基于FPGA的远程升级系统概述
Posted fpga和matlab
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了基于FPGA的远程升级系统概述相关的知识,希望对你有一定的参考价值。
目录
作者ID :fpga和matlab
CSDN主页:https://blog.csdn.net/ccsss22?type=blog
擅长技术:
1.无线基带,无线图传,编解码
2.机器视觉,图像处理,三维重建
3.人工智能,深度学习
4.智能控制,智能优化
5.其他一、理论基础
通过串口接收升级文件,将升级文件写入EPCS中,然后使用Remote_system_update模块进行升级操作。
存储器类型使用片上RAM,约20KB空间
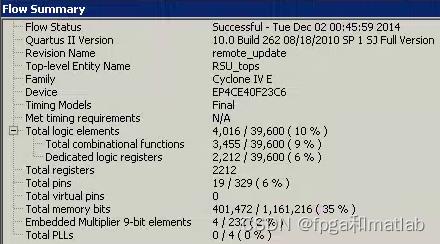
使用的芯片是EP4CE40F23C6
这里,主要的核心部分是基于NIOSII的Remote system update模块的调用,这里在设计说明中,重点介绍一下Remote system update模块的使用方法。
RSU单元主要包括如下几个部分:
第一:页模式的选择
通过页模式选择特性,我们可以选择重配置期间时加载不同的配置程序。在FPGA芯片中,通过PGM[2:0]三个引脚来实现页选择。
第二:工厂配置
工厂配置就是系统的默认配置,当使用增强配置期间的时候,工厂配置会存放在000页。当使用串行配置器件的时候,工作配置则被放在从0X00000000地址开始的空间。工厂配置值能被系统生产商第一次配置进去,静止用户通过远程升级模式进行修改。
第三,应用配置
从远程接收到的配置数据,并存放到远程存储器里除工厂配置的其他的任意的空间。
第四,看门狗计数器
主要用来进行复位计数的功能。
第五,远程程序升级子模块
远程程序升级子模块管理着远程配置特性,这个字模块是由一个远程配置状态机来实现的。
第六,远程配置寄存器
远程配置寄存器主要用在存储配置地址以及引起重配置的错误类型。
系统的设计。
二、核心程序
第一,基于NIOSII的RSU单元模块设计
在SOPC界面中,做如下的IP核总线连接:
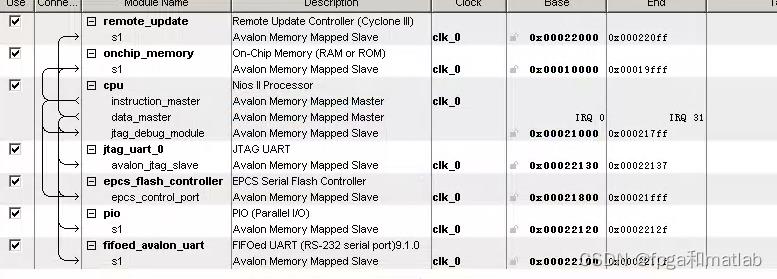
从上面的设置可以看到,整个NiosII系统,主要包括CPU核,片上RAM以及UART串口模块三个部分。
这些模块的参数设置以及地址分配分别如下所示:
片上RAM:
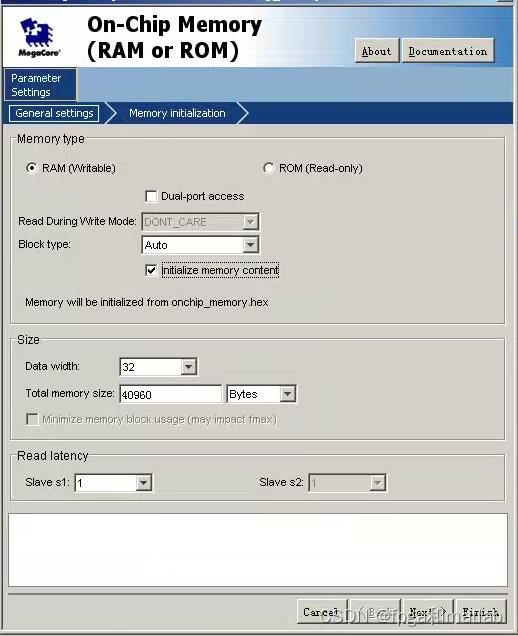
注意,片上存储器的总大小这里设置为40960,当然你也可以改为你所要求的大小。
UART串口:

