ARDUINO+MCP2515实现CAN通讯接收
Posted anandexuechengzhangzhilu
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ARDUINO+MCP2515实现CAN通讯接收相关的知识,希望对你有一定的参考价值。
我的学习过程有几个关键点;
1、MCP2515 CAN总线模块与ARDUINO UNO R3的接线方式;
2、程序set_mask_filter_recv的参数设置,mcp_can_dfs.h库文件设置;
3、MCP2515 CAN总线模块与mcp_can.cpp库文件的关联;
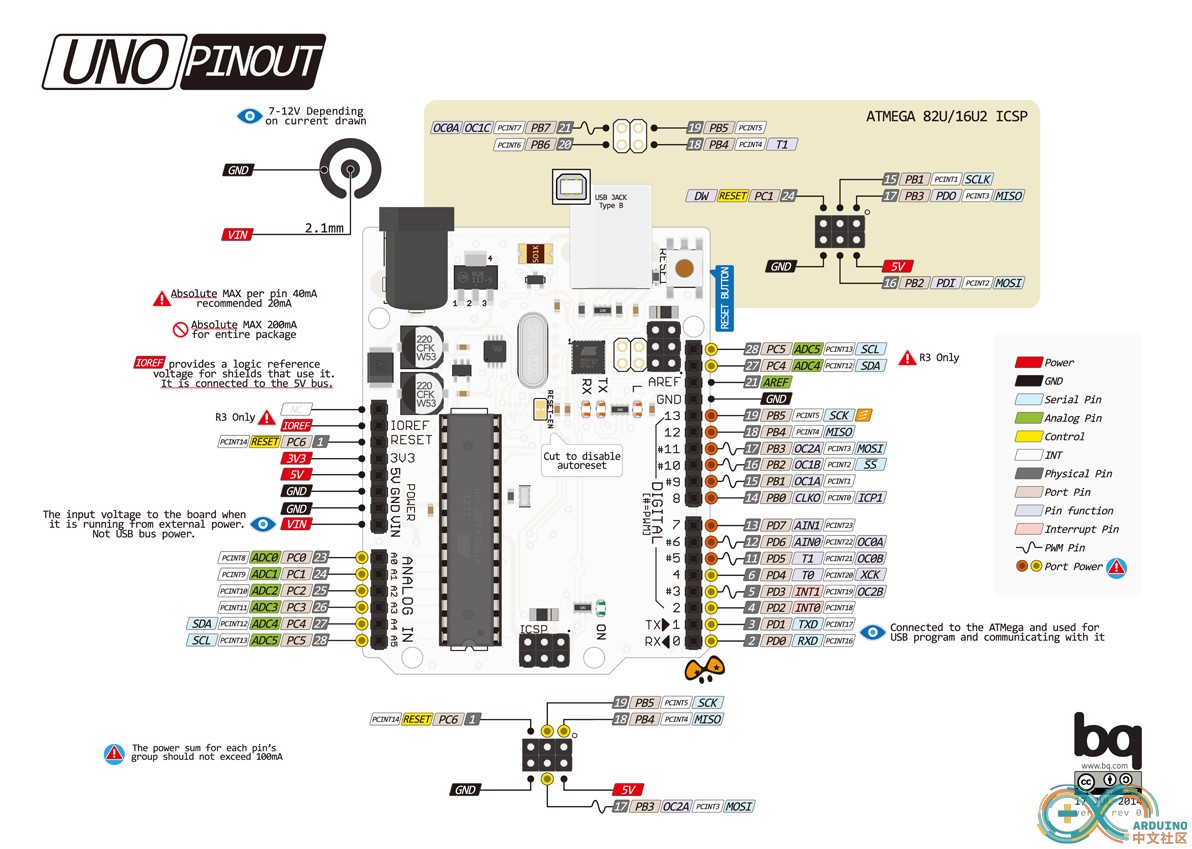
第一点看下面图片:
<ignore_js_op>
<ignore_js_op>
首先在ARDUINO UNO R3找到SCK,Mios,MOIS,INT0,5V,GND,连接到MCP2515 CAN总线模块的对应接口;
CANH,CANL接到can总线上;
CS管脚接到arduino的9号管脚,单独拿出来讲,是因为此管脚位置可以在程序里面设置,设置如下;
const int SPI_CS_PIN = 9;
INT管脚接到arduino的2号管脚,单独拿出来讲,是因为此管脚位置可以在程序里面设置,设置如下;
attachInterrupt(0,MCP2515_ISR, FALLING); //0代表INT01代表INT1,看ARDUINO UNO R3管脚定义。
延伸一下,关于不同版本的ARDUINO的INT管脚位置,
参考如下链接
Arduino——外部中断的使用
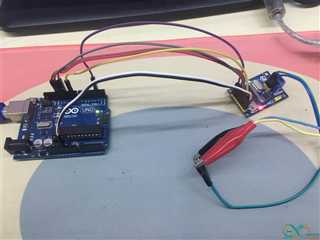
接线图如下
第二点,上代码和库文件
在GITHUB里面搜索Seeed-Studio/CAN_BUS_Shield得到
GITHUB里面的MCP_CAN库文件
https://github.com/Seeed-Studio/CAN_BUS_Shield
程序set_mask_filter_recv代码(我做了些修改)如下
- #include <SPI.h>
- #include "mcp_can.h"
- // the cs pin of the version after v1.1 is default to D9
- // v0.9b and v1.0 is default D10
- const int SPI_CS_PIN = 9;
- MCP_CAN CAN(SPI_CS_PIN); // Set CS pin
- unsigned char flagRecv = 0;
- unsigned char len = 0;
- unsigned char buf[8];
- char str[20];
- void setup()
- {
- Serial.begin(115200);
- while (CAN_OK != CAN.begin(CAN_1000KBPS)) // init can bus : baudrate = 500k
- {
- Serial.println("CAN BUS Shield init fail");
- Serial.println(" Init CAN BUS Shield again");
