STM32F429开发板用户手册第34章 STM32F429的SPI总线应用之驱动DAC8501(双路输出,16bit分辨率,0-5V)
Posted armfly
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了STM32F429开发板用户手册第34章 STM32F429的SPI总线应用之驱动DAC8501(双路输出,16bit分辨率,0-5V)相关的知识,希望对你有一定的参考价值。
最新教程下载:http://www.armbbs.cn/forum.php?mod=viewthread&tid=93255
第34章 STM32F429的SPI总线应用之驱动DAC8501(双路输出,16bit分辨率,0-5V)
本章节为大家讲解标准SPI接线方式驱动模数转换器DAC8501。
34.1 初学者重要提示
34.2 DAC结构分类和技术术语
34.3 DAC8501硬件设计
34.4 DAC8501关键知识点整理(重要)
34.5 DAC8501驱动设计
34.6 SPI总线板级支持包(bsp_spi_bus.c)
34.7 DAC8501支持包中断方式(bsp_spi_dac8501.c)
34.8 DAC8501驱动移植和使用
34.9 实验例程设计框架
34.10 实验例程说明(MDK)
34.11 实验例程说明(IAR)
34.12 总结
34.1 初学者重要提示
- 学习本章节前,务必优先学习第31章。
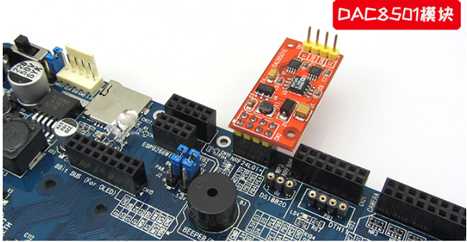
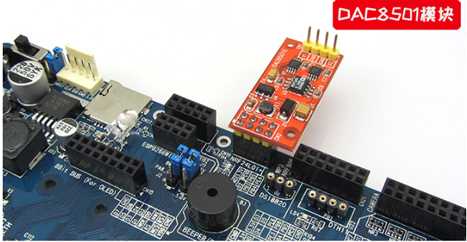
- DAC8501模块上带了两片8501,每片是单通道DAC,带片上输出缓冲运放,轨到轨输出,16bit分辨率,支持30MHz的SPI时钟速度。
- 我们的H7板子配套了SPI + DMA方式控制DAC8501,而F4系列不方便实现,确切的说是可以用DMA方式,但是不方便控制写入速度,需要借助定时器中断进行更新,实用价值不是很大。
- DAC8501数据手册,模块原理图和接线图都已经放到本章教程配置例子的Doc文件里。
- 文件bsp_spi_bus.c文件公共的总线驱动文件,支持串行FLASH、TSC2046、VS1053、AD7705、ADS1256等SPI设备的配置。
34.2 DAC结构分类和技术术语
在本教程的第33章进行了详细说明。
34.3 DAC8501硬件设计
DAC的原理图下载:
http://www.armbbs.cn/forum.php?mod=viewthread&tid=97262 。
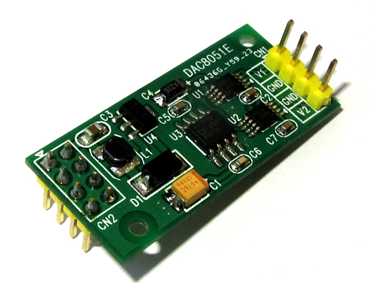
34.3.1 DAC8501模块规格
- 产品规格:
1、供电电压: 2.7 - 5.5V【3.3V供电时,输出电压也可以到5V】。
2、通道数: 2路 (通过2片DAC8501E实现)。
3、输出电压范围 : 0 - 5V【零位 < 0.020V, 满位 > 4.970V】。
4、分辨率: 16位。
5、功耗 : 小于10mA。
6、MCU接口 :高速 SPI (30M) 支持 3.3V和5V单片机。
7、DAC输出模拟带宽:350KHz。
8、DAC输出响应: 10uS 到 0.003% FSR。
- 产品特点:
1、输出和供电电压无关;模块内带升压电路和5V基准。
2、自适应单片机的电平(2.7 - 5V 均可以)。
3、输出电压轨到轨,最高电压可以到 4.970V 以上。
- 产品效果:
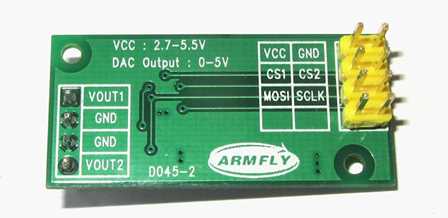
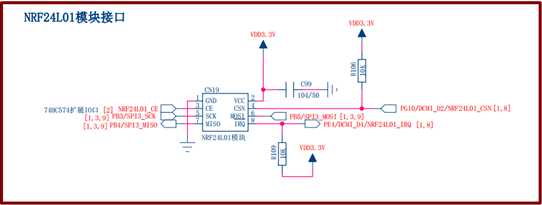
34.3.2 DAC8501硬件接口
V6板子上DAC8501模块的插座的原理图如下(NRF24L01,AD9833,DAC8563和TM7705都是用的而这个插座):
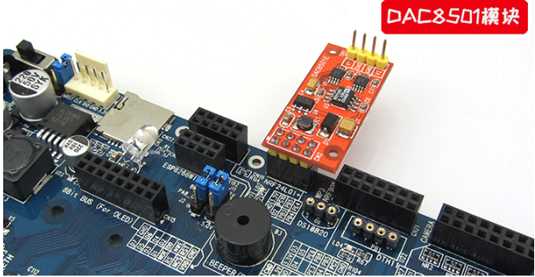
实际对应开发的位置如下:
34.4 DAC8501关键知识点整理(重要)
驱动DAC8501需要对下面这些知识点有个认识。
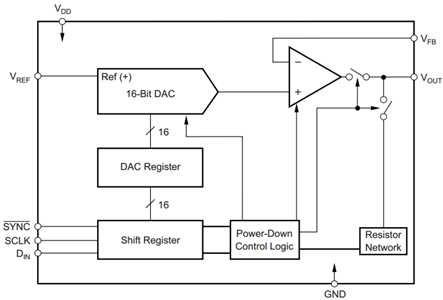
34.4.1 DAC8501基础信息
- 单通道DAC,带片上输出缓冲运放,轨到轨输出,16bit分辨率,支持30MHz的SPI时钟速度。
- 模拟输出带宽350KHz。
- 供电范围2.7V到5.5V。
- 具有低功耗特性。