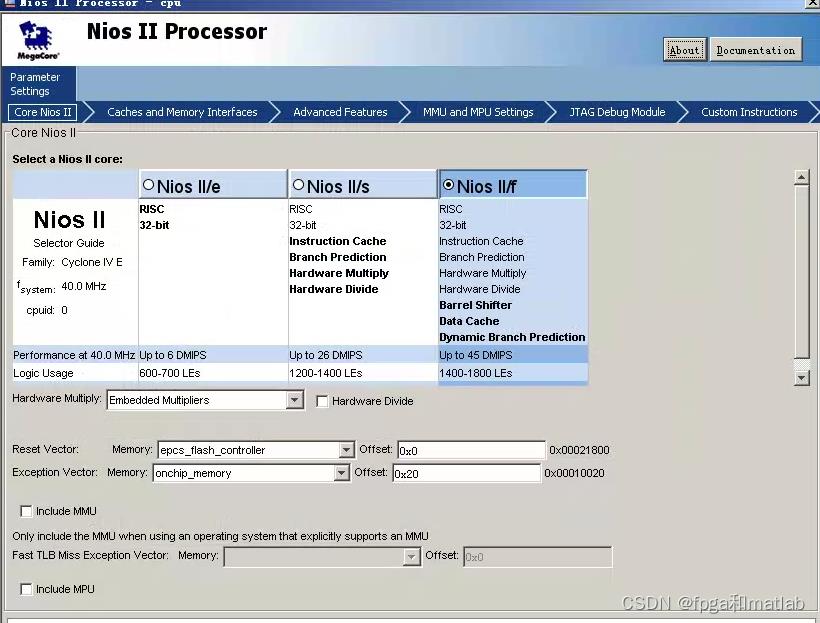
CPU核:
第二,系统整体设计
整个系统的结构如下所示:
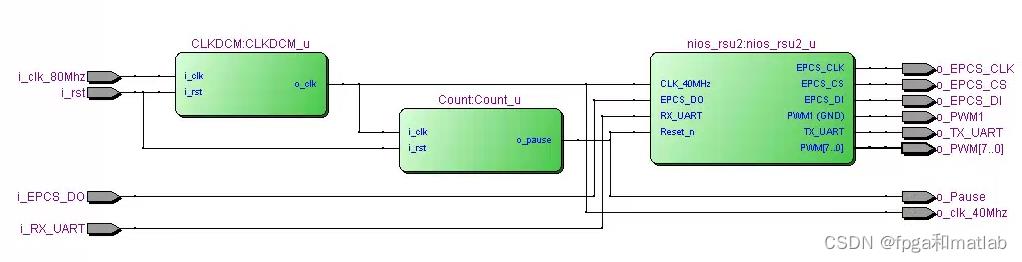
整个系统的资源占用如下所示:
`timescale 1 ns / 1 ps
module RSU_tops(
i_clk_80Mhz,
i_rst,
i_EPCS_DO,
i_RX_UART,
o_clk_40Mhz,
o_Pause,
o_TX_UART,
o_EPCS_CS,
o_EPCS_DI,
o_EPCS_CLK,
o_PWM,
o_PWM1,
o_LED1,
o_LED2
);
input i_clk_80Mhz;
input i_rst;
input i_EPCS_DO;
input i_RX_UART;
output o_clk_40Mhz;
output o_Pause;
output o_TX_UART;
output o_EPCS_CS;
output o_EPCS_DI;
output o_EPCS_CLK;
output [7:0]o_PWM;
output o_PWM1;
output o_LED1;
output o_LED2;
CLKDCM CLKDCM_u(
.i_clk (i_clk_80Mhz),
.i_rst (i_rst),
.o_clk (o_clk_40Mhz)
);
Count Count_u(
.i_clk (o_clk_40Mhz),
.i_rst (i_rst),
.o_pause (o_Pause)
);
nios_rsu2 nios_rsu2_u(
.EPCS_DO (i_EPCS_DO),
.RX_UART (i_RX_UART),
.CLK_40MHz (o_clk_40Mhz),
.Reset_n (o_Pause),
.TX_UART (o_TX_UART),
.EPCS_CS (o_EPCS_CS),
.EPCS_DI (o_EPCS_DI),
.EPCS_CLK (o_EPCS_CLK),
.PWM (o_PWM),
.PWM1 (o_PWM1),
.led1 (o_LED1),
.led2 (o_LED2)
);
endmodule `timescale 1 ns / 1 ps
module nios_rsu2(
EPCS_DO,
RX_UART,
CLK_40MHz,
Reset_n,
TX_UART,
EPCS_CS,
EPCS_DI,
EPCS_CLK,
PWM,
PWM1,
led1,
led2
);
input wire EPCS_DO;
