进行网络活动状态指示。

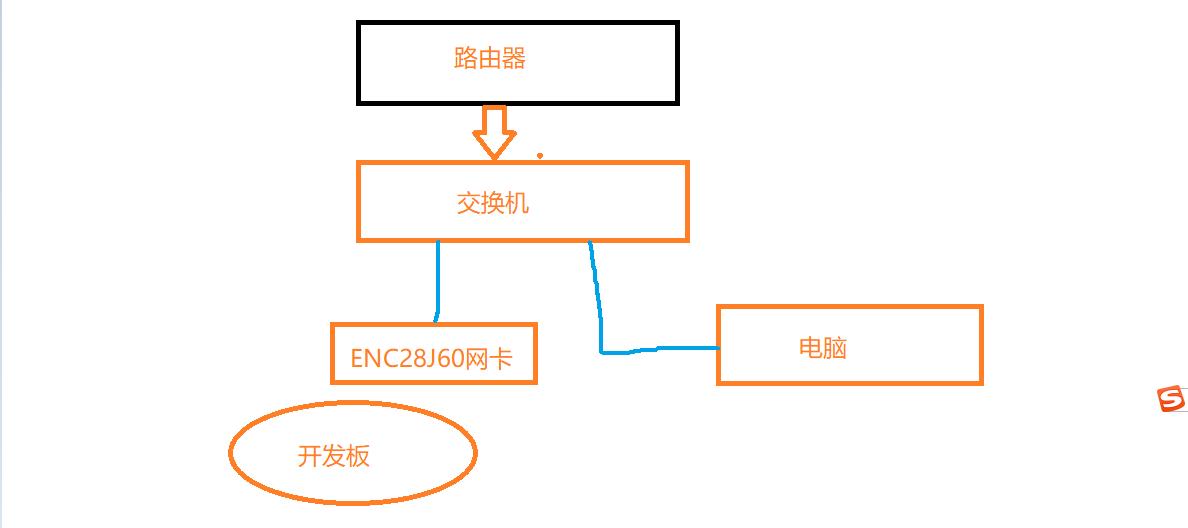
与开发板的硬件连接:

二、驱动代码
2.1 ENC28J60网卡驱动+网络设备框架+中断接收数据.c
#include <linux/init.h>
#include <linux/module.h>
#include <linux/netdevice.h>
#include <linux/etherdevice.h>
#include <linux/delay.h>
#include "enc28j60.h"
#include <linux/gpio.h>
#include <mach/gpio.h>
#include <plat/gpio-cfg.h>
#include <linux/delay.h>
#include <linux/workqueue.h>
#include <linux/delay.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/timer.h>
/*
以下是ENC28J60驱动移植接口:
SPI0接口:
GPB_0--SCK
GPB_1--CS
GPB_2--MISO
GPB_3--MOSI
GPB(4)--复位
GPX3(2)--中断
*/
static u32 ENC28J60_IRQ; //中断编号
/*SPI底层硬件IO定义*/
#define Tiny4412_GPIO_SPI_SCK EXYNOS4_GPB(0)
#define Tiny4412_GPIO_SPI_CS EXYNOS4_GPB(1)
#define Tiny4412_GPIO_SPI_MISO EXYNOS4_GPB(2)
#define Tiny4412_GPIO_SPI_MOSI EXYNOS4_GPB(3)
#define ENC28J60_GPIO_REST EXYNOS4_GPB(4)
#define ENC28J60_IRQ_NUMBER EXYNOS4_GPX3(2)
#define ENC28J60_CS(x) if(x)gpio_set_value(Tiny4412_GPIO_SPI_CS,1);elsegpio_set_value(Tiny4412_GPIO_SPI_CS,0); //ENC28J60片选信号
#define ENC28J60_RST(x) if(x)gpio_set_value(ENC28J60_GPIO_REST,1);elsegpio_set_value(ENC28J60_GPIO_REST,0); //ENC28J60复位信号
#define ENC28J60_MOSI(x) if(x)gpio_set_value(Tiny4412_GPIO_SPI_MOSI,1);elsegpio_set_value(Tiny4412_GPIO_SPI_MOSI,0); //输出
#define ENC28J60_MISO (gpio_get_value(Tiny4412_GPIO_SPI_MISO)) //输入
#define ENC28J60_SCLK(x) if(x)gpio_set_value(Tiny4412_GPIO_SPI_SCK,1);elsegpio_set_value(Tiny4412_GPIO_SPI_SCK,0); //时钟线
static u8 ENC28J60BANK;
static u32 NextPacketPtr;
static struct timer_list timer_date;
//网卡MAC地址,必须唯一
u8 ENC28J60_MacAddr[6]=0x04,0x02,0x35,0x00,0x00,0x01; //MAC地址
static struct net_device *tiny4412_net=NULL; //网络设备指针结构
/*
函数功能:底层SPI接口收发一个字节
说 明:模拟SPI时序,ENC28J60时钟线空闲电平为低电平,在第一个下降沿采集数据
*/
u8 ENC28J60_SPI_ReadWriteOneByte(u8 tx_data)
u8 rx_data=0;
u8 i;
for(i=0;i<8;i++)
if(tx_data&0x80)ENC28J60_MOSI(1);
else ENC28J60_MOSI(0);
tx_data<<=1;
ENC28J60_SCLK(1);
rx_data<<=1;
if(ENC28J60_MISO)rx_data|=0x01;
ENC28J60_SCLK(0);//第一个下降沿采集数据
return rx_data;
/*
函数功能:复位ENC28J60,包括SPI初始化/IO初始化等
MISO--->PA6----主机输入
MOSI--->PA7----主机输出
SCLK--->PA5----时钟信号
CS----->PA4----片选
RESET-->PG15---复位
*/
void ENC28J60_Reset(void)
/*释放GPIO*/
gpio_free(Tiny4412_GPIO_SPI_SCK);
gpio_free(Tiny4412_GPIO_SPI_CS);
gpio_free(Tiny4412_GPIO_SPI_MISO);
gpio_free(Tiny4412_GPIO_SPI_MOSI);
gpio_free(ENC28J60_GPIO_REST);
/*1. 配置GPIO模式*/
printk("%d\\n",gpio_request(Tiny4412_GPIO_SPI_SCK, "Tiny4412_Tiny4412_SPI_SCK"));
printk("%d\\n",gpio_request(Tiny4412_GPIO_SPI_CS, "Tiny4412_Tiny4412_SPI_CS"));
printk("%d\\n",gpio_request(Tiny4412_GPIO_SPI_MISO, "Tiny4412_Tiny4412_SPI_MISO"));
printk("%d\\n",gpio_request(Tiny4412_GPIO_SPI_MOSI, "Tiny4412_Tiny4412_SPI_MOSI"));
printk("%d\\n",gpio_request(ENC28J60_GPIO_REST, "Tiny4412_Tiny4412_SPI_REST"));
printk("%d\\n",s3c_gpio_cfgpin(Tiny4412_GPIO_SPI_SCK, S3C_GPIO_OUTPUT));