- 上电复位输出0V。
34.4.2 DAC8501每个引脚的作用
DAC8501的封装形式:
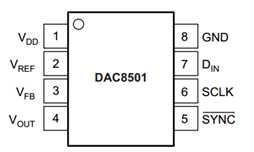
- Vdd
供电范围2.7-5.5V。
- Vref
稳压基准输入。
- Vfb
输出运放的反馈。
- Vout
模拟输出电压,输出运放具有轨到轨特性。
- SYNC (片选)
低电平有效,当SYNC变为低电平时,它使能输入移位寄存器,并且数据采样在随后的时钟下降沿。 DAC输出在第24个时钟下降沿之后更新。 如果SYNC在第23个时钟沿之前变高,SYNC的上升沿将充当中断,并且DAC8501将忽略写序列。
- SCLK
时钟输入端,支持30MHz。
- Din
串行时钟输入,每个时钟下降沿将数据写到的24bit的输入移位寄存器。
- GND
接地端。
34.4.3 DAC8501输出电压计算公式
DAC8501的计算公式如下:
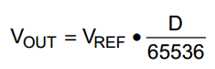
- D
配置DAC8501数据输出寄存器的数值,范围0 到2^16 – 1,即0到65535。
- VREF
使用外部参考电压,由VREFIN引脚的输入决定。
- Vout
输出电压。
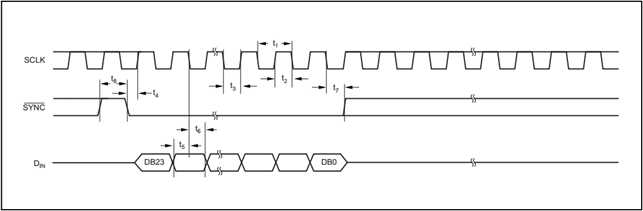
34.4.4 DAC8501时序图
DAC8501的时序图如下:
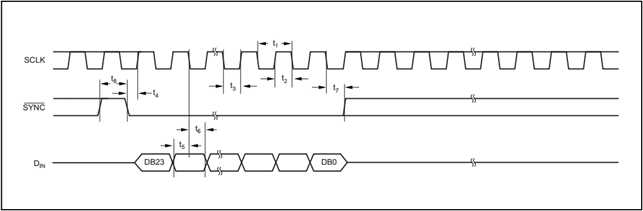
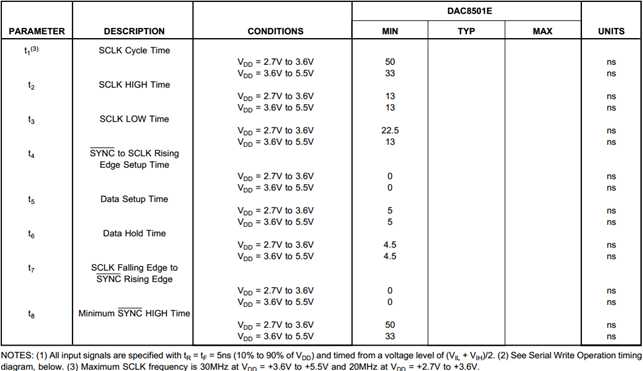
这个时序里面有三个参数尤其重要,后面时序配置要用到(对于F4系列主要是第1个参数,H7系列这三个都要用的)。
- f(1)
供电2.7到3.6V时,最高时钟20MHz。
供电3.6到5.5V时,最高时钟30MHz。
- t(4)
SYNC低电平有效到SCLK第1个上降沿信号的时间没有最小值限制,可以为0。
- t(8)
每传输24bit数据后,SYNC要保持一段时间的高电平。
供电2.7到3.6V时,最小要求50ns。
供电3.6到5.5V时,最小要求33ns。
34.4.5 DAC8501寄存器配置
DAC8501的寄存器配置是24bit格式:

控制DAC8501每次要传输24bit数据,高8bit控制位 + 16bit数据位。
控制位的PD1和PD0定义如下:
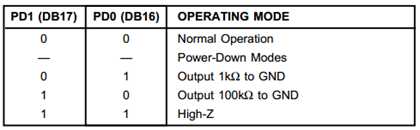
PD1 PD0 决定4种工作模式:
0 0 ---> 正常工作模式
0 1 ---> 输出接1K欧到GND
1 0 ---> 输出100K欧到GND
1 1 ---> 输出高阻
34.5 DAC8501驱动设计(中断更新方式)
DAC8501的程序驱动框架设计如下:
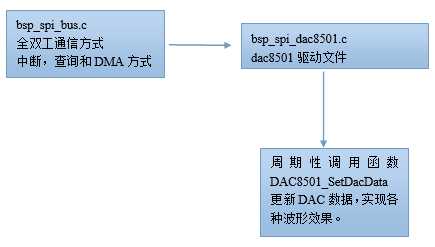
有了这个框图,程序设计就比较好理解了。
34.5.1 第1步:SPI总线配置
spi总线配置通过如下两个函数实现:
/* ********************************************************************************************************* * 函 数 名: bsp_InitSPIBus * 功能说明: 配置SPI总线。 * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_InitSPIBus(void) { g_spi_busy = 0; bsp_InitSPIParam(SPI_BAUDRATEPRESCALER_8, SPI_PHASE_1EDGE, SPI_POLARITY_LOW); } /* ********************************************************************************************************* * 函 数 名: bsp_InitSPIParam * 功能说明: 配置SPI总线参数,时钟分频,时钟相位和时钟极性。 * 形 参: _BaudRatePrescaler SPI总线时钟分频设置,支持的参数如下: * SPI_BAUDRATEPRESCALER_2 2分频 * SPI_BAUDRATEPRESCALER_4 4分频 * SPI_BAUDRATEPRESCALER_8 8分频 * SPI_BAUDRATEPRESCALER_16 16分频 * SPI_BAUDRATEPRESCALER_32 32分频 * SPI_BAUDRATEPRESCALER_64 64分频 * SPI_BAUDRATEPRESCALER_128 128分频 * SPI_BAUDRATEPRESCALER_256 256分频 * * _CLKPhase 时钟相位,支持的参数如下: * SPI_PHASE_1EDGE SCK引脚的第1个边沿捕获传输的第1个数据 * SPI_PHASE_2EDGE SCK引脚的第2个边沿捕获传输的第1个数据 * * _CLKPolarity 时钟极性,支持的参数如下: * SPI_POLARITY_LOW SCK引脚在空闲状态处于低电平 * SPI_POLARITY_HIGH SCK引脚在空闲状态处于高电平 * * 返 回 值: 无 ********************************************************************************************************* */ void bsp_InitSPIParam(uint32_t _BaudRatePrescaler, uint32_t _CLKPhase, uint32_t _CLKPolarity) { /* 提高执行效率,只有在SPI硬件参数发生变化时,才执行HAL_Init */ if (s_BaudRatePrescaler == _BaudRatePrescaler && s_CLKPhase == _CLKPhase && s_CLKPolarity == _CLKPolarity) { return; } s_BaudRatePrescaler = _BaudRatePrescaler; s_CLKPhase = _CLKPhase; s_CLKPolarity = _CLKPolarity; /* 设置SPI参数 */ hspi.Instance = SPIx; /* 例化SPI */ hspi.Init.BaudRatePrescaler = _BaudRatePrescaler; /* 设置波特率 */ hspi.Init.Direction = SPI_DIRECTION_2LINES; /* 全双工 */ hspi.Init.CLKPhase = _CLKPhase; /* 配置时钟相位 */ hspi.Init.CLKPolarity = _CLKPolarity; /* 配置时钟极性 */ hspi.Init.DataSize = SPI_DATASIZE_8BIT; /* 设置数据宽度 */ hspi.Init.FirstBit = SPI_FIRSTBIT_MSB; /* 数据传输先传高位 */ hspi.Init.TIMode = SPI_TIMODE_DISABLE; /* 禁止TI模式 */ hspi.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE; /* 禁止CRC */ hspi.Init.CRCPolynomial = 7; /* 禁止CRC后,此位无效 */ hspi.Init.NSS = SPI_NSS_SOFT; /* 使用软件方式管理片选引脚 */ hspi.Init.Mode = SPI_MODE_MASTER; /* SPI工作在主控模式 */ /* 复位SPI */ if(HAL_SPI_DeInit(&hspi) != HAL_OK) { Error_Handler(__FILE__, __LINE__); } if (HAL_SPI_Init(&hspi) != HAL_OK) { Error_Handler(__FILE__, __LINE__); } }
关于这两个函数有以下两点要做个说明:
- 函数bsp_InitSPIBus里面的配置是个初始设置。实际驱动芯片时,会通过函数bsp_InitSPIParam做再配置。
- 函数bsp_InitSPIParam提供了时钟分频,时钟相位和时钟极性配置。驱动不同外设芯片时,基本上调整这三个参数就够。当SPI接口上接了多个不同类型的芯片时,通过此函数可以方便的切换配置。
34.5.2 第2步:SPI总线的查询,中断和DMA方式设置
注:推荐使用查询方式。
SPI驱动的查询,中断和DMA方式主要通过函数bsp_spiTransfer实现数据传输:
