项目二 PLC与RobotStudio联合仿真激光切割工作站——仿真模型搭建
Posted 巨巨
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了项目二 PLC与RobotStudio联合仿真激光切割工作站——仿真模型搭建相关的知识,希望对你有一定的参考价值。
项目二 PLC与RobotStudio联合仿真激光切割工作站——仿真模型搭建

一、任务描述
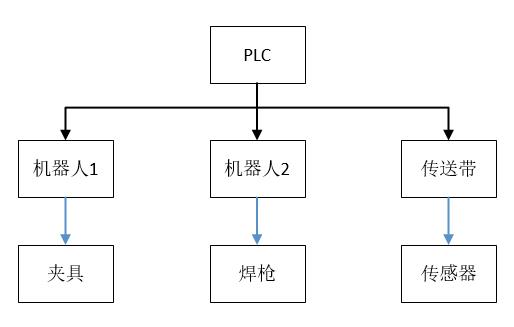
上图给出了整个任务的描述和基础分析。本任务牵涉到两台机器人联合仿真,整体思路有很多种。这里为了配合PLC练习,采取以PLC为中心的仿真方式。即机器人、传送带都是和PLC进行交互,相互之间不进行交互的方式来完成项目。其系统控制架构图如下图所示。
二、工作站布局
(1)创建项目,并添加两台机器人到工作区

(2)调整机器人的位置
选中IRB1600_ROB_HJ,设定位置。

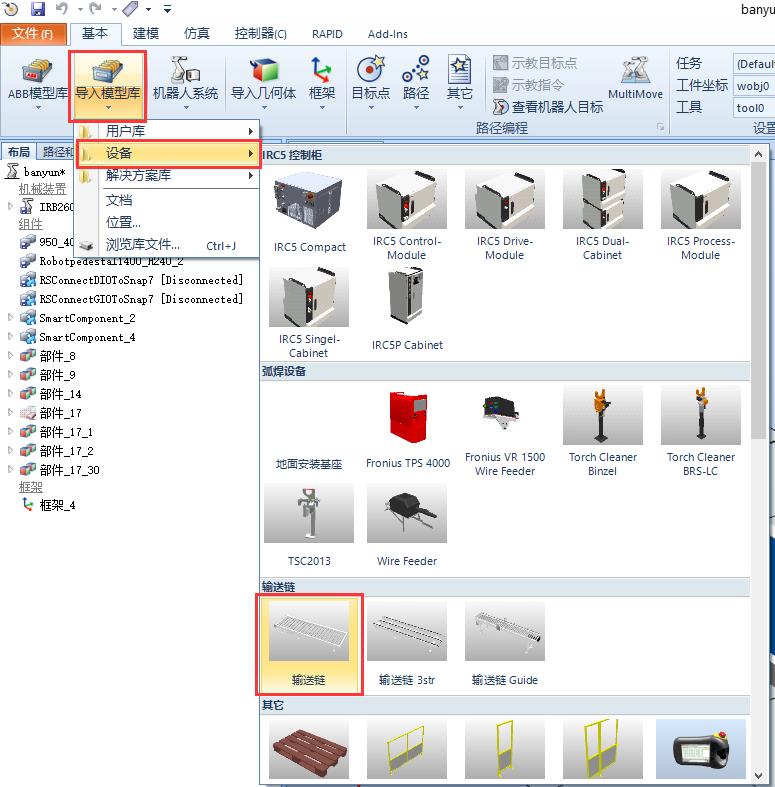
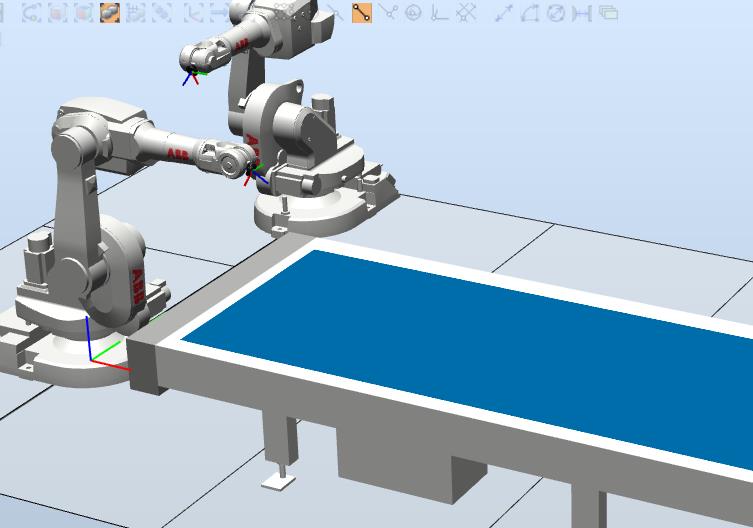
(3)添加传送带并调整位置
结果如下图