input wire RX_UART;
input wire CLK_40MHz;
input wire Reset_n;
output wire TX_UART;
output wire EPCS_CS;
output wire EPCS_DI;
output wire EPCS_CLK;
output wire [7:0] PWM;
output wire PWM1;
output reg led1;
output reg led2;
Remote_NIOS b2v_inst(
.clk_0(CLK_40MHz),
.reset_n(Reset_n),
.data0_to_the_epcs_flash_controller(EPCS_DO),
.rxd_to_the_fifoed_avalon_uart(RX_UART),
.dclk_from_the_epcs_flash_controller(EPCS_CLK),
.sce_from_the_epcs_flash_controller(EPCS_CS),
.sdo_from_the_epcs_flash_controller(EPCS_DI),
.txd_from_the_fifoed_avalon_uart(TX_UART),
.out_port_from_the_pio(PWM));
assign PWM1 = 1'b0;
wire sel;
assign sel = EPCS_CS;
always @(posedge CLK_40MHz or posedge Reset_n)
begin
if(Reset_n)
begin
led1 <= 1'b0;
led2 <= 1'b0;
end
else begin
if(sel == 1'b1)
begin
led1 <= 1'b0;
led2 <= 1'b1;
end
else begin
led1 <= 1'b1;
led2 <= 1'b0;
end
end
end
endmodule
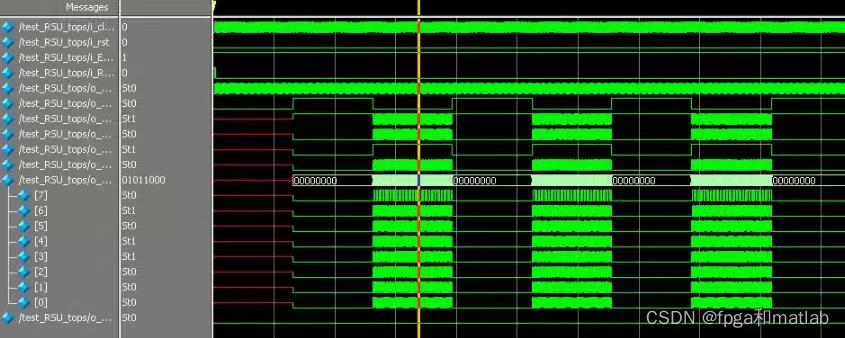
三、仿真测试结果
这里,仿真效果如下图所示:
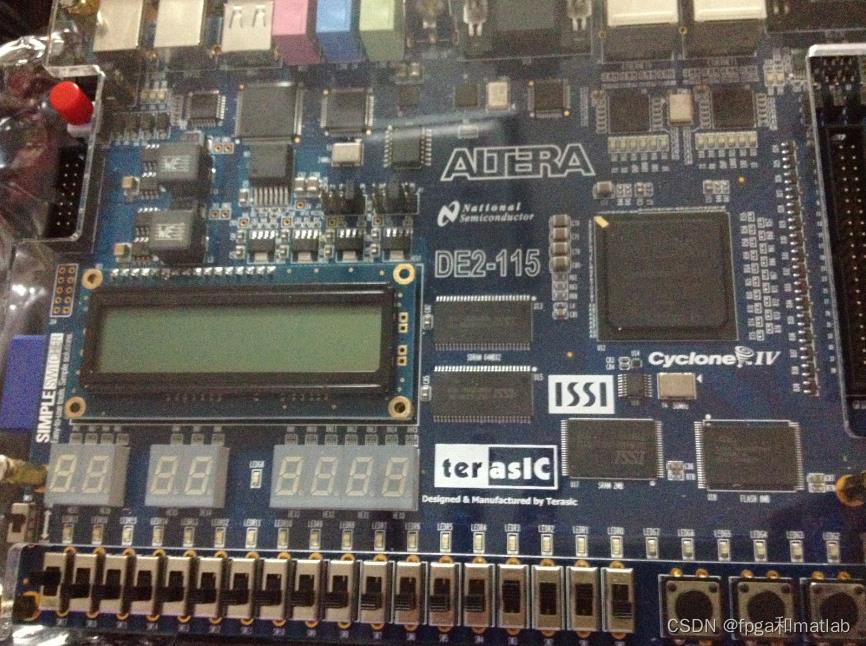
然后我这里下面的测试步骤都是基于这个板子来做的测试,测试步骤:
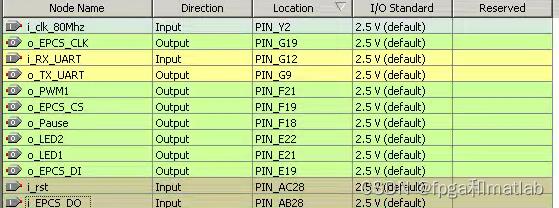
管脚的绑定截图:
然后,我们这里主要观察的是LED1和LED2两个灯的工作情况。这里,我再我的板子上连接的两个绿色的LED灯。
A12-23
以上是关于基于FPGA的远程升级系统概述的主要内容,如果未能解决你的问题,请参考以下文章