/* ********************************************************************************************************* * 选择DMA,中断或者查询方式 ********************************************************************************************************* */ //#define USE_SPI_DMA /* DMA方式 */ //#define USE_SPI_INT /* 中断方式 */ #define USE_SPI_POLL /* 查询方式 */ uint8_t g_spiTxBuf[SPI_BUFFER_SIZE]; uint8_t g_spiRxBuf[SPI_BUFFER_SIZE]; /* ********************************************************************************************************* * 函 数 名: bsp_spiTransfer * 功能说明: 启动数据传输 * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_spiTransfer(void) { if (g_spiLen > SPI_BUFFER_SIZE) { return; } /* DMA方式传输 */ #ifdef USE_SPI_DMA wTransferState = TRANSFER_WAIT; if(HAL_SPI_TransmitReceive_DMA(&hspi, (uint8_t*)g_spiTxBuf, (uint8_t *)g_spiRxBuf, g_spiLen) != HAL_OK) { Error_Handler(__FILE__, __LINE__); } while (wTransferState == TRANSFER_WAIT) { ; } #endif /* 中断方式传输 */ #ifdef USE_SPI_INT wTransferState = TRANSFER_WAIT; if(HAL_SPI_TransmitReceive_IT(&hspi, (uint8_t*)g_spiTxBuf, (uint8_t *)g_spiRxBuf, g_spiLen) != HAL_OK) { Error_Handler(__FILE__, __LINE__); } while (wTransferState == TRANSFER_WAIT) { ; } #endif /* 查询方式传输 */ #ifdef USE_SPI_POLL if(HAL_SPI_TransmitReceive(&hspi, (uint8_t*)g_spiTxBuf, (uint8_t *)g_spiRxBuf, g_spiLen, 1000000) != HAL_OK) { Error_Handler(__FILE__, __LINE__); } #endif }
通过开头宏定义可以方便的切换中断,查询和DMA方式。
34.5.3 第3步:DAC8501的时钟极性和时钟相位配置
首先回忆下STM32F4支持的4种时序配置。
- 当CPOL = 1, CPHA = 1时
SCK引脚在空闲状态处于高电平,SCK引脚的第2个边沿捕获传输的第1个数据。
- 当CPOL = 0, CPHA = 1时
SCK引脚在空闲状态处于低电平,SCK引脚的第2个边沿捕获传输的第1个数据。
- 当CPOL = 1, CPHA = 0时
SCK引脚在空闲状态处于高电平,SCK引脚的第1个边沿捕获传输的第1个数据。
- 当CPOL = 0 ,CPHA= 0时
SCK引脚在空闲状态处于低电平,SCK引脚的第1个边沿捕获传输的第1个数据。
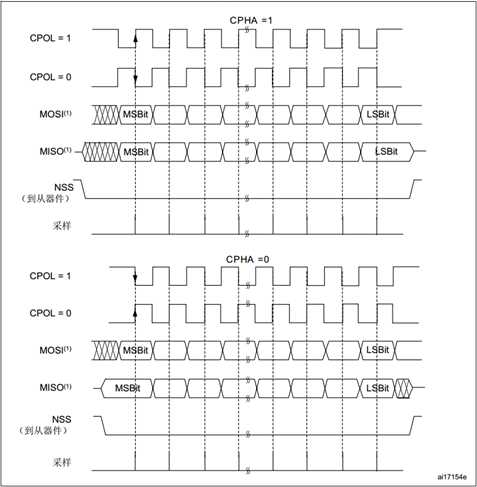
有了F4支持的时序配置,再来看下DAC8501的时序图:
首先DAC8501是下降升沿做数据采集,所以STM32F4的可选的配置就是:
CHOL = 0, CPHA = 1
CHOL = 1, CPHA = 0
对于这两种情况的主要区别是空闲状态下SCLK时钟选择高电平还是低电平,根据上面的时序图和DAC8501的数据手册,两种情况下都可以正常运行。经过实际测试,STM32F4使用这两个配置确实都可以正常运行。程序里面默认是选择CHOL = 0, CPHA = 1。
34.5.4 第4步:单SPI接口管理多个SPI设备的切换机制