printk("%d\\n",s3c_gpio_cfgpin(Tiny4412_GPIO_SPI_CS, S3C_GPIO_OUTPUT));
printk("%d\\n",s3c_gpio_cfgpin(Tiny4412_GPIO_SPI_MISO, S3C_GPIO_INPUT));
printk("%d\\n",s3c_gpio_cfgpin(Tiny4412_GPIO_SPI_MOSI, S3C_GPIO_OUTPUT));
printk("%d\\n",s3c_gpio_cfgpin(ENC28J60_GPIO_REST, S3C_GPIO_OUTPUT));
ENC28J60_RST(0); //复位ENC28J60
mdelay(10);
ENC28J60_RST(1); //复位结束
mdelay(10);
/*
函数功能:读取ENC28J60寄存器(带操作码)
参 数:
op:操作码
addr:寄存器地址/参数
返 回 值:读到的数据
*/
u8 ENC28J60_Read_Op(u8 op,u8 addr)
u8 dat=0;
ENC28J60_CS(0);
dat=op|(addr&ADDR_MASK);
ENC28J60_SPI_ReadWriteOneByte(dat);
dat=ENC28J60_SPI_ReadWriteOneByte(0xFF);
//如果是读取MAC/MII寄存器,则第二次读到的数据才是正确的,见手册29页
if(addr&0x80)dat=ENC28J60_SPI_ReadWriteOneByte(0xFF);
ENC28J60_CS(1);
return dat;
/*
函数功能:读取ENC28J60寄存器(带操作码)
参 数:
op:操作码
addr:寄存器地址
data:参数
*/
void ENC28J60_Write_Op(u8 op,u8 addr,u8 data)
u8 dat = 0;
ENC28J60_CS(0);
dat=op|(addr&ADDR_MASK);
ENC28J60_SPI_ReadWriteOneByte(dat);
ENC28J60_SPI_ReadWriteOneByte(data);
ENC28J60_CS(1);
/*
函数功能:读取ENC28J60接收缓存数据
参 数:
len:要读取的数据长度
data:输出数据缓存区(末尾自动添加结束符)
*/
void ENC28J60_Read_Buf(u32 len,u8* data)
ENC28J60_CS(0);
ENC28J60_SPI_ReadWriteOneByte(ENC28J60_READ_BUF_MEM);
while(len)
len--;
*data=(u8)ENC28J60_SPI_ReadWriteOneByte(0);
data++;
*data='\\0';
ENC28J60_CS(1);
/*
函数功能:向ENC28J60写发送缓存数据
参 数:
len:要写入的数据长度
data:数据缓存区
*/
void ENC28J60_Write_Buf(u32 len,u8* data)
ENC28J60_CS(0);
ENC28J60_SPI_ReadWriteOneByte(ENC28J60_WRITE_BUF_MEM);
while(len)
len--;
ENC28J60_SPI_ReadWriteOneByte(*data);
data++;
ENC28J60_CS(1);
/*
函数功能:设置ENC28J60寄存器Bank
参 数:
ban:要设置的bank
*/
void ENC28J60_Set_Bank(u8 bank)
if((bank&BANK_MASK)!=ENC28J60BANK)//和当前bank不一致的时候,才设置
ENC28J60_Write_Op(ENC28J60_BIT_FIELD_CLR,ECON1,(ECON1_BSEL1|ECON1_BSEL0));
ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,ECON1,(bank&BANK_MASK)>>5);
ENC28J60BANK=(bank&BANK_MASK);
/*
函数功能:读取ENC28J60指定寄存器
参 数:addr:寄存器地址
返 回 值:读到的数据
*/
u8 ENC28J60_Read(u8 addr)
ENC28J60_Set_Bank(addr);//设置BANK
return ENC28J60_Read_Op(ENC28J60_READ_CTRL_REG,addr);
/*
函数功能:向ENC28J60指定寄存器写数据
参 数:
addr:寄存器地址
data:要写入的数据
*/
void ENC28J60_Write(u8 addr,u8 data)
ENC28J60_Set_Bank(addr);
ENC28J60_Write_Op(ENC28J60_WRITE_CTRL_REG,addr,data);
/*
函数功能:向ENC28J60的PHY寄存器写入数据
参 数:
addr:寄存器地址
data:要写入的数据
*/
void ENC28J60_PHY_Write(u8 addr,u32 data)
u16 retry=0;
ENC28J60_Write(MIREGADR,addr); //设置PHY寄存器地址
ENC28J60_Write(MIWRL,data); //写入数据
ENC28J60_Write(MIWRH,data>>8);
while((ENC28J60_Read(MISTAT)&MISTAT_BUSY)&&retry<0XFFF)retry++;//等待写入PHY结束
/*
函数功能:初始化ENC28J60
参 数:macaddr:MAC地址
返 回 值:
0,初始化成功;
1,初始化失败;
*/
u8 ENC28J60_Init(u8* macaddr)
u16 retry=0;
ENC28J60_Reset(); //复位底层引脚接口
ENC28J60_Write_Op(ENC28J60_SOFT_RESET,0,ENC28J60_SOFT_RESET);//软件复位
while(!(ENC28J60_Read(ESTAT)&ESTAT_CLKRDY)&&retry<500)//等待时钟稳定
retry++;
mdelay(1);
;
if(retry>=500)return 1;//ENC28J60初始化失败
// do bank 0 stuff
