上海中学科技节作品评选文档
Posted 卓晴
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了上海中学科技节作品评选文档相关的知识,希望对你有一定的参考价值。

§01 科技节作品
这部分内容是今年(2022-05-20)上海中学科技节中学生提交的作品评选。每年参与这个活动,也让我们了解到当年中学生科技创作和兴趣方向。
评审要求
从提交的工程方向的论文中评审出4篇论文,书写200字的评语进入下一轮次的线上评审。评审出五篇论文被授予三等奖。
【表1-1 评选论文文件名称】| 送审编号 | 课题名称 | 评审结论 |
|---|---|---|
| 1 | 基于YOLOv4的智能服装搭配系统.doc | |
| 2 | 微信“垃圾分类学习系统”小程序的设计与制作.doc | |
| 6 | 基于拉绳驱动及液压混合驱动的软体模块化仿真机械手.docx | |
| 7 | 基于摩洛哥蜘蛛运动机理的仿生轮足复合式机器人.pdf | |
| 9 | 用于中央空调管道检测的模块化可变径机器人.docx | |
| 29 | 子母机水下探测协作机器人.pdf | |
| 30 | 毛刷振动前行机器人.pdf | |
| 33 | 孤儿商品自动归位机器人.pdf | |
| 36 | 可变形多边形移动机器人.pdf | |
| 37 | 盲文点字输入装置的设计与实现.pdf | |
| 38 | 大型会议场景下的智能分区会议排座系统研究.pdf | |
| 39 | 关于重接炮与导轨炮的分开与比较研究.pdf | |
| 23 | 文本情感分析技术在青少年心理中的应用研究.pdf |
每年上海中学的科技节,我们都去上海参加评审。今年因为疫情,改为线上评审和答辩。后附材料是请你负责评审的课题。请评出4篇最好的,给出200字评语,进入25日的线上答辩;评出5篇直接给三等奖,剩下的不给奖。请争取21日下午把结果返回我。另线上答辩活动初定时间:5月25日周三或者5月26日周四,下午约15点开始;请预留时间参加。谢谢!
§02 论文阅读
论文(1)
- 论文题目: 基于YOLOv4的智能服装搭配系统
论文中提到一个时尚衣服搭配网站: chictopia 。
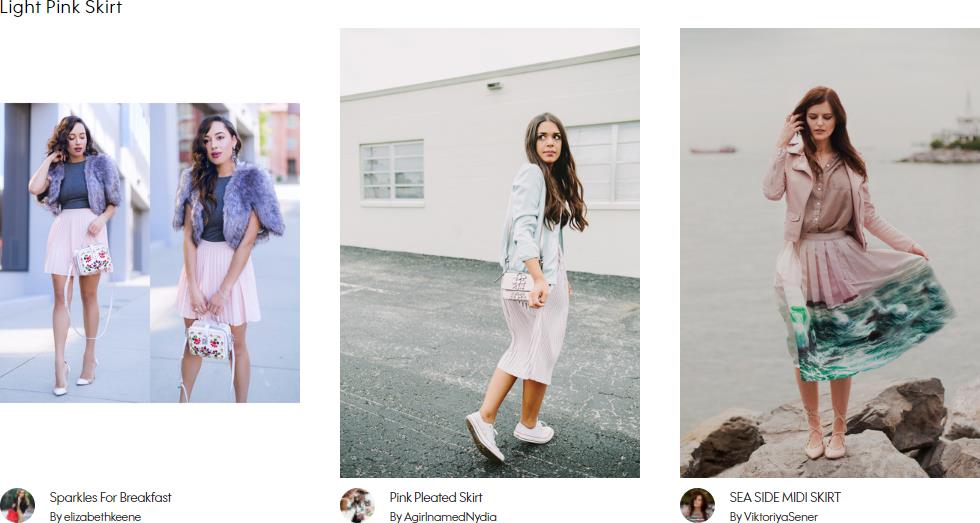
▲ 图2.1.1 Chictopia网站内展示的内容
面对具有反爬取能力的网站,采用了冷却策略。