单SPI接口管理多个SPI设备最麻烦的地方是不同设备的时钟分配,时钟极性和时钟相位并不相同。对此的解决解决办法是在片选阶段配置切换,比如DAC8501的片选:
/* ********************************************************************************************************* * 函 数 名: DAC8501_SetCS1 * 功能说明: DAC8501 片选控制函数 * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ void DAC8501_SetCS1(uint8_t _Level) { if (_Level == 0) { bsp_SpiBusEnter(); /* 占用SPI总线 */ bsp_InitSPIParam(SPI_BAUDRATEPRESCALER_4, SPI_PHASE_2EDGE, SPI_POLARITY_LOW); CS1_0(); } else { CS1_1(); bsp_SpiBusExit(); /* 释放SPI总线 */ } } /* ********************************************************************************************************* * 函 数 名: DAC8501_SetCS2(0) * 功能说明: 设置CS2。 用于运行中SPI共享。 * 形 参: 无 返 回 值: 无 ********************************************************************************************************* */ void DAC8501_SetCS2(uint8_t _level) { if (_level == 0) { bsp_SpiBusEnter(); /* 占用SPI总线 */ bsp_InitSPIParam(SPI_BAUDRATEPRESCALER_4, SPI_PHASE_2EDGE, SPI_POLARITY_LOW); CS2_0(); } else { CS2_1(); bsp_SpiBusExit(); /* 释放SPI总线 */ } }
通过这种方式就有效的解决了单SPI接口管理多设备的问题。因为给每个设备都配了一个独立的片选引脚,这样就可以为每个设备都配置这么一个片选配置。
但是频繁配置也比较繁琐,所以函数bsp_InitSPIParam里面做了特别处理。当前配置与之前配置相同的情况下无需重复配置。
34.5.5 第5步:DAC8501的数据更新
DAC8501的双通道数据更新通过下面的函数实现:
/* ********************************************************************************************************* * 函 数 名: DAC8501_SetDacData * 功能说明: 设置DAC数据 * 形 参: _ch, 通道, * _data : 数据 * 返 回 值: 无 ********************************************************************************************************* */ void DAC8501_SetDacData(uint8_t _ch, uint16_t _dac) { uint32_t data; /* DAC8501.pdf page 12 有24bit定义 DB24:18 = xxxxx 保留 DB17: PD1 DB16: PD0 DB15:0 16位数据 其中 PD1 PD0 决定4种工作模式 0 0 ---> 正常工作模式 0 1 ---> 输出接1K欧到GND 1 0 ---> 输出100K欧到GND 1 1 ---> 输出高阻 */ data = _dac; /* PD1 PD0 = 00 正常模式 */ if (_ch == 0) { DAC8501_SetCS1(0); } else { DAC8501_SetCS2(0); } /* DAC8501 SCLK时钟高达30M,因此可以不延迟 */ g_spiLen = 0; g_spiTxBuf[g_spiLen++] = (data >> 16); g_spiTxBuf[g_spiLen++] = (data >> 8); g_spiTxBuf[g_spiLen++] = (data); bsp_spiTransfer(); if (_ch == 0) { DAC8501_SetCS1(1); } else { DAC8501_SetCS2(1); } }