// initialize receive buffer
// 16-bit transfers,must write low byte first
// set receive buffer start address 设置接收缓冲区地址 8K字节容量
NextPacketPtr=RXSTART_INIT;
// Rx start
//接收缓冲器由一个硬件管理的循环FIFO 缓冲器构成。
//寄存器对ERXSTH:ERXSTL 和ERXNDH:ERXNDL 作
//为指针,定义缓冲器的容量和其在存储器中的位置。
//ERXST和ERXND指向的字节均包含在FIFO缓冲器内。
//当从以太网接口接收数据字节时,这些字节被顺序写入
//接收缓冲器。 但是当写入由ERXND 指向的存储单元
//后,硬件会自动将接收的下一字节写入由ERXST 指向
//的存储单元。 因此接收硬件将不会写入FIFO 以外的单
//元。
//设置接收起始字节
ENC28J60_Write(ERXSTL,RXSTART_INIT&0xFF);
ENC28J60_Write(ERXSTH,RXSTART_INIT>>8);
//ERXWRPTH:ERXWRPTL 寄存器定义硬件向FIFO 中
//的哪个位置写入其接收到的字节。 指针是只读的,在成
//功接收到一个数据包后,硬件会自动更新指针。 指针可
//用于判断FIFO 内剩余空间的大小 8K-1500。
//设置接收读指针字节
ENC28J60_Write(ERXRDPTL,RXSTART_INIT&0xFF);
ENC28J60_Write(ERXRDPTH,RXSTART_INIT>>8);
//设置接收结束字节
ENC28J60_Write(ERXNDL,RXSTOP_INIT&0xFF);
ENC28J60_Write(ERXNDH,RXSTOP_INIT>>8);
//设置发送起始字节
ENC28J60_Write(ETXSTL,TXSTART_INIT&0xFF);
ENC28J60_Write(ETXSTH,TXSTART_INIT>>8);
//设置发送结束字节
ENC28J60_Write(ETXNDL,TXSTOP_INIT&0xFF);
ENC28J60_Write(ETXNDH,TXSTOP_INIT>>8);
// do bank 1 stuff,packet filter:
// For broadcast packets we allow only ARP packtets
// All other packets should be unicast only for our mac (MAADR)
//
// The pattern to match on is therefore
// Type ETH.DST
// ARP BROADCAST
// 06 08 -- ff ff ff ff ff ff -> ip checksum for theses bytes=f7f9
// in binary these poitions are:11 0000 0011 1111
// This is hex 303F->EPMM0=0x3f,EPMM1=0x30
//接收过滤器
//UCEN:单播过滤器使能位
//当ANDOR = 1 时://1 = 目标地址与本地MAC 地址不匹配的数据包将被丢弃
//0 = 禁止过滤器
//当ANDOR = 0 时://1 = 目标地址与本地MAC 地址匹配的数据包会被接受
//0 = 禁止过滤器
//CRCEN:后过滤器CRC 校验使能位//1 = 所有CRC 无效的数据包都将被丢弃
//0 = 不考虑CRC 是否有效
//PMEN:格式匹配过滤器使能位
//当ANDOR = 1 时: //1 = 数据包必须符合格式匹配条件,否则将被丢弃
//0 = 禁止过滤器
//当ANDOR = 0 时: //1 = 符合格式匹配条件的数据包将被接受
//0 = 禁止过滤器
ENC28J60_Write(ERXFCON,ERXFCON_UCEN|ERXFCON_CRCEN|ERXFCON_PMEN);
ENC28J60_Write(EPMM0,0x3f);
ENC28J60_Write(EPMM1,0x30);
ENC28J60_Write(EPMCSL,0xf9);
ENC28J60_Write(EPMCSH,0xf7);
// do bank 2 stuff
// enable MAC receive
//bit 0 MARXEN:MAC 接收使能位 //1 = 允许MAC 接收数据包
//0 = 禁止数据包接收
//bit 3 TXPAUS:暂停控制帧发送使能位 //1 = 允许MAC 发送暂停控制帧(用于全双工模式下的流量控制)
//0 = 禁止暂停帧发送
//bit 2 RXPAUS:暂停控制帧接收使能位 //1 = 当接收到暂停控制帧时,禁止发送(正常操作)
//0 = 忽略接收到的暂停控制帧
ENC28J60_Write(MACON1,MACON1_MARXEN|MACON1_TXPAUS|MACON1_RXPAUS);
// bring MAC out of reset
//将MACON2 中的MARST 位清零,使MAC 退出复位状态。
ENC28J60_Write(MACON2,0x00);
// enable automatic padding to 60bytes and CRC operations
//bit 7-5 PADCFG2:PACDFG0:自动填充和CRC 配置位
//111 = 用0 填充所有短帧至64 字节长,并追加一个有效的CRC
//110 = 不自动填充短帧
//101 = MAC 自动检测具有8100h 类型字段的VLAN 协议帧,并自动填充到64 字节长。如果不
//是VLAN 帧,则填充至60 字节长。填充后还要追加一个有效的CRC
//100 = 不自动填充短帧
//011 = 用0 填充所有短帧至64 字节长,并追加一个有效的CRC
//010 = 不自动填充短帧
//001 = 用0 填充所有短帧至60 字节长,并追加一个有效的CRC
//000 = 不自动填充短帧
//bit 4 TXCRCEN:发送CRC 使能位 //1= 不管PADCFG如何,MAC都会在发送帧的末尾追加一个有效的CRC。 如果PADCFG规定要
//追加有效的CRC,则必须将TXCRCEN 置1。
//0 = MAC不会追加CRC。 检查最后4 个字节,如果不是有效的CRC 则报告给发送状态向量。