由于网站具备一定的反爬取能力,在实际实现过程中,遇到了爬取一段时间后需要冷却的问题。采取的应对方式是使用了第三方IP池,并随机调整爬取时间间隔。
评审意见
本文实际上是基于两部分工作:一是YoloV4对图片中的时装进行检测; 而是使用网络爬虫编程下载了Chictopia网站上的时装图像库。
但论文最后并没有将两部分工作进行集中起来,并给出实际工作效果。因此该论文工作不完整。
评审结论
不建议进行推荐。
论文(2)
- 论文题目: 微信“垃圾分类学习系统”小程序的设计与制作
- 微信开发者工具:https://developers.weixin.qq.com/miniprogram/dev/devtools/stable.html
矢量图形设计软件: - sketch 软件;
- 在https://www.photopea.com可以免费进行图表设计和编辑。
评审意见
科技作品内容选择帮助儿童提高垃圾分类能力小程序开发,具有重要的应用价值。作品论文文献调研综述较为深入,对小程序开发的功能设计、开发实现以及功能测试较为完整。对于开发过程中遇到的技术问题也给出了解决方案。作品利用百度AI图像识别垃圾识别技术引入小程序中,提高了识别的可靠性。利用游戏方式寓教于乐,也是符合儿童学习规律。作品内容反映了作者强的软件开发能力以及信息技术应用能力,文档写作规范完整。
评审结论
推荐为线上答辩候选作品。
论文(3)
- 论文题目: 智能化学实验室
评审意见
论文中对于所使用的硬件,特别是传感器部分的型号没有给出具体信息,对样会对设计合理性评判麻烦。
评审结论
作品内容比较丰富。 论文写作规范。
作为三等奖推荐作品。
论文(6)
- 论文题目: 基于拉绳驱动及液压混合驱动的软体模块化仿真机械手
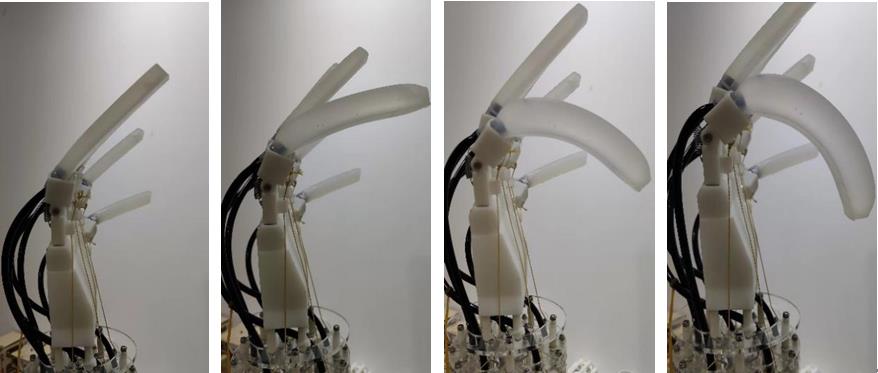
▲ 图2.4.1 机械手在拉线驱动下的动作
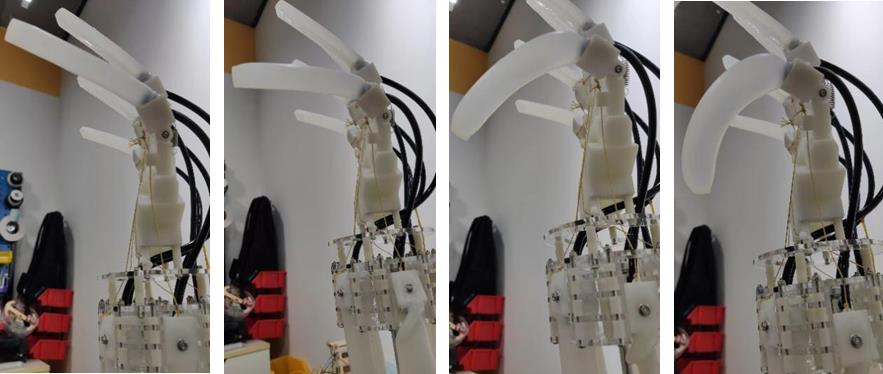
▲ 图2.4.2 机械手在拉线驱动下的动作
评审意见
内容相对比较丰富, 实验数据详尽。
评审结论
可以推荐为三等奖。
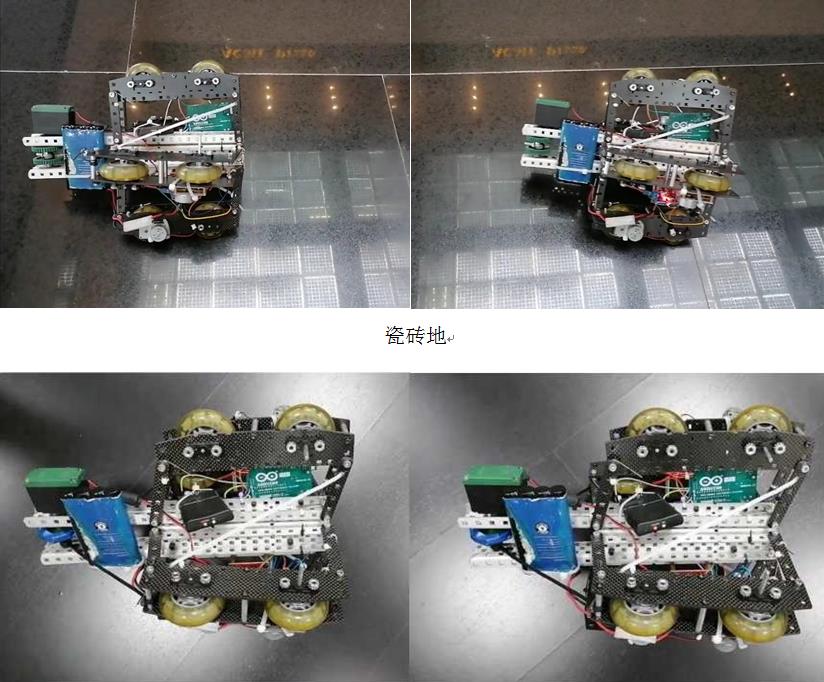
论文(7)
- 论文题目: 基于摩洛哥蜘蛛运动机理的仿生轮足复合式机器人
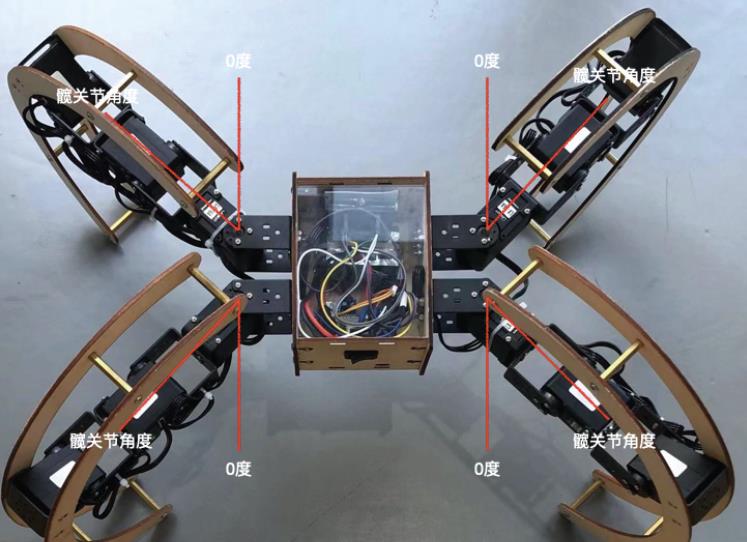
▲ 图2.5.1 髋关节机器人控制
评审意见