- delay(100);
- }
- Serial.println("CAN BUS Shield init ok!");
- attachInterrupt(0,MCP2515_ISR, FALLING); // start interrupt
- /*
- * set mask, 0x代表16进制,0b代表2进制,屏蔽器的0xf代表0b1111
- */
- // 屏蔽器序号 是否接受扩展桢 0 不接受 1:接受 32位屏蔽器 f 位置必须匹配 0 不关心
- CAN.init_Mask(0, 1, 0xffff00ff);
- CAN.init_Mask(1, 1, 0xffff00ff);
- Serial.println("MASK IS OK");
- /*
- * set filter,以上MASK函数0xffff00ff中,can总线内 帧 ID中f位置必须符合Filt设置的数值,才会将帧的DATA存入缓存器
- */
- // 过滤器序号 是否接受扩展桢 0 不接受 1:接受 32位过滤器:屏蔽器为1的位必须匹配 0 不关心
- CAN.init_Filt(0, 1, 0x14fa0003); // mcp2515 0号过滤器
- CAN.init_Filt(1, 1, 0x14fa0004); // mcp2515 1号过滤器
- CAN.init_Filt(2, 1, 0x14fa0005); // mcp2515 2号过滤器
- CAN.init_Filt(3, 1, 0x14fa0010); // mcp2515 3号过滤器
- CAN.init_Filt(4, 1, 0x14fa0050); // mcp2515 4号过滤器
- CAN.init_Filt(5, 1, 0x14fa0051); // mcp2515 5号过滤器
- Serial.println("FILT OK");
- }
- void MCP2515_ISR()
- {
- flagRecv = 1;
- }
- void loop()
- {
- if(flagRecv) // check if get data
- {
- flagRecv = 0; // clear flag
- CAN.readMsgBuf(&len, buf); // read data, len: data length, buf: data buf
- Serial.println("READ MESSAGE OK");
- CAN.printMessage();
- }
- }
- /*********************************************************************************************************
- END FILE
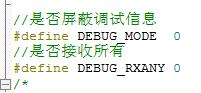
此程序是屏蔽接收can信息,所以需要打开mcp_can_dfs.h找到下面两行代码置0
<ignore_js_op>
整个程序的思路就是如下:
1、调用<SPI.h>, "mcp_can.h"两个库文件,至于怎么添加库文件自己找教程;
2、设置CS管脚为9号IO管脚
3、预设flagRecv=0,len=0,buf=[8], str[20],意思是flagRecv,len默认状态为0,,buf为8组8个字节的数据组,str不知道是什么,有知道的高手请告知,个人臆断欢迎指正。