函数实现比较简单,每次更新发送24bit数据即可。
34.6 SPI总线板级支持包(bsp_spi_bus.c)
SPI总线驱动文件bsp_spi_bus.c主要实现了如下几个API供用户调用:
- bsp_InitSPIBus
- bsp_InitSPIParam
- bsp_spiTransfer
34.6.1 函数bsp_InitSPIBus
函数原型:
void bsp_InitSPIBus(void)
函数描述:
此函数主要用于SPI总线的初始化,在bsp.c文件调用一次即可。
34.6.2 函数bsp_InitSPIParam
函数原型:
void bsp_InitSPIParam(uint32_t _BaudRatePrescaler, uint32_t _CLKPhase, uint32_t _CLKPolarity)
函数描述:
此函数用于SPI总线的配置。
函数参数:
- 第1个参数SPI总线的分频设置,支持的参数如下:
SPI_BAUDRATEPRESCALER_2 2分频
SPI_BAUDRATEPRESCALER_4 4分频
SPI_BAUDRATEPRESCALER_8 8分频
SPI_BAUDRATEPRESCALER_16 16分频
SPI_BAUDRATEPRESCALER_32 32分频
SPI_BAUDRATEPRESCALER_64 64分频
SPI_BAUDRATEPRESCALER_128 128分频
SPI_BAUDRATEPRESCALER_256 256分频
- 第2个参数用于时钟相位配置,支持的参数如下:
SPI_PHASE_1EDGE SCK引脚的第1个边沿捕获传输的第1个数据
SPI_PHASE_2EDGE SCK引脚的第2个边沿捕获传输的第1个数据
- 第3个参数是时钟极性配置,支持的参数如下:
SPI_POLARITY_LOW SCK引脚在空闲状态处于低电平
SPI_POLARITY_HIGH SCK引脚在空闲状态处于高电平
34.6.3 函数bsp_spiTransfer
函数原型:
void bsp_spiTransfer(void)
函数描述:
此函数用于启动SPI数据传输,支持查询,中断和DMA方式传输。
34.7 DAC8501支持包中断方式(bsp_spi_dac8501.c)
DAC8501驱动文件bsp_spi_dac8501.c主要实现了如下几个API供用户调用:
- bsp_InitDAC8501
- DAC8501_SetCS1
- DAC8501_SetCS2
- DAC8501_SetDacData
- DAC8501_DacToVoltage
- DAC8501_VoltageToDac
34.7.1 函数bsp_InitDAC8501
函数原型:
void bsp_InitDAC8501(void)
函数描述:
主要用于DAC8501的初始化,调用前务必先调用函数bsp_InitSPIBus初始化SPI外设。
34.7.2 函数DAC8501_SetCS1
函数原型:
void DAC8501_SetCS1(uint8_t _Level)
函数描述:
此函数用于片选DAC8501模块上的第1片8501。
函数参数:
- 第1个参数为0表示选中,为1表示取消选中。
34.7.3 函数DAC8501_SetCS2
函数原型:
void DAC8501_SetCS2(uint8_t _Level)
函数描述:
此函数用于片选DAC8501模块上的第2片8501。
函数参数:
- 第1个参数为0表示选中,为1表示取消选中
34.7.4 函数DAC8501_SetDacData
函数原型:
void DAC8501_SetDacData(uint8_t _ch, uint16_t _dac)
函数描述:
此函数用于设置DAC输出,并立即更新。
函数参数:
- 第1个参数为0表示通道1,为1表示通道2。
- 第2个参数是DAC数值设置,范围0到65535,0对应最小电压值,65535对应最大电压值。
34.7.5 函数DAC8501_DacToVoltage
函数原型:
int32_t DAC8501_DacToVoltage(uint16_t _dac)
函数描述:
此函数用于将DAC值换算为电压值,单位0.1mV。
