3d激光雷达开发(ransac的思想)
Posted 费晓行
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了3d激光雷达开发(ransac的思想)相关的知识,希望对你有一定的参考价值。
【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
前面我们写了平面分割(https://blog.csdn.net/feixiaoxing/article/details/123388791?spm=1001.2014.3001.5501)、圆柱分割(https://blog.csdn.net/feixiaoxing/article/details/123389321?spm=1001.2014.3001.5501)这两篇文章。细心的同学可能发现,这里面都提到了ransac,那什么是ransac呢?
所谓ransac,全称是random sample consensus,也就是随机采样一致性。名字听上去有点拗口,不妨举个例子来解释。假设一堆点云数据,我们怎么从中找到平面呢?一个简单的方法就是猜?随机找到几个点,算出一个平面,然后计算每个点距离这个平面的距离。继续撒点,如果发现新的点比原来的好,也就是其他点距离平面距离更小,那么更新老的点;否则继续寻找。这个里面,其实做了两个假设,一个假设是我们撒的点正好就在平面上,一个假设是只要样本多,总能找到合适的点。
网上有一些说明这个原理的文章,部分还提供了代码,比如这一篇,https://zhuanlan.zhihu.com/p/62238520,读起来很是不错。
1、原来的代码有几处bug,修复了一下,
1.1 i和iters的比较修改为while i < iters:
1.2 添加i += 1
1.3 修正sigma=3,主要是为了提高运行速度,不用等太久
1.4 添加try-except,防止出现除0异常
1.5 添加UTF-8,不然中文过不了
2、修改后的代码如下所示,
#!/usr/bin/python
# -*- coding: UTF-8 -*-
import numpy as np
import matplotlib.pyplot as plt
import random
import math
# 数据量。
SIZE = 50
# 产生数据。np.linspace 返回一个一维数组,SIZE指定数组长度。
# 数组最小值是0,最大值是10。所有元素间隔相等。
X = np.linspace(0, 10, SIZE)
Y = 3 * X + 10
fig = plt.figure()
# 画图区域分成1行1列。选择第一块区域。
ax1 = fig.add_subplot(1,1, 1)
# 标题
ax1.set_title("RANSAC")
# 让散点图的数据更加随机并且添加一些噪声。
random_x = []
random_y = []
# 添加直线随机噪声
for i in range(SIZE):
random_x.append(X[i] + random.uniform(-0.5, 0.5))
random_y.append(Y[i] + random.uniform(-0.5, 0.5))
# 添加随机噪声
for i in range(SIZE):
random_x.append(random.uniform(0,10))
random_y.append(random.uniform(10,40))
RANDOM_X = np.array(random_x) # 散点图的横轴。
RANDOM_Y = np.array(random_y) # 散点图的纵轴。
# 画散点图。
ax1.scatter(RANDOM_X, RANDOM_Y)