//bit 0 FULDPX:MAC 全双工使能位 //1 = MAC工作在全双工模式下。 PHCON1.PDPXMD 位必须置1。
//0 = MAC工作在半双工模式下。 PHCON1.PDPXMD 位必须清零。
ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,MACON3,MACON3_PADCFG0|MACON3_TXCRCEN|MACON3_FRMLNEN|MACON3_FULDPX);
// set inter-frame gap (non-back-to-back)
//配置非背对背包间间隔寄存器的低字节
//MAIPGL。 大多数应用使用12h 编程该寄存器。
//如果使用半双工模式,应编程非背对背包间间隔
//寄存器的高字节MAIPGH。 大多数应用使用0Ch
//编程该寄存器。
ENC28J60_Write(MAIPGL,0x12);
ENC28J60_Write(MAIPGH,0x0C);
// set inter-frame gap (back-to-back)
//配置背对背包间间隔寄存器MABBIPG。当使用
//全双工模式时,大多数应用使用15h 编程该寄存
//器,而使用半双工模式时则使用12h 进行编程。
ENC28J60_Write(MABBIPG,0x15);
// Set the maximum packet size which the controller will accept
// Do not send packets longer than MAX_FRAMELEN:
// 最大帧长度 1500
ENC28J60_Write(MAMXFLL,MAX_FRAMELEN&0xFF);
ENC28J60_Write(MAMXFLH,MAX_FRAMELEN>>8);
// do bank 3 stuff
// write MAC address
// NOTE: MAC address in ENC28J60 is byte-backward
//设置MAC地址
ENC28J60_Write(MAADR5,macaddr[0]);
ENC28J60_Write(MAADR4,macaddr[1]);
ENC28J60_Write(MAADR3,macaddr[2]);
ENC28J60_Write(MAADR2,macaddr[3]);
ENC28J60_Write(MAADR1,macaddr[4]);
ENC28J60_Write(MAADR0,macaddr[5]);
//配置PHY为全双工 LEDB为拉电流
ENC28J60_PHY_Write(PHCON1,PHCON1_PDPXMD);
// no loopback of transmitted frames 禁止环回
//HDLDIS:PHY 半双工环回禁止位
//当PHCON1.PDPXMD = 1 或PHCON1.PLOOPBK = 1 时:
//此位可被忽略。
//当PHCON1.PDPXMD = 0 且PHCON1.PLOOPBK = 0 时: //1 = 要发送的数据仅通过双绞线接口发出
//0 = 要发送的数据会环回到MAC 并通过双绞线接口发出
ENC28J60_PHY_Write(PHCON2,PHCON2_HDLDIS);
// switch to bank 0
//ECON1 寄存器
//寄存器3-1 所示为ECON1 寄存器,它用于控制
//ENC28J60 的主要功能。 ECON1 中包含接收使能、发
//送请求、DMA 控制和存储区选择位。
ENC28J60_Set_Bank(ECON1);
// enable interrutps
//EIE: 以太网中断允许寄存器
//bit 7 INTIE: 全局INT 中断允许位 //1 = 允许中断事件驱动INT 引脚
//0 = 禁止所有INT 引脚的活动(引脚始终被驱动为高电平)
//bit 6 PKTIE: 接收数据包待处理中断允许位 //1 = 允许接收数据包待处理中断
//0 = 禁止接收数据包待处理中断
ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,EIE,EIE_INTIE|EIE_PKTIE);
// enable packet reception
//bit 2 RXEN:接收使能位 //1 = 通过当前过滤器的数据包将被写入接收缓冲器
//0 = 忽略所有接收的数据包
ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,ECON1,ECON1_RXEN);
if(ENC28J60_Read(MAADR5)== macaddr[0])return 0;//初始化成功
else return 1;
/*
函数功能:读取EREVID
*/
u8 ENC28J60_Get_EREVID(void)
//在EREVID 内也存储了版本信息。 EREVID 是一个只读控
//制寄存器,包含一个5 位标识符,用来标识器件特定硅片
//的版本号
return ENC28J60_Read(EREVID);
/*
函数功能:通过ENC28J60发送数据包到网络
参 数:
len :数据包大小
packet:数据包
*/
void ENC28J60_Packet_Send(u32 len,u8* packet)
//设置发送缓冲区地址写指针入口
ENC28J60_Write(EWRPTL,TXSTART_INIT&0xFF);
ENC28J60_Write(EWRPTH,TXSTART_INIT>>8);
//设置TXND指针,以对应给定的数据包大小
ENC28J60_Write(ETXNDL,(TXSTART_INIT+len)&0xFF);
ENC28J60_Write(ETXNDH,(TXSTART_INIT+len)>>8);
//写每包控制字节(0x00表示使用macon3的设置)
ENC28J60_Write_Op(ENC28J60_WRITE_BUF_MEM,0,0x00);
//复制数据包到发送缓冲区
//printf("len:%d\\r\\n",len); //监视发送数据长度
ENC28J60_Write_Buf(len,packet);
//发送数据到网络
ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,ECON1,ECON1_TXRTS);
//复位发送逻辑的问题。参见Rev. B4 Silicon Errata point 12.