函数参数:
- 第1个参数DAC数值,范围0到65535。
- 返回值,返回电压值,单位0.1mV。
34.7.6 函数DAC8501_VoltageToDac
函数原型:
uint32_t DAC8501_VoltageToDac(int32_t _volt)
函数描述:
此函数用于将电压值转换为DAC值。
函数参数:
- 第1个参数是电压值,范围0到50000,单位0.1mV。
- 返回值,返回DAC值。
34.8 DAC8501驱动移植和使用
DAC8501移植步骤如下:
- 第1步:复制bsp_spi_bus.c,bsp_spi_bus.h,bsp_spi_dac8501.c,bsp_spi_dac8501.h到自己的工程目录,并添加到工程里面。
- 第2步:根据使用的第几个SPI,SPI时钟,SPI引脚和DMA通道等,修改bsp_spi_bus.c文件开头的宏定义
/* ********************************************************************************************************* * 时钟,引脚,DMA,中断等宏定义 ********************************************************************************************************* */ #define SPIx SPI1 #define SPIx_CLK_ENABLE() __HAL_RCC_SPI1_CLK_ENABLE() #define DMAx_CLK_ENABLE() __HAL_RCC_DMA2_CLK_ENABLE() #define SPIx_FORCE_RESET() __HAL_RCC_SPI1_FORCE_RESET() #define SPIx_RELEASE_RESET() __HAL_RCC_SPI1_RELEASE_RESET() #define SPIx_SCK_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() #define SPIx_SCK_GPIO GPIOB #define SPIx_SCK_PIN GPIO_PIN_3 #define SPIx_SCK_AF GPIO_AF5_SPI1 #define SPIx_MISO_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() #define SPIx_MISO_GPIO GPIOB #define SPIx_MISO_PIN GPIO_PIN_4 #define SPIx_MISO_AF GPIO_AF5_SPI1 #define SPIx_MOSI_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() #define SPIx_MOSI_GPIO GPIOB #define SPIx_MOSI_PIN GPIO_PIN_5 #define SPIx_MOSI_AF GPIO_AF5_SPI1 #define SPIx_TX_DMA_CHANNEL DMA_CHANNEL_3 #define SPIx_TX_DMA_STREAM DMA2_Stream3 #define SPIx_RX_DMA_CHANNEL DMA_CHANNEL_3 #define SPIx_RX_DMA_STREAM DMA2_Stream0 #define SPIx_IRQn SPI1_IRQn #define SPIx_IRQHandler SPI1_IRQHandler #define SPIx_DMA_TX_IRQn DMA2_Stream3_IRQn #define SPIx_DMA_RX_IRQn DMA2_Stream0_IRQn #define SPIx_DMA_TX_IRQHandler DMA2_Stream3_IRQHandler #define SPIx_DMA_RX_IRQHandler DMA2_Stream0_IRQHandler
- 第3步:根据芯片支持的时钟速度,时钟相位和时钟极性配置函数DAC8501_SetCS1和DAC8501_SetCS2。