本科技作品选择摩洛哥蜘蛛仿生轮足复合式机器人进行研究,具有重要的工程应用价值。作品完成了轮足机器人设计制作。 通过机械控制实现了机器人的翻滚移动和三种移动步态行进方式。通过实验测试了实验平台最高跨越范围,并通过 优化斜坡滚动步态提高了防止机器人侧翻能力。论文写作规范,数据详实,分析充分,反映了作者具有强的实验研究能力。论文在系统建模和理论分析方面还有待进一步提高。
评审结论
推荐进行线上答辩。
论文(9)
- 论文题目: 用于中央空调管道检测的模块化可变径机器人
▲ 图2.6.1 可变径机器人

▲ 图2.6.2 可变径机器人
评审意见
评审结论
论文(29)
- 论文题目: 子母机水下探测协作机器人
评审意见
本作品搭建了子母水下探测协作机器人系统,探索解决海底大范围长时间检测问题,具有重要的工程 应用价值。
评审结论
论文(30)
- 论文题目: 毛刷振动前行机器人
评审意见
本课题研究了震动毛刷行进机器人结构设计与行进控制问题,为基于该机理设计机器人提供理论和实验基础。作品搭建了一套震动毛刷行进机器人平涛,测试了该机器人转向、爬坡以及行进速度的性能,验证了设计方案的可行性。论文书写规范,实验数据和分析详实。反映了作品作者强的工程实践能力。论文还需要在机器人结构方面进行更加完善的优化分析。
评审结论
论文(33)
- 论文题目: 孤儿商品自动归位机器人
评审意见
评审结论
论文(36)
- 论文题目: 可变形多边形移动机器人
评审意见
作品实现了一种可变性四连杆移动机器人设计与制作,能够适应不同作业空间大小完成形变。通过在机器人上增加红外和超声传感器完成自动变形,提高了机器人移动效率和灵活性。作品硬件和软件完成度较高,设计的功能都得到了实验验证。 论文书写规范,叙述清晰, 设计功能新颖合理。反映出作者具有强的工程实践与创新能力。论文中对于机器人在不同模态下运行性能和适用条件还需进一步分析讨论。
评审结论
论文(37)
- 论文题目: 盲文点字输入装置的设计与实现
评审意见
评审结论
论文(38)
- 论文题目: 大型会议场景下的智能分区会议排座系统研究
评审意见
评审结论
论文(39)
- 论文题目: 关于重接炮与导轨炮的分开与比较研究
评审意见
评审结论
论文(23)
- 论文题目: 文本情感分析技术在青少年心理中的应用研究
评审意见
评审结论
以上是关于上海中学科技节作品评选文档的主要内容,如果未能解决你的问题,请参考以下文章
[案例分享] LightningChart被应用于中科院光学与精密机械领域中的光学-简数科技
荣誉证书-上海数采物联网科技荣获国际传感器创新大赛创新产品组优秀奖
获奖名单码猿编程“2019年度优秀作品评选大赛”获奖名单公示