if((ENC28J60_Read(EIR)&EIR_TXERIF))ENC28J60_Write_Op(ENC28J60_BIT_FIELD_CLR,ECON1,ECON1_TXRTS);
/*
函数功能:从网络获取一个数据包内容
函数参数:
maxlen:数据包最大允许接收长度
packet:数据包缓存区
返 回 值:收到的数据包长度(字节)
*/
u32 ENC28J60_Packet_Receive(u32 maxlen,u8* packet)
u32 rxstat;
u32 len;
if(ENC28J60_Read(EPKTCNT)==0)return 0; //是否收到数据包?
//设置接收缓冲器读指针
ENC28J60_Write(ERDPTL,(NextPacketPtr));
ENC28J60_Write(ERDPTH,(NextPacketPtr)>>8);
// 读下一个包的指针
NextPacketPtr=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0);
NextPacketPtr|=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0)<<8;
//读包的长度
len=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0);
len|=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0)<<8;
len-=4; //去掉CRC计数
//读取接收状态
rxstat=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0);
rxstat|=ENC28J60_Read_Op(ENC28J60_READ_BUF_MEM,0)<<8;
//限制接收长度
if (len>maxlen-1)len=maxlen-1;
//检查CRC和符号错误
// ERXFCON.CRCEN为默认设置,一般我们不需要检查.
if((rxstat&0x80)==0)len=0;//无效
else ENC28J60_Read_Buf(len,packet);//从接收缓冲器中复制数据包
//RX读指针移动到下一个接收到的数据包的开始位置
//并释放我们刚才读出过的内存
ENC28J60_Write(ERXRDPTL,(NextPacketPtr));
ENC28J60_Write(ERXRDPTH,(NextPacketPtr)>>8);
//递减数据包计数器标志我们已经得到了这个包
ENC28J60_Write_Op(ENC28J60_BIT_FIELD_SET,ECON2,ECON2_PKTDEC);
return(len);
/*--------------------------工作队列、定时器、中断服务函数---------------------------------------*/
static struct work_struct work_list;
/*
工作队列处理函数
以下函数用于读取网卡里的数据。
读取完毕之后,再通过netif_rx()函数上报到应用层
*/
u8 Enc28j60_Rx_Buff[1518];
static void workqueue_function(struct work_struct *work)
int length;
length=ENC28J60_Packet_Receive(1518,Enc28j60_Rx_Buff); //接收ENC28J60的数据
if(length<=0)
return;
/*2. 分配新的套接字缓冲区*/
struct sk_buff *skb = dev_alloc_skb(length+NET_IP_ALIGN);
skb_reserve(skb, NET_IP_ALIGN); //对齐
skb->dev = tiny4412_net;
/* 读取硬件上接收到的数据 */
// skb_put(skb, length)//存放网卡里读取数据的缓冲区地址
memcpy(skb_put(skb, length),Enc28j60_Rx_Buff,length);
/* 获取上层协议类型 */
skb->protocol = eth_type_trans(skb,tiny4412_net);
/* 把数据包交给上层 */
netif_rx(skb);
/* 记录接收时间戳 */
tiny4412_net->last_rx = jiffies;
//printk("工作队列处理函数调用成功!\\n");
/*
函数功能: 中断服务函数
*/
irqreturn_t ENC28J60_irq_handler(int irq, void *dev)
/*共享工作队列调度*/
//printk("进入到中断服务函数!\\n");
/*使用的ENC28J60网卡中断不好使,程序就使用定时器轮询接收了*/
schedule_work(&work_list);
return IRQ_HANDLED;
static void timer_function(unsigned long data)
/*共享工作队列调度*/
schedule_work(&work_list);
/*修改定时器超时*/
mod_timer(&timer_date,jiffies+usecs_to_jiffies(100));
/*----------------------------网络设备相关代码--------------------------------------*/
/*1. 设备初始化调用,该函数在注册成功后会调用一次,可以编写网卡初始化相关代码*/
static int tiny4412_ndo_init(struct net_device * dev)
/*1. ENC28J60网卡初始化*/
u8 stat=ENC28J60_Init(ENC28J60_MacAddr);
if(stat)
printk("ENC28J60网卡初始化失败!\\r\\n");
/*2. 获取中断编号*/
ENC28J60_IRQ=gpio_to_irq(ENC28J60_IRQ_NUMBER);
printk("ENC28J60_IRQ=%d\\n",ENC28J60_IRQ);
/*3. 初始化工作队列*/
INIT_WORK(&work_list,workqueue_function);
/*4. 注册中断*/
if(request_irq(ENC28J60_IRQ,ENC28J60_irq_handler,IRQ_TYPE_EDGE_FALLING,"ENC28J60_NET",NULL)!=0)
printk("ENC28J60中断注册失败!\\n");
/*使用定时器100ms*/
timer_date.expires=jiffies+usecs_to_jiffies(100);
timer_date.function=timer_function;
/*5. 初始化定时器*/
init_timer(&timer_date);
/*6. 添加定时器到内核并启动*/
add_timer(&timer_date);
printk("网络设备初始化!\\n");
return 0;
/*2. 打开网络接口,对应ifconfig up命令,编写网络设备硬件初始化的相关代码*/
static int tiny4412_ndo_open(struct net_device *dev)
printk("网络设备打开成功!\\n");
return 0;
/*3. 关闭网络设备,对应ifconfig down命令,实现的内容与OPEN相反*/