(4)创建皮带

选中皮带,右键修改,设定颜色.

结果为:
选中皮带,右键修改,取消掉可由传感器检测前面的对号。
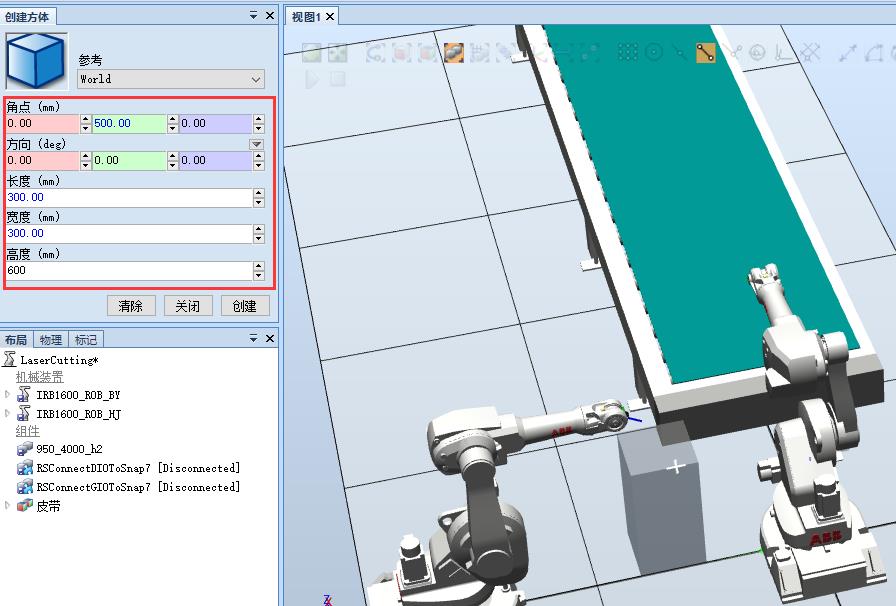
(5)创建焊接工作台
在两个机器人的中间部位创建矩形体,参数如图所示。
修改工作台的颜色并取消掉可由传感器检测。

