ROS系统玩转自主移动机器人-- 开源机器人结构介绍
Posted shawn0102
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了ROS系统玩转自主移动机器人-- 开源机器人结构介绍相关的知识,希望对你有一定的参考价值。
本机器人机械结构设计相关的所有设计文件下载地址为:传送门
其中包含:三维造型设计文件(所有零件+装配效果)(tips:基于Solidworks 2015 绘制)
非标加工的零件图纸(PDF格式+Dwg格式)
本开源机器人项目首要目的是让感兴趣的朋友花很少的钱就能玩转功能简单的机器人,了解机器人的搭建过程并学习ROS系统(如机器人SLAM),因此结构设计的目标和原则很明确:设计一款轮式机器人,满足功能要求的基础上尽量做到成本低廉,总之花小钱多办事。
例如,最终笔者在非标准金属加工件的的总投入是115元RMB(包含邮费,价格很低了吧 ^_^ ,当然这不包括购买的标准件,后面具体讲),这首先就是因为在设计之初就考虑零部件加工工艺及成本,其次说明现在机加工行业竞争真的很激烈。。。(实体加工企业日子难熬。。。)
一、开源机器人结构设计
首先看一下这个开源机器人在机械结构上共分为13个部分,它们的分布和位置关系如图1所示。
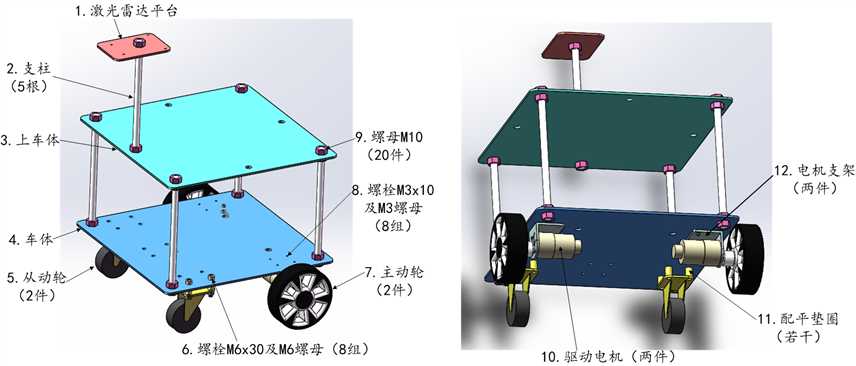
图1 机械构成
每个组成部分的功能基本上都能在图1中看出来,为了说明更详细,列出下面的表格,对他们的详细功能进行细致的说明。
| 序号 | 名称 | 功能 | 数量 | 是否机加 | 备注 |
| 1 | 激光雷达平台 | 固定激光雷达 | 1 | 是 | |
| 2 | 支柱 | 支撑和链接车体4及上车体3 | 5 | 否 | |
| 3 | 上车体 | 机器人上层平台用于放置激光雷达平台1及电脑(或ARM开发板) | 1 | 是 | |
| 4 | 车体 | 机器人下层平台用于链接主、从动轮及放置嵌入式硬件、电池等 | 1 | 是 | |
| 5 | 从动轮 | 万向从动轮 | 2 | 否 | |
| 6 | 螺栓M6x30及M6螺母 | 将从动轮5固定到车体4上 | 8(组) | 否 | 内六角圆柱头螺钉 |
| 7 | 主动轮 | 驱动机器人 | 2 | 否 | |
| 8 | 螺栓M3x10及M3螺母 | 将主动轮7固定到车体4上 | 8(组) | 否 | 内六角圆柱头螺钉 |
| 9 | 螺母M10 | 将支柱2连接到车体4、上车体3以及激光雷达平台1上 | 20 | 否 | |
| 10 | 驱动电机 | 驱动主动轮7 | 2 | 否 | |
| 11 | 配平垫圈M6 | 配平从动轮5,使得主动轮7和从动轮5支撑起来的车体4水平 | 若干 | 否 | |
| 12 | 电机支架 | 将驱动电机10固定到车体4上 | 2 | 否 |
从上表中可以看出,6、8、9、11为标准件,直接按照规格购买即可。
未完待续。。。
以上是关于ROS系统玩转自主移动机器人-- 开源机器人结构介绍的主要内容,如果未能解决你的问题,请参考以下文章
ROS仿真笔记之——基于rrt_exploration的单个机器人自主探索建图