static int tiny4412_ndo_stop(struct net_device *dev)
printk("网络设备关闭成功!\\n");
return 0;
/*4. 启动网络数据包传输的方法*/
static netdev_tx_t tiny4412_ndo_start_xmit(struct sk_buff *skb,struct net_device *dev)
int len;
char *data, shortpkt[ETH_ZLEN];
/* 获得有效数据指针和长度 */
data = skb->data;
len = skb->len;
if(len < ETH_ZLEN)
/* 如果帧长小于以太网帧最小长度,补0 */
memset(shortpkt,0,ETH_ZLEN);
memcpy(shortpkt,skb->data,skb->len);
len = ETH_ZLEN;
data = shortpkt;
dev->trans_start = jiffies; //记录发送时间戳
/* 设置硬件寄存器让硬件将数据发出去 */
ENC28J60_Packet_Send(len,data);
return NETDEV_TX_OK; //这是个枚举状态。
/*5. 设置MAC地址,对应的命令: ifconfig eth888 hw ether 00:AA:BB:CC:DD:EE */
static int tiny4412_set_mac_address(struct net_device *dev, void *addr)
struct sockaddr *address = addr;
memcpy(dev->dev_addr, address->sa_data, dev->addr_len);
printk("修改的MAC地址如下:\\n");
printk("%X-%X-%X-%X-%X-%X\\n",
tiny4412_net->dev_addr[0],
tiny4412_net->dev_addr[1],
tiny4412_net->dev_addr[2],
tiny4412_net->dev_addr[3],
tiny4412_net->dev_addr[4],
tiny4412_net->dev_addr[5]);
//设置MAC地址
ENC28J60_Write(MAADR5,tiny4412_net->dev_addr[0]);
ENC28J60_Write(MAADR4,tiny4412_net->dev_addr[1]);
ENC28J60_Write(MAADR3,tiny4412_net->dev_addr[2]);
ENC28J60_Write(MAADR2,tiny4412_net->dev_addr[3]);
ENC28J60_Write(MAADR1,tiny4412_net->dev_addr[4]);
ENC28J60_Write(MAADR0,tiny4412_net->dev_addr[5]);
return 0;
/*网络设备虚拟文件操作集合*/
static struct net_device_ops netdev_ops_test=
.ndo_open = tiny4412_ndo_open,
.ndo_stop = tiny4412_ndo_stop,
.ndo_start_xmit = tiny4412_ndo_start_xmit,
.ndo_init = tiny4412_ndo_init,
.ndo_set_mac_address= tiny4412_set_mac_address,
;
/*--------------------------驱动框架------------------------------------*/
static int __init Net_test_init(void)
/*1. 分配及初始化net_device对象,参数:私有数据大小(单位:字节数)*/
tiny4412_net=alloc_etherdev(sizeof(struct net_device));
/*2. net结构体赋值*/
strcpy(tiny4412_net->name, "eth888");//网络设备的名称,使用ifconfig -a可以查看到。
tiny4412_net->netdev_ops=&netdev_ops_test; //虚拟文件操作集合
tiny4412_net->if_port = IF_PORT_10BASET; //协议规范
tiny4412_net->watchdog_timeo = 4 * HZ; //看门狗超时时间
/*3. 随机生成MAC地址*/
eth_hw_addr_random(tiny4412_net);
printk("随机生成的MAC地址如下:\\n");
printk("%X-%X-%X-%X-%X-%X\\n",
tiny4412_net->dev_addr[0],
tiny4412_net->dev_addr[1],
tiny4412_net->dev_addr[2],
tiny4412_net->dev_addr[3],
tiny4412_net->dev_addr[4],
tiny4412_net->dev_addr[5]);
ENC28J60_MacAddr[0]=tiny4412_net->dev_addr[0];
ENC28J60_MacAddr[1]=tiny4412_net->dev_addr[1];
ENC28J60_MacAddr[2]=tiny4412_net->dev_addr[2];
ENC28J60_MacAddr[3]=tiny4412_net->dev_addr[3];
ENC28J60_MacAddr[4]=tiny4412_net->dev_addr[4];
ENC28J60_MacAddr[5]=tiny4412_net->dev_addr[5];
/*注册网络设备*/
register_netdev(tiny4412_net);
printk("网络设备注册成功!\\n");
return 0;
static void __exit Net_test_exit(void)
//注销网络设备
unregister_netdev(tiny4412_net);
/*1. 释放GPIO口使用权*/
gpio_free(Tiny4412_GPIO_SPI_SCK);
gpio_free(Tiny4412_GPIO_SPI_CS);
gpio_free(Tiny4412_GPIO_SPI_MISO);
gpio_free(Tiny4412_GPIO_SPI_MOSI);
gpio_free(ENC28J60_GPIO_REST);
/*2. 释放中断号*/
free_irq(ENC28J60_IRQ,NULL);
/*3. 停止定时器*/
del_timer_sync(&timer_date);
/*4. 清除工作*/
cancel_work_sync(&work_list);
printk("网络设备注销成功!\\n");
module_init(Net_test_init);
module_exit(Net_test_exit);
MODULE_AUTHOR("xiaolong");
MODULE_LICENSE("GPL");
2.2 对应enc28j60.h代码
#ifndef __ENC28J60_H
#define __ENC28J60_H
// ENC28J60 Control Registers
// Control register definitions are a combination of address,
// bank number, and Ethernet/MAC/PHY indicator bits.