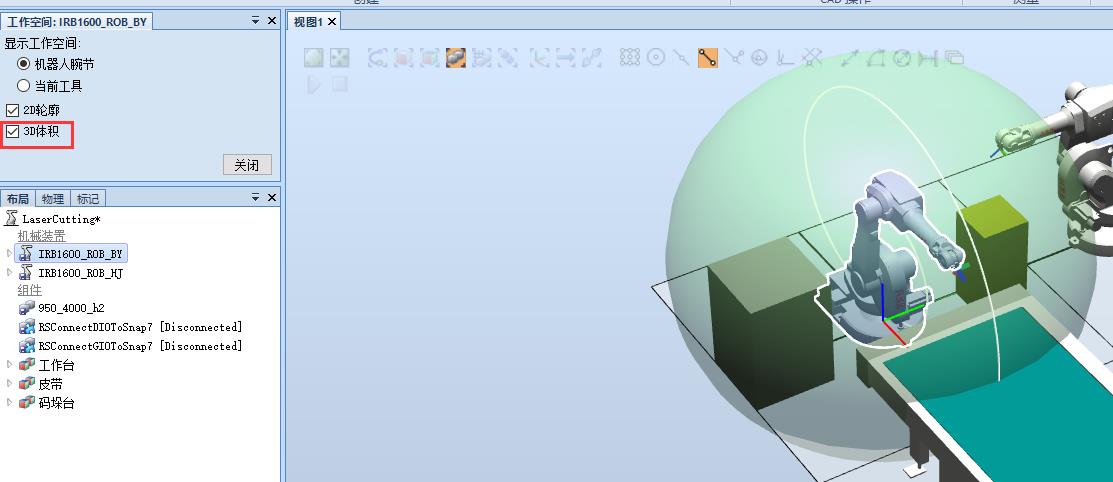
(6)创建码垛工作台
在搬运机器人的另一侧添加一个矩形体作为码垛工作台。并右键击搬运机器人,查看其工作空间,如图所示。
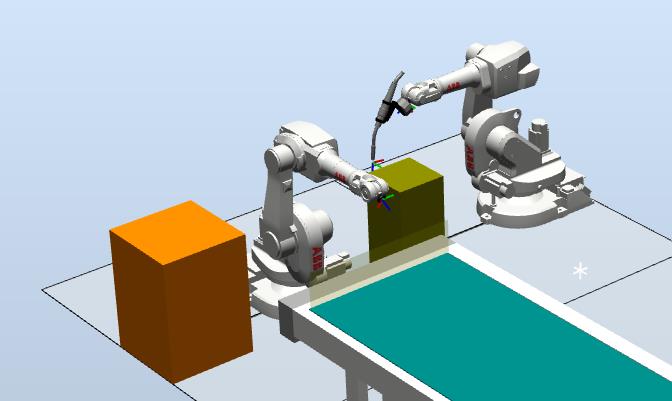
(7)创建工件

