数值优化
Posted mathematic-offering
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了数值优化相关的知识,希望对你有一定的参考价值。
线搜索方法
线搜索方法的基本过程都是在每一次迭代中先计算出一个优化方向(p_k),再在这个方向上对目标函数做一维优化,即选取合适的(alpha_k),使(x_{k+1}=x_k+alpha p_k)达到优化目的。一般来说,选取(p_k=-B_k^{--1} abla f_k),其中(B_k)是一个对称正定矩阵,(B_k)的选取有多种选择,比如在牛顿法中,(B_k)就是Hessian,而在逆牛顿法中,(B_k)是Hessian的近似。由于(p_k=-B_k^{--1} abla f_k),(B_k)正定,可以知道(p_k)确实是下降方向。
搜索步长
定义[Phi(alpha)=f(x_k+alpha p_k) quad alpha >0]步长选取就是该函数的局部最优化问题,对此不需要太高的准确度,不能在这个问题上花费很多时间,所以只需要给出一个差不多的解就可以了。步长搜索过程分为两个阶段--bracketing-phase和bisection(or interpolation)-phase,前者找到一个包含期望步长的区间,后者在这个区间里面计算出一个好的步长。为此,先给搜索步长施加几个要求,首先就是搜索步长需要使得函数下降,但这显然不够,于是还有下面的条件。
Wolfe Condition
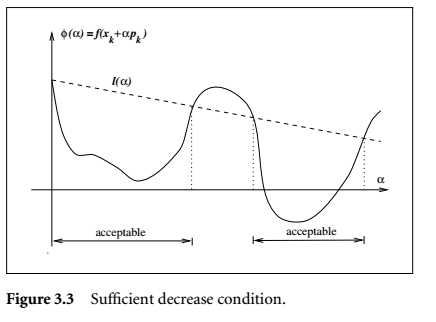
充分下降条件
[f(x_k+alpha p_k) leq f(x_k)+c_1alpha
abla f_k^T p_k]
示意图:
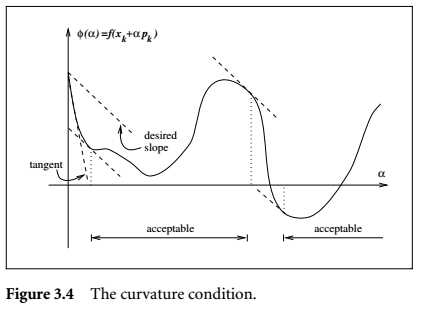
curvature condition
[
abla f (x_k+alpha_k p_k)^Tp_k geq c_2
abla f_k^T p_k quad 0 < c_1<c_2<1]
示意图:
两个条件合起来称为Wolfe-condition,在实际应用中,(c_1)通常取得比较小,比如(10^{-4})。(c_2)在牛顿和拟牛顿方法中通常取0.9,在共轭梯度法中通常取0.1。
将curvature condition改为[|
abla f (x_k+alpha_k p_k)^Tp_k| leq c_2|
abla f_k^T p_k|]得到的条件称为strong Wolfe condition
在Wolfe condition和strong Wolfe condition下,满足条件的步长是存在的:

The Goldstein condition
Goldstein condition和Wolfe condition出发点相同,都是在保证充足的下降情况下,又避免搜索步长过小。[f(x_k)+(1-c)alpha_k abla f_k^T p_k leq f(x_k+alpha_k p_k)leq f(x_k)+calpha_k abla f_k^T p_kquad 0<c<frac{1}{2}]Goldstein condition相对于Wolfe condition的缺点是,它的第一个不等式有可能排除了所有极小点。
backtracking
即使只对步长施加充分下降条件,只要适当选取步长,也是可以的,这里就要用到称为backtracking的方法。
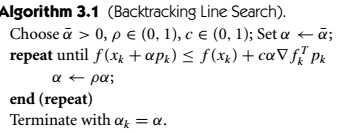
在这个过程中,初始步长在牛顿和拟牛顿方法中取为1,在其他方法中可取为不同的值。
## 收敛理论
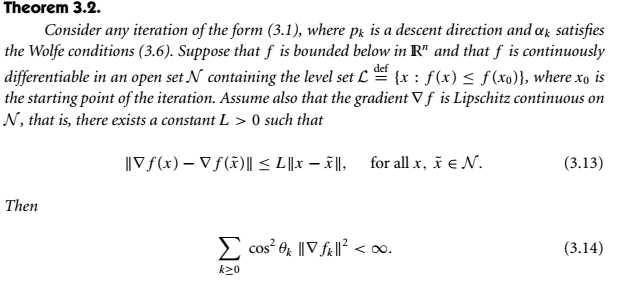
其中( heta_k)是(
abla f_k)与(p_k)的夹角。将这个定理中的wolfe condition换为goldstein 或strong wolfe定理任然成立。
最速下降法

可知最速下降法收敛速度是线性的
牛顿法
以上是关于数值优化的主要内容,如果未能解决你的问题,请参考以下文章