Convex Sets and Convex functions
Posted 大饼博士X
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了Convex Sets and Convex functions相关的知识,希望对你有一定的参考价值。
文章目录
第3章 Convex Sets and Convex functions
凸优化问题的定义

凸集的定义:
定义:给定一个集合 C ⊆ R n C \\subseteq \\mathbbR^n C⊆Rn,满足下列条件则称为凸集: x , y ∈ C ⇒ t x + ( 1 − t ) y ∈ C x,y \\in C \\Rightarrow tx+(1-t)y \\in C x,y∈C⇒tx+(1−t)y∈C 对于任意的 0 ≤ t ≤ 1 0≤t≤1 0≤t≤1

直观上看,可以利用下图帮助理解,假定我们的变量在二维空间中,x,y为二维空间变量,黑体线代表的向量为tx+(1−t)y,t取值范围为[0,1],那么无论t怎么变化,向量tx+(1−t)y总会落在x和y张成的集合空间中。[3]

那么从定义出发,我们也能知道非凸集的情况,下图左侧为凸集,右图为非凸集。一句话来概括凸集就是集合内任意两点间连线依旧在集合内。

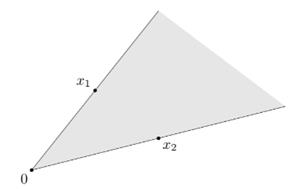
convex hull(凸包) 定义:

给定集合内的任意k个元素
x
1
,
.
.
.
,
x
k
∈
R
n
x_1,...,x_k \\in \\mathbbR^n
x1,...,xk∈Rn,任意的线性组合形式:
θ
1
x
1
+
.
.
.
+
θ
k
x
k
,
θ
i
≥
0
,
∑
i
=
1
k
θ
i
=
1
\\theta_1 x_1+...+\\theta_k x_k,\\theta_i \\geq 0, \\sum_i=1^k\\theta_i=1
θ1x1+...+θkxk,θi≥0,∑i=1kθi=1,称之为集合的convex hull,表示为
c
o
n
v
(
C
)
conv(C)
conv(C)。convex hull总是凸的。可以直观认为凸包就是最外围的元素所围成的集合外壳,下图是两个凸包的例子:

一些凸集的examples:
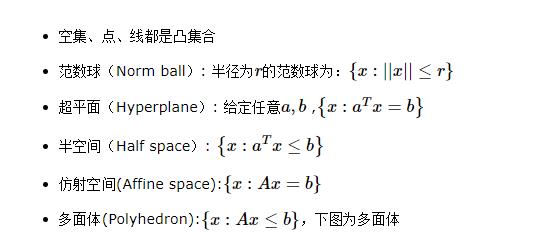


锥(Cone)和凸锥(Convex Cone)的定义

范数锥(Norm cone): ( x , t ) : ∣ ∣ x ∣ ∣ ≤ t \\left \\(x,t):||x|| \\leq t \\right \\ (x,t):∣∣x∣∣≤t,对于一范数和二范数成立。下图取定不同的t做出了三维情况下的图
(讨论:这里我感觉用字母 t t t有一些歧义,和上面定义中的 t t t不是一个含义。范数锥中的 t t t是定义域中的一个维度变量;而上面锥定义中的 t t t是表示一个常数):

凸集的性质:
- 可分离超平面理论(Separating hyperplane theorem):两个不相交的凸集总存在一个超平面能将两者分离,如果 C ⋂ D = ∅ C⋂D=∅ C⋂D=∅,那么总存在着a,b使得有: C ⊆ x : a T x ≤ b C \\subseteq \\left \\x:a^Tx \\leq b \\right \\ C⊆x:aTx≤b, D ⊆ x : a T x ≥ b D \\subseteq \\left \\x:a^Tx \\geq b \\right \\ D⊆x:aTx≥b