如图所示,在皮带末端创建长方体工件。创建完成后,修改名称和修改颜色。注意:这里不能取消掉工件的被传感器。布局结果如图所示。

(8)创建皮带末端传感器

如下图所示,创建传感器。

(9)添加焊枪工具
添加AW Gun PSF 25

右键击,将该工具安装到焊接机器人末端。

弹出是否更新位置,选择是

结果如图所示。
(10)添加吸盘工具
1)加载工具模型
采用导入外部模型的方式加载工具。

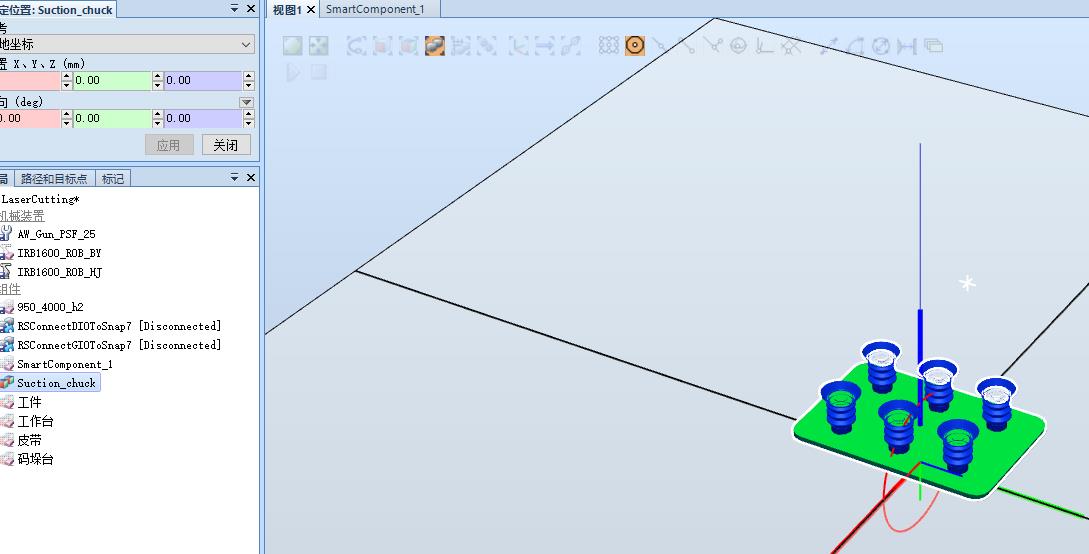
2)查看导入几何体的位置

3)设定工具本地原点
工具安装过程的原理:工具模型的本地坐标系与机器人法兰盘坐标系Tool0重合,工具末端的工具坐标系框架即作为机器人的工具坐标系。
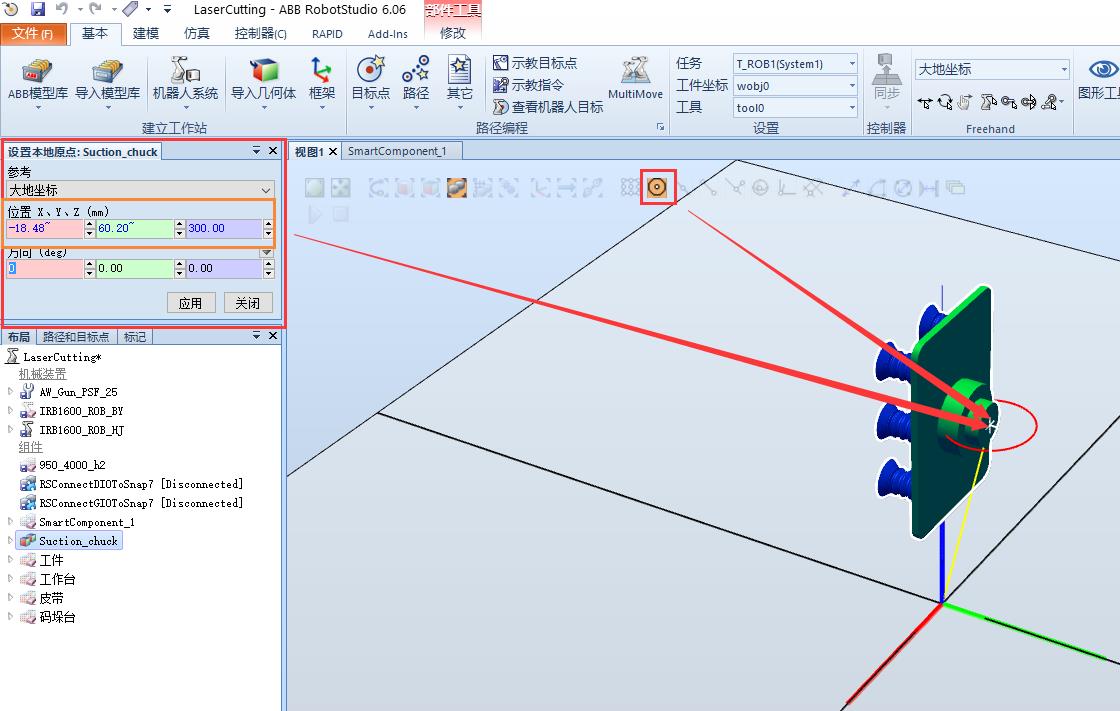
步骤1)右击工具模型Suction_chuck,选择”设定本地原点“命令;
步骤2)设置捕捉方式为“捕捉中心”,选择工具的中心点,单击应用,如图所示。
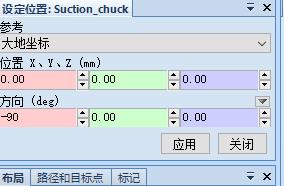
步骤3)选择位置,设定位置命令,将所有位置数据设置为0,如图所示。
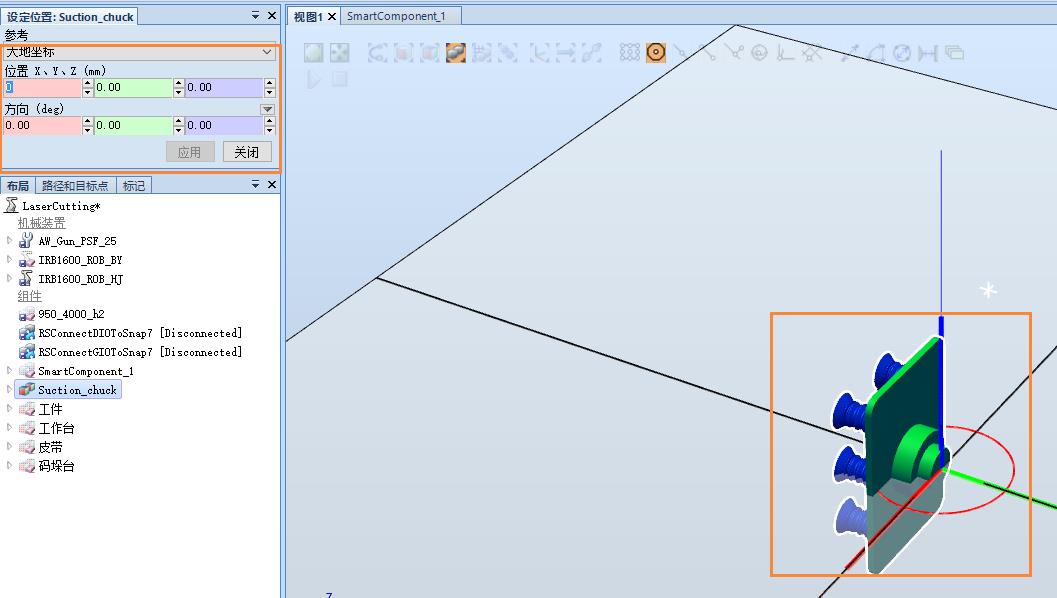
步骤4)将工具模型的位置调整为向上。继续调整位置为,如图所示。
步骤5)设定工具的当前位置为本地原点。选中工具,点击修改,设定本地原点。