// - Register address (bits 0-4)
// - Bank number (bits 5-6)
// - MAC/PHY indicator (bit 7)
#define ADDR_MASK 0x1F
#define BANK_MASK 0x60
#define SPRD_MASK 0x80
// All-bank registers
#define EIE 0x1B
#define EIR 0x1C
#define ESTAT 0x1D
#define ECON2 0x1E
#define ECON1 0x1F
// Bank 0 registers
#define ERDPTL (0x00|0x00)
#define ERDPTH (0x01|0x00)
#define EWRPTL (0x02|0x00)
#define EWRPTH (0x03|0x00)
#define ETXSTL (0x04|0x00)
#define ETXSTH (0x05|0x00)
#define ETXNDL (0x06|0x00)
#define ETXNDH (0x07|0x00)
#define ERXSTL (0x08|0x00)
#define ERXSTH (0x09|0x00)
#define ERXNDL (0x0A|0x00)
#define ERXNDH (0x0B|0x00)
//ERXWRPTH:ERXWRPTL 寄存器定义硬件向FIFO 中
//的哪个位置写入其接收到的字节。 指针是只读的,在成
//功接收到一个数据包后,硬件会自动更新指针。 指针可
//用于判断FIFO 内剩余空间的大小。
#define ERXRDPTL (0x0C|0x00)
#define ERXRDPTH (0x0D|0x00)
#define ERXWRPTL (0x0E|0x00)
#define ERXWRPTH (0x0F|0x00)
#define EDMASTL (0x10|0x00)
#define EDMASTH (0x11|0x00)
#define EDMANDL (0x12|0x00)
#define EDMANDH (0x13|0x00)
#define EDMADSTL (0x14|0x00)
#define EDMADSTH (0x15|0x00)
#define EDMACSL (0x16|0x00)
#define EDMACSH (0x17|0x00)
// Bank 1 registers
#define EHT0 (0x00|0x20)
#define EHT1 (0x01|0x20)
#define EHT2 (0x02|0x20)
#define EHT3 (0x03|0x20)
#define EHT4 (0x04|0x20)
#define EHT5 (0x05|0x20)
#define EHT6 (0x06|0x20)
#define EHT7 (0x07|0x20)
#define EPMM0 (0x08|0x20)
#define EPMM1 (0x09|0x20)
#define EPMM2 (0x0A|0x20)
#define EPMM3 (0x0B|0x20)
#define EPMM4 (0x0C|0x20)
#define EPMM5 (0x0D|0x20)
#define EPMM6 (0x0E|0x20)
#define EPMM7 (0x0F|0x20)
#define EPMCSL (0x10|0x20)
#define EPMCSH (0x11|0x20)
#define EPMOL (0x14|0x20)
#define EPMOH (0x15|0x20)
#define EWOLIE (0x16|0x20)
#define EWOLIR (0x17|0x20)
#define ERXFCON (0x18|0x20)
#define EPKTCNT (0x19|0x20)
// Bank 2 registers
#define MACON1 (0x00|0x40|0x80)
#define MACON2 (0x01|0x40|0x80)
#define MACON3 (0x02|0x40|0x80)
#define MACON4 (0x03|0x40|0x80)
#define MABBIPG (0x04|0x40|0x80)
#define MAIPGL (0x06|0x40|0x80)
#define MAIPGH (0x07|0x40|0x80)
#define MACLCON1 (0x08|0x40|0x80)
#define MACLCON2 (0x09|0x40|0x80)
#define MAMXFLL (0x0A|0x40|0x80)
#define MAMXFLH (0x0B|0x40|0x80)
#define MAPHSUP (0x0D|0x40|0x80)
#define MICON (0x11|0x40|0x80)
#define MICMD (0x12|0x40|0x80)
#define MIREGADR (0x14|0x40|0x80)
#define MIWRL (0x16|0x40|0x80)
#define MIWRH (0x17|0x40|0x80)
#define MIRDL (0x18|0x40|0x80)
#define MIRDH (0x19|0x40|0x80)
// Bank 3 registers
#define MAADR1 (0x00|0x60|0x80)
#define MAADR0 (0x01|0x60|0x80)
#define MAADR3 (0x02|0x60|0x80)
#define MAADR2 (0x03|0x60|0x80)
#define MAADR5 (0x04|0x60|0x80)
#define MAADR4 (0x05|0x60|0x80)
#define EBSTSD (0x06|0x60)
#define EBSTCON (0x07|0x60)
#define EBSTCSL (0x08|0x60)
#define EBSTCSH (0x09|0x60)
#define MISTAT (0x0A|0x60|0x80)
#define EREVID (0x12|0x60)
#define ECOCON (0x15|0x60)
#define EFLOCON (0x17|0x60)
#define EPAUSL (0x18|0x60)
#define EPAUSH (0x19|0x60)
// PHY registers
#define PHCON1 0x00
#define PHSTAT1 0x01
#define PHHID1 0x02
#define PHHID2 0x03
#define PHCON2 0x10
#define PHSTAT2 0x11
#define PHIE 0x12
#define PHIR 0x13
#define PHLCON 0x14
// ENC28J60 ERXFCON Register Bit Definitions
#define ERXFCON_UCEN 0x80
#define ERXFCON_ANDOR 0x40
#define ERXFCON_CRCEN 0x20
#define ERXFCON_PMEN 0x10
#define ERXFCON_MPEN 0x08
#define ERXFCON_HTEN 0x04
#define ERXFCON_MCEN 0x02
#define ERXFCON_BCEN 0x01
// ENC28J60 EIE Register Bit Definitions
#define EIE_INTIE 0x80
#define EIE_PKTIE 0x40
#define EIE_DMAIE 0x20
#define EIE_LINKIE 0x10
#define EIE_TXIE 0x08
#define EIE_WOLIE 0x04
#define EIE_TXERIE 0x02
#define EIE_RXERIE 0x01
// ENC28J60 EIR Register Bit Definitions
#define EIR_PKTIF 0x40
#define EIR_DMAIF 0x20
#define EIR_LINKIF 0x10
#define EIR_TXIF 0x08
#define EIR_WOLIF 0x04
