控制系统数学模型的线性化
Posted yangmi511
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了控制系统数学模型的线性化相关的知识,希望对你有一定的参考价值。
1 引言
自然界中并不存在真正的线性系统,而所谓的线性系统,也只是在一定的工作范围内保持其线性关系。
实际上,所有元件和系统在不同程度上,均具有非线性的性质。
对于包含非线性函数关系的系统来说,非线性数学模型的建立和求解过程是非常复杂的。
而对于大部分元件和系统来说,当信号或变量变化范围不大或非线性不太严重时,都可以近似地线性化。
所谓线性化,就是在一定条件下作某种近似,或者缩小一些工作范围,而将非线性微分方程近似地作为线性微分方程来处理。
2 线性系统
线性系统,可以用线性微分方程描述的系统。
线性是指系统满足叠加定理,即:
1. 可加性
![]()
2. 齐次性
![]()
或者:
![]()
3 非线性数学模型的线性化
线性系统微分方程的一般形式:
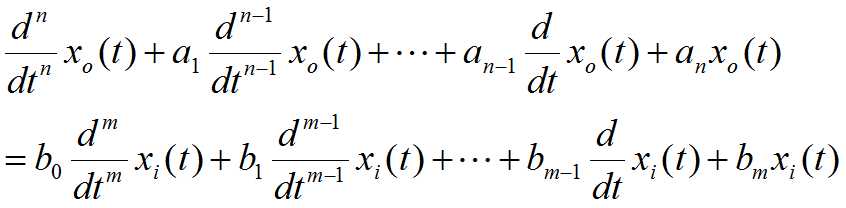
式中,a1,a2,...,an和b1,b2,...,bn为由系统结构参数决定的实常数,m≤n。
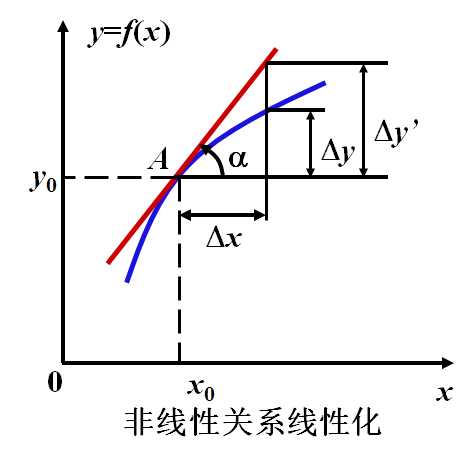
3.1 泰勒级数展开法
函数y=f(x)在其平衡点(x0, y0)附近的泰勒级数展开式为:
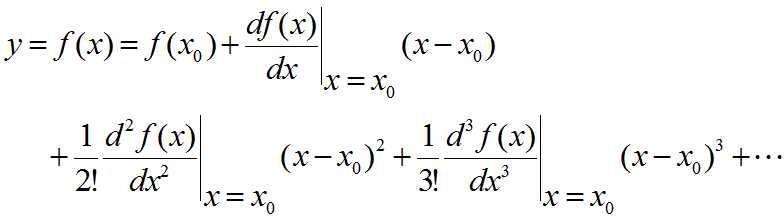
略去含有高于一次的增量Δx=x-x0的项,则:
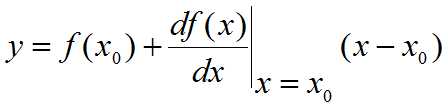

上式即为非线性系统的线性化模型,称为增量方程。y0=f(x0)称为系统的静态方程。
由于反馈系统不允许出现大的偏差,因此,这种线性化方法对于闭环控制系统具有实际意义。
增量方程的数学含义就是将参考坐标的原点移到系统或元件的平衡工作点上,对于实际系统就是以正常工作状态为研究系统运动的起始点,这时,系统所有的初始条件均为零。
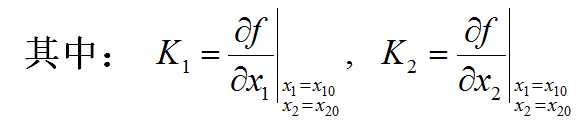
对于多变量系统,同样可以采用泰勒级数展开获得线性化的增量方程。

![]()
![]()
3.2 滑动线性法——切线法
线性化增量方程为:
![]()
切线法就是泰勒级数法的几何表达。
3.3 系统线性化微分方程的建立
1. 确定系统各组成元件在平衡态的工作点。
2. 列出各组成元件在工作点附近的增量方程。
3. 消除中间变量,得到以增量表示的线性化微分方程。
实例:单摆运动线性化
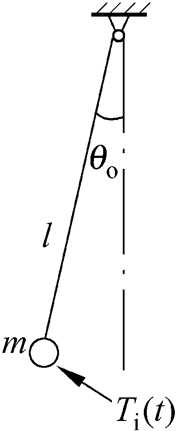
根据牛顿第二定律:
![]()
将非线性项sinθ在θ0=0点附近泰勒展开,取线性主部即实现线性化。
![]()
4 线性化处理的注意事项
1. 线性化方程的系数与平衡工作点的选择有关。
2. 线性化是有条件的,必须注意线性化方程适用的工作范围。
3. 某些典型的本质非线性,如继电器特性、间隙、死区等,由于存在不连续点,不能通过泰勒展开进行线性化,只有当它们对系统影响很小时才能忽略不计,否则只能作为非线性问题处理。
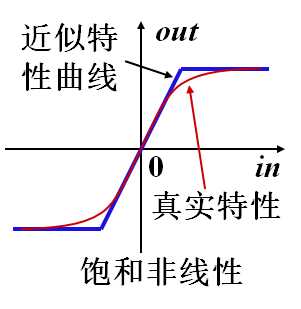
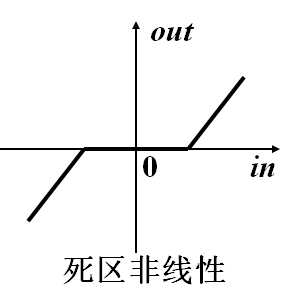
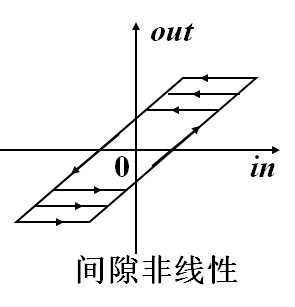
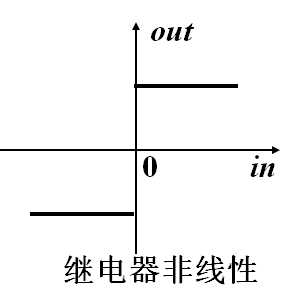
以上均为非线性,都存在不连续点,只能采取分段线性方法或者非线性问题处理方法。
以上是关于控制系统数学模型的线性化的主要内容,如果未能解决你的问题,请参考以下文章