# 横轴名称。
ax1.set_xlabel("x")
# 纵轴名称。
ax1.set_ylabel("y")
# 使用RANSAC算法估算模型
# 迭代最大次数,每次得到更好的估计会优化iters的数值
iters = 100000
# 数据和模型之间可接受的差值
sigma = 3
# 最好模型的参数估计和内点数目
best_a = 0
best_b = 0
pretotal = 0
# 希望的得到正确模型的概率
P = 0.99
i = 0
while i < iters:
# i += 1
i += 1
# 随机在数据中红选出两个点去求解模型
sample_index = random.sample(range(SIZE * 2),2)
x_1 = RANDOM_X[sample_index[0]]
x_2 = RANDOM_X[sample_index[1]]
y_1 = RANDOM_Y[sample_index[0]]
y_2 = RANDOM_Y[sample_index[1]]
# y = ax + b 求解出a,b
a = (y_2 - y_1) / (x_2 - x_1)
b = y_1 - a * x_1
# 算出内点数目
total_inlier = 0
for index in range(SIZE * 2):
y_estimate = a * RANDOM_X[index] + b
if abs(y_estimate - RANDOM_Y[index]) < sigma:
total_inlier = total_inlier + 1
# 判断当前的模型是否比之前估算的模型好
if total_inlier > pretotal:
try:
iters = math.log(1 - P) / math.log(1 - pow(total_inlier / (SIZE * 2), 2))
except ZeroDivisionError:
pass
pretotal = total_inlier
best_a = a
best_b = b
# 判断是否当前模型已经符合超过一半的点
if total_inlier > SIZE:
break
# 用我们得到的最佳估计画图
Y = best_a * RANDOM_X + best_b
# 直线图
ax1.plot(RANDOM_X, Y)
text = "best_a = " + str(best_a) + "\\nbest_b = " + str(best_b)
plt.text(5,10, text,
fontdict='size': 8, 'color': 'r')
plt.show()3、实际效果
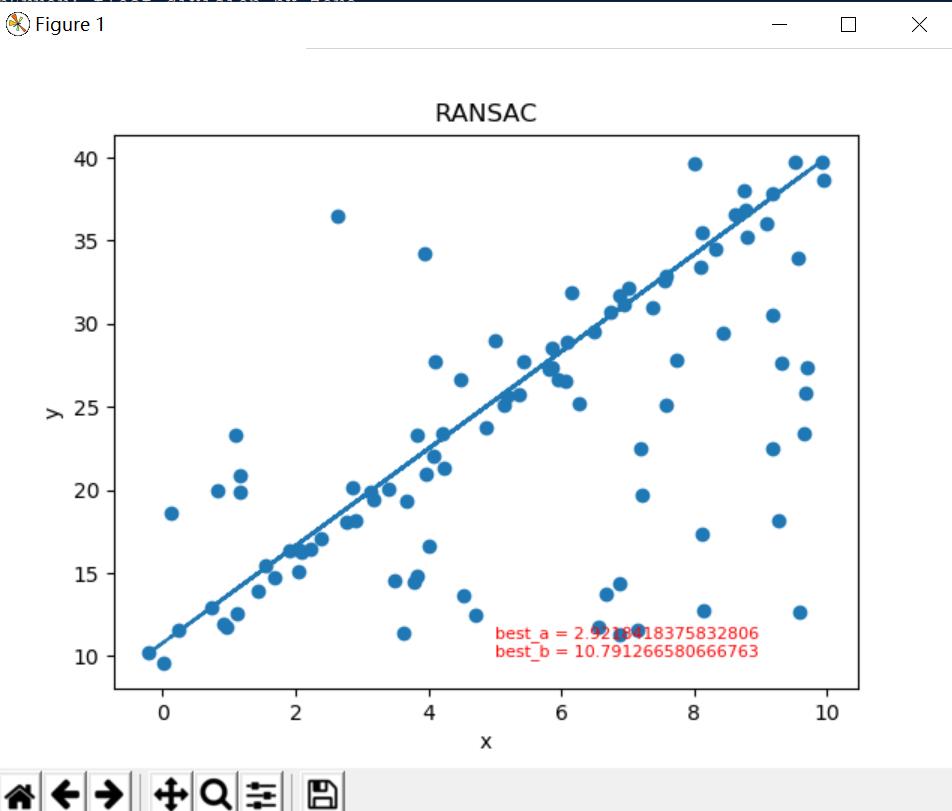
代码没有修改之前,可能会出现除0错误,而且执行时间很长,有差不多10几秒钟,修改后可以短时间快速出结果。
4、最有意思的更新
# 判断当前的模型是否比之前估算的模型好
if total_inlier > pretotal:
try:
iters = math.log(1 - P) / math.log(1 - pow(total_inlier / (SIZE * 2), 2))
except ZeroDivisionError:
pass
pretotal = total_inlier
best_a = a
best_b = b对iters的重新计算是最有意思的,实际效果也许有限。注意虽然SIZE是50,但是实际random_x、random_y的大小是100,所以这里乘以2。此外后面一个2,代表每次只需取两个点即可,所以N=2。其他部分和k=log(1-P)/log(1-t的N次方)这个公式是完全匹配的。
以上是关于3d激光雷达开发(ransac的思想)的主要内容,如果未能解决你的问题,请参考以下文章