步骤6)设定工具坐标系框架
选择框架下的创建框架,框架位置通过捕捉圆心位置,选择如图位置。点击创建,得到框架1.

步骤7)创建工具
选择建模中的创建工具,弹出“创建工具”对话框。


步骤8)安装工具到搬运机器人,其过程与安装焊枪安装过程相同。
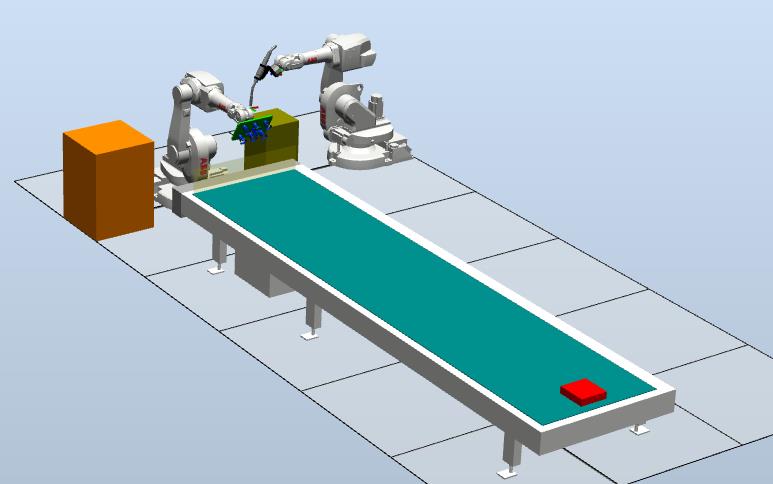
至此完成仿真模型的搭建。效果如图所示。
以上是关于项目二 PLC与RobotStudio联合仿真激光切割工作站——仿真模型搭建的主要内容,如果未能解决你的问题,请参考以下文章
ubuntu20 autoware+carla联合仿真通过激光雷达制作点云地图
labview NI softmotion与SolidWorks联合仿真问题
radar毫米波雷达静态障碍物识别及其相关资料(仿真生成标定运动估计静态障碍物识别)