2.PMAC硬件-一个运动控制系统的实例
Posted 文大侠
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了2.PMAC硬件-一个运动控制系统的实例相关的知识,希望对你有一定的参考价值。
运动控制系统的构成有很多方式,你可以使用嵌入式系统、专用运动控制PLC、工控机+运动控制卡、专用数控装置等等。PMAC控制一般采用的都是工控机+运动控制卡(IPC)的方式,这样有搭建系统比较灵活,可扩展性强等优点。
下面是一个完整的PMAC运动控制系统硬件组成和接线及信号传输示意图。
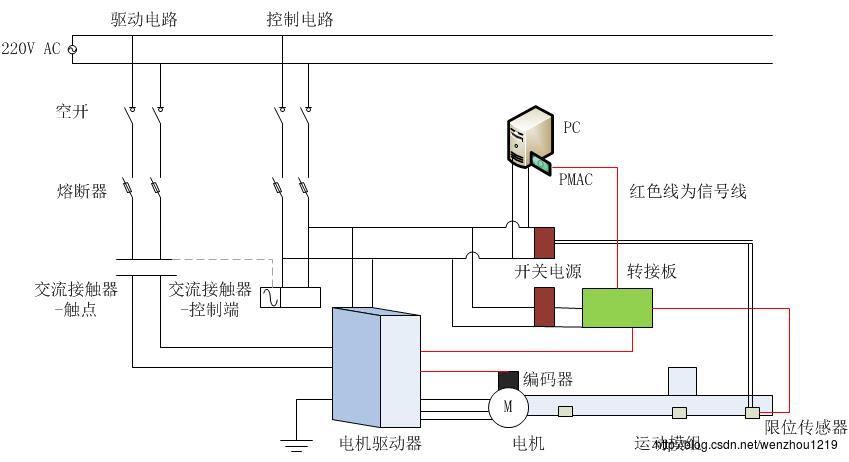
整个运动控制系统按信号流通顺序,由PC->PMAC卡->PMAC卡转接板->电机驱动器->电机(编码器)->运动模组(限位传感器)构成。图中红色线为信号传输示意图。
对于一个控制系统来说,都有驱动电路和控制电路两路电。
图中,驱动电路主要用于给驱动器供电,处理后输出电机驱动电以供电机正常工作,这里不同的驱动器要求不一样(220V或380V),这里为了简单使用220V。
图中,控制电路主要控制整个系统:
1.交流接触器控制主驱动回路的通断(可采用直流接触器24V或交流接触器220V,这里用220V)
2.电机驱动器控制电路供电(不同的驱动器要求不一样,直流24V或交流220V,这里为了简单使用220V)
3.转接板供电(转接板是将PMAC的信号分流,可使用官方转接板或自行设计的转接板,220V变压后输出15V给转接板供电)
4.图中的限位传感器供电,220V变压后输出24V给转接板供电。(这里只是示意,实际中信号线和供电线都是从转接板走线)
下图是更加形象的说明整个系统的构成:
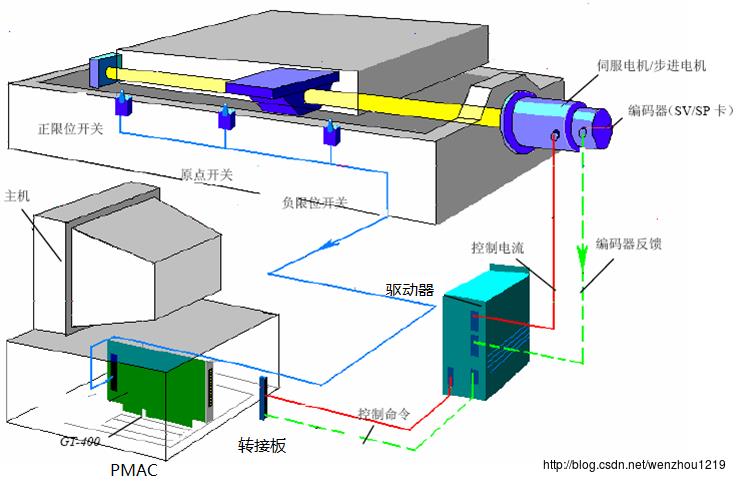
图中的正负限位起保护作用,零限位用于编码器+滚阻丝杠模组回零时找到原点(因为编码器一般是增量编码器、不知道自己的当前位置),如果是光栅尺反馈也可以使用标记原点来回零。
注意图中的运动模组,这里使用的是伺服电机+编码器+滚珠丝杠模组,构成半闭环系统,也可以使用直线电机+光栅尺(或伺服电机+编码器+滚珠丝杠模组+光栅尺)构成全闭环系统。
如果是滚珠丝杠模组,需要了解导程这个概念,即丝杠转动一周模组前进的距离,常见导程为10mm,20mm。
如果是使用光栅尺作反馈,需要了解光栅尺分辨率这个概念。光栅尺的分辨率,是指光栅尺可读取并输出的最小长度变化,对应的参数有:每毫米光栅刻线数、脉冲数、细分等。目前国内光栅尺分辨率一般有5μm、1μm、0.5μm、0.2μm、0.1μm。以每毫米50线光栅为例,经过4细分,就能得到很简单的5μm的分辨率,至于高分辨率的光栅尺,就必须采用电子细分技术。
再说整个模组的定位精度和重复定位精度,简单来说定位精度就是在一次定位测量中运动测量结果和实际目标指令距离的偏差范围,重复定位精度就是在多次定位测量中运动测量结果相互之间的偏差范围。
整个模组的定位精度和重复定位精度是我们在设计一个运动控制系统时必须考虑的因素,这个受诸多因素的影响,必须认真考虑。如光学部分、机械部分 、电气部分等等。
这里有个常见的问题需要强调,整个模组的定位精度和重复定位精度是由实际测量元件和运动元件决定的,如果只是提高编码器、光栅尺等测量元件的精度,对于运动部分(电机、模组)的精度不够,那么整个模组的定位精度和重复定位精度依旧提不上去,举个最简单的例子,现在在100mm处,想运动到100.1mm处,光栅尺、编码器的精度可精确到0.1um,但是电机+模组精度有限,一个脉冲就跑了1mm,那么无论如何也是不能够跑到100.1mm处的啦。经常有人说我的测量精度是够的,为什么不能够到精确运动啊,这个很可能和你的运动部分有关系。
至此,了解PMAC整个运动控制系统的构成,下面就可以开始使用它了。这篇教程主要是为了进行PMAC软件开发的人员写的,如果是设计整个控制系统的设计人员需要进一步去了解各方面的知识。
原创,转载请注明来自http://blog.csdn.net/wenzhou1219
以上是关于2.PMAC硬件-一个运动控制系统的实例的主要内容,如果未能解决你的问题,请参考以下文章
实例3,stc8a利用内置的PWM模块,控制小车直流电机运动
微信公众号控制硬件14 分享安信可微信公众号定位NB-IoT模组的源码和实现过程,可实现远程查看模组定位位置。(附带源码)
微信公众号控制硬件14 分享安信可微信公众号定位NB-IoT模组的源码和实现过程,可实现远程查看模组定位位置。(附带源码)