/* ********************************************************************************************************* * 函 数 名: DAC8501_SetCS1 * 功能说明: DAC8501 片选控制函数 * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ void DAC8501_SetCS1(uint8_t _Level) { if (_Level == 0) { bsp_SpiBusEnter(); /* 占用SPI总线 */ bsp_InitSPIParam(SPI_BAUDRATEPRESCALER_8, SPI_PHASE_2EDGE, SPI_POLARITY_LOW); CS1_0(); } else { CS1_1(); bsp_SpiBusExit(); /* 释放SPI总线 */ } } /* ********************************************************************************************************* * 函 数 名: DAC8501_SetCS2(0) * 功能说明: 设置CS2。 用于运行中SPI共享。 * 形 参: 无 返 回 值: 无 ********************************************************************************************************* */ void DAC8501_SetCS2(uint8_t _level) { if (_level == 0) { bsp_SpiBusEnter(); /* 占用SPI总线 */ bsp_InitSPIParam(SPI_BAUDRATEPRESCALER_8, SPI_PHASE_2EDGE, SPI_POLARITY_LOW); CS2_0(); } else { CS2_1(); bsp_SpiBusExit(); /* 释放SPI总线 */ } }
- 第4步:根据使用的片选引脚,修改bsp_spi_dac8501.c文件开头的宏定义。
#define CS1_CLK_ENABLE() __HAL_RCC_GPIOG_CLK_ENABLE() #define CS1_GPIO GPIOG #define CS1_PIN GPIO_PIN_10 #define CS1_1() CS1_GPIO->BSRR = CS1_PIN #define CS1_0() CS1_GPIO->BSRR = ((uint32_t)CS1_PIN << 16U) /* 特别注意,我们这里是用的扩展IO控制的 */ #define CS2_1() HC574_SetPin(NRF24L01_CE, 1); #define CS2_0() HC574_SetPin(NRF24L01_CE, 0);
- 第5步:初始化SPI。
/* 针对不同的应用程序,添加需要的底层驱动模块初始化函数 */ bsp_InitSPIBus(); /* 配置SPI总线 */ bsp_InitDAC8501(); /* 初始化配置DAC8501 */
- 第6步:DAC8501驱动主要用到HAL库的SPI驱动文件,简单省事些可以添加所有HAL库C源文件进来。
- 第7步:应用方法看本章节配套例子即可。
34.9 实验例程设计框架
通过程序设计框架,让大家先对配套例程有一个全面的认识,然后再理解细节,本次实验例程的设计框架如下:
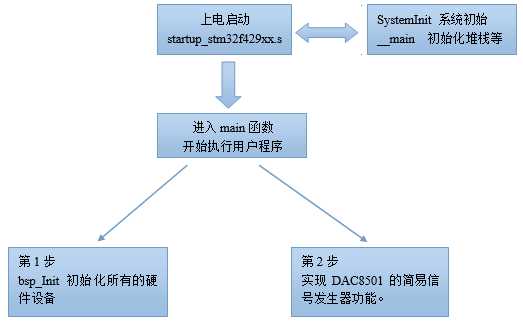
第1阶段,上电启动阶段:
- 这部分在第14章进行了详细说明。
第2阶段,进入main函数:
- 第1部分,硬件初始化,主要是HAL库,系统时钟,滴答定时器和LED。
- 第2部分,应用程序设计部分,实现DAC8501的简易信号发生器功能。
34.10 实验例程说明(MDK)
配套例子:
V6-015_DAC8501简易信号发生器(双路输出,16bit分辨率, 0-5V输出)
实验目的:
- 学习DAC8501的SPI DMA驱动方式实现。
实验内容:
- DAC8501模块上带了两片8501,每片是单通道DAC,片上输出缓冲运放,轨到轨输出,16bit分辨率,支持30MHz的SPI时钟速度。
- DAC8501供电电压2.7-5.5V,模拟输出带宽350KHz。
实验操作:
- 启动一个自动重装软件定时器,每100ms翻转一次LED2。
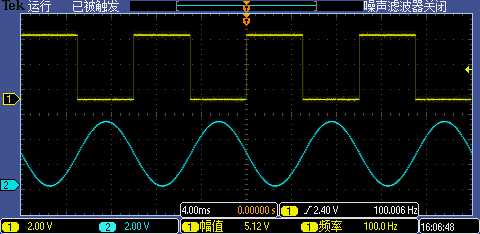