#define EIR_TXERIF 0x02
#define EIR_RXERIF 0x01
// ENC28J60 ESTAT Register Bit Definitions
#define ESTAT_INT 0x80
#define ESTAT_LATECOL 0x10
#define ESTAT_RXBUSY 0x04
#define ESTAT_TXABRT 0x02
#define ESTAT_CLKRDY 0x01
// ENC28J60 ECON2 Register Bit Definitions
#define ECON2_AUTOINC 0x80
#define ECON2_PKTDEC 0x40
#define ECON2_PWRSV 0x20
#define ECON2_VRPS 0x08
// ENC28J60 ECON1 Register Bit Definitions
#define ECON1_TXRST 0x80
#define ECON1_RXRST 0x40
#define ECON1_DMAST 0x20
#define ECON1_CSUMEN 0x10
#define ECON1_TXRTS 0x08
#define ECON1_RXEN 0x04
#define ECON1_BSEL1 0x02
#define ECON1_BSEL0 0x01
// ENC28J60 MACON1 Register Bit Definitions
#define MACON1_LOOPBK 0x10
#define MACON1_TXPAUS 0x08
#define MACON1_RXPAUS 0x04
#define MACON1_PASSALL 0x02
#define MACON1_MARXEN 0x01
// ENC28J60 MACON2 Register Bit Definitions
#define MACON2_MARST 0x80
#define MACON2_RNDRST 0x40
#define MACON2_MARXRST 0x08
#define MACON2_RFUNRST 0x04
#define MACON2_MATXRST 0x02
#define MACON2_TFUNRST 0x01
// ENC28J60 MACON3 Register Bit Definitions
#define MACON3_PADCFG2 0x80
#define MACON3_PADCFG1 0x40
#define MACON3_PADCFG0 0x20
#define MACON3_TXCRCEN 0x10
#define MACON3_PHDRLEN 0x08
#define MACON3_HFRMLEN 0x04
#define MACON3_FRMLNEN 0x02
#define MACON3_FULDPX 0x01
// ENC28J60 MICMD Register Bit Definitions
#define MICMD_MIISCAN 0x02
#define MICMD_MIIRD 0x01
// ENC28J60 MISTAT Register Bit Definitions
#define MISTAT_NVALID 0x04
#define MISTAT_SCAN 0x02
#define MISTAT_BUSY 0x01
// ENC28J60 PHY PHCON1 Register Bit Definitions
#define PHCON1_PRST 0x8000
#define PHCON1_PLOOPBK 0x4000
#define PHCON1_PPWRSV 0x0800
#define PHCON1_PDPXMD 0x0100
// ENC28J60 PHY PHSTAT1 Register Bit Definitions
#define PHSTAT1_PFDPX 0x1000
#define PHSTAT1_PHDPX 0x0800
#define PHSTAT1_LLSTAT 0x0004
#define PHSTAT1_JBSTAT 0x0002
// ENC28J60 PHY PHCON2 Register Bit Definitions
#define PHCON2_FRCLINK 0x4000
#define PHCON2_TXDIS 0x2000
#define PHCON2_JABBER 0x0400
#define PHCON2_HDLDIS 0x0100
// ENC28J60 Packet Control Byte Bit Definitions
#define PKTCTRL_PHUGEEN 0x08
#define PKTCTRL_PPADEN 0x04
#define PKTCTRL_PCRCEN 0x02
#define PKTCTRL_POVERRIDE 0x01
// SPI operation codes
#define ENC28J60_READ_CTRL_REG 0x00
#define ENC28J60_READ_BUF_MEM 0x3A
#define ENC28J60_WRITE_CTRL_REG 0x40
#define ENC28J60_WRITE_BUF_MEM 0x7A
#define ENC28J60_BIT_FIELD_SET 0x80
#define ENC28J60_BIT_FIELD_CLR 0xA0
#define ENC28J60_SOFT_RESET 0xFF
// The RXSTART_INIT should be zero. See Rev. B4 Silicon Errata
// buffer boundaries applied to internal 8K ram
// the entire available packet buffer space is allocated
//
// start with recbuf at 0/
#define RXSTART_INIT 0x0
// receive buffer end
#define RXSTOP_INIT (0x1FFF-1518-1)
// start TX buffer at 0x1FFF-0x0600, pace for one full ethernet frame (0~1518 bytes)
#define TXSTART_INIT (0x1FFF-1518)
// stp TX buffer at end of mem
#define TXSTOP_INIT 0x1FFF
// max frame length which the conroller will accept:
#define MAX_FRAMELEN 1518 // (note: maximum ethernet frame length would be 1518)
void ENC28J60_Reset(void);
u8 ENC28J60_Read_Op(u8 op,u8 addr);
void ENC28J60_Write_Op(u8 op,u8 addr,u8 data);
void ENC28J60_Read_Buf(u32 len,u8* data);
void ENC28J60_Write_Buf(u32 len,u8* data);
void ENC28J60_Set_Bank(u8 bank);
u8 ENC28J60_Read(u8 addr);
void ENC28J60_Write(u8 addr,u8 data);
void ENC28J60_PHY_Write(u8 addr,u32 data);
u8 ENC28J60_Init(u8* macaddr);
u8 ENC28J60_Get_EREVID(void);
void ENC28J60_Packet_Send(u32 len,u8* packet);
u32 ENC28J60_Packet_Receive(u32 maxlen,u8* packet);
#endif
以上是关于Linux下编写ENC28J60网卡驱动,完善网络设备框架的主要内容,如果未能解决你的问题,请参考以下文章
linux enc28j60网卡驱动移植(硬件spi和模拟spi)
ENC28J60基于AVRNET修改ENC28J60驱动过程(STM32+ CubeMx + ENC28J60)