- 支撑超平面理论(Supporting hyperplane theorem):凸集边界上的一点必然存在一个支撑超平面穿过该点,即如果C都是非空凸集,
x 0 ∈ b o u n d ( C ) x_0 \\in bound(C) x0∈bound(C),那么必然存在一个超平面a,使得, C ⊆ x : a T x ≤ a T x 0 C \\subseteq \\left \\x:a^Tx \\leq a^T x_0 \\right \\ C⊆x:aTx≤aTx0。如下图:

保凸操作:

(上面是
f
−
1
(
D
)
f^-1(D)
f−1(D),因为借用了[3]的截图,就不重新打了。)
一个例子:
这一章都是一些概念,看的有点晕,哈哈。下面看一下一个证明的例子:
给定一系列的
n
×
n
n\\times n
n×n的对称矩阵,有一种线性矩阵不等式如下,其中
x
∈
R
k
x \\in R^k
x∈Rk。证明:
x
x
x组成的集合C是凸集。
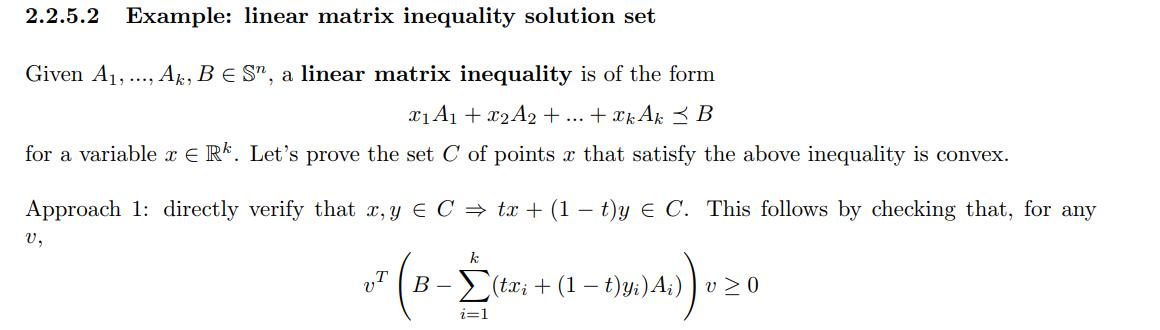
证明过程思路上面写了:只要根据前面提过的凸集定义去证明就行了。如果有
x
,
y
∈
C
x,y \\in C
x,y∈C,只要证明
t
x
+
(
1
−
t
)
y
∈
C
tx+(1-t)y \\in C
tx+(1−t)y∈C,
其中
0
≤
t
≤
1
0\\leq t \\leq 1
0≤t≤1,就可以了。根据题目,我们可以知道:
t
v
T
B
v
−
∑
i
=
1
k
t
x
i
v
T
A
i
v
≥
0
(
1
−
t
)
v
T
B
v
−
∑
i
=
1
k
(
1
−
t
)
y
i
v
T
A
i
v
≥
0
tv^T B v - \\sum_i=1^ktx_iv^TA_i v \\geq 0 \\\\ (1-t)v^T B v - \\sum_i=1^k(1-t)y_iv^TA_i v \\geq 0
tvTBv−i=1∑ktxivTAiv≥0(1−t)vTBv−i=1∑k(1−t)yivTAiv≥0
然后我们可以推出
v T ( B − ∑ i = 1 k ( t x i + ( 1 − t ) y i ) A i ) v = v T B v − ∑ i = 1 k ( t x i + ( 1 − t ) y i ) v T A i v = ( t + ( 1 − t ) ) v T B v − ∑ i = 1 k ( t x i + ( 1 − t ) y i ) v T A i v ≥ 0 v^T \\left(B - \\sum_i=1^k(tx_i + (1-t)y_i)A_i \\right) v \\\\ = v^T B v - \\sum_i=1^k(tx_i + (1-t)y_i)v^TA_i v \\\\ = (t + (1-t))v^T B v - \\sum_i=1^k(tx_i + (1-t)y_i)v^TA_i v \\geq 0\\\\ vT(B−i=1∑k(txi+(1−t)yi)Ai)v=vTBv−i=1∑以上是关于Convex Sets and Convex functions的主要内容,如果未能解决你的问题,请参考以下文章