4、SETUP()函数,设置串口通讯码率为115200,can通讯波特率为1000KBPS(这里做一个记号)
5、设置中断函数attachInterrupt(0,MCP2515_ISR, FALLING),意思是:中断INT接2号IO管脚,自定义中断函数名为MCP2515_ISR,使用下降沿触发中断。
6、 CAN.init_Mask(0, 1, 0xffff00ff)设置0号屏蔽器,可以接收扩展桢,帧的ID符合0xffff00ff这个格式, 32位屏蔽器 f 位置必须匹配 0 不关心,f相当于开关来启动下面的过滤器。
7、 CAN.init_Filt(0,1,0x14fa0003)设置0号过滤器,可以接收扩展桢,ID符合0x14fa0003的扩展桢都可进入缓存器。
8、设置中断函数 MCP2515_ISR的状态标志,flagRecv=1。
9、循环函数loop(),每当一个下降沿信号进来,flagRecv置0,CAN.readMsgBuf(&len, buf)读取缓存器内的信息,CAN.printMessage()can打印出信息。
以上是一个菜鸟的理解,欢迎大神门指正。
=========分割线=====================分割线===================分割线====================
关于怎么理解程序中各个函数的意思和使用方法——————没什么特别的方法,自己分别打开【mcp_can.cpp】【mcp_can.h】【mcp_can_dfs.h】【MCP2515中文详解.pdf】,一个个不懂的翻译和搜索学习。
例如:CAN.init_Mask() CAN.readMsgBuf() CAN.printMessage() 这几个函数在哪里定义的,内容是怎样的都可以在上面的文件找到。
=========分割线=====================分割线===================分割线====================
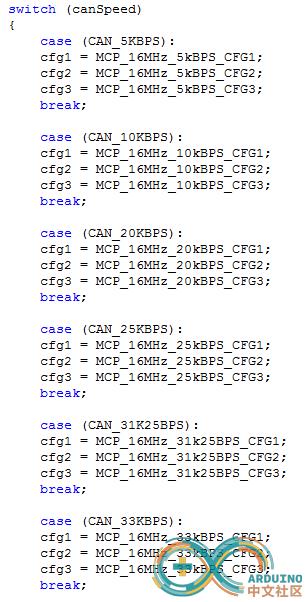
上面有一个记号的地方需要重点说明的
如果你的can总线波特率是500KBPS
CAN.begin(CAN_1000KBPS) can通讯波特率设置为1000KBPS
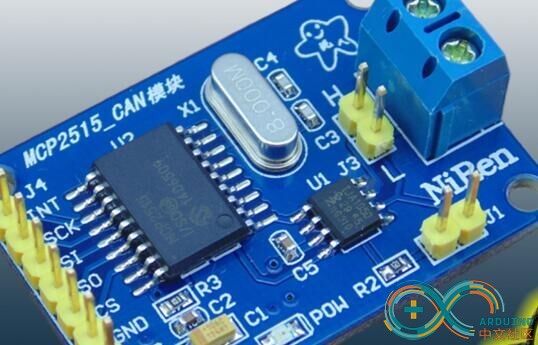
差了1倍,原因是mcp_can.cpp的代码是以16MHz晶振的CAN总线模块编写的,而我们使用的MCP2515 CAN总线模块的晶振是8M的。所以代码里面要把CAN.begin()设高一倍。
<ignore_js_op>
看上面的模块照片,晶振上打字是8.000M。
=========分割线=====================分割线===================分割线====================
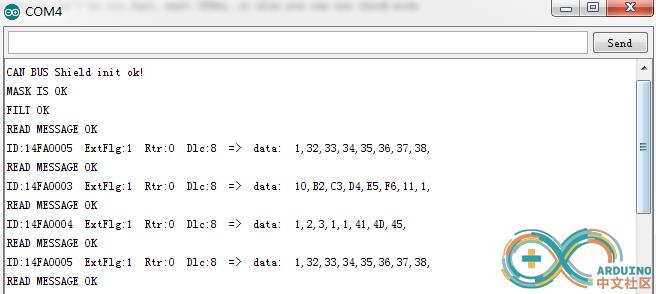
代码写好了需要自己搭建测试台架,一个can发送装置提供CAN信号。
下面的照片是我在串口接收到的信息,显示了ID和DATA
<ignore_js_op>
以上是关于ARDUINO+MCP2515实现CAN通讯接收的主要内容,如果未能解决你的问题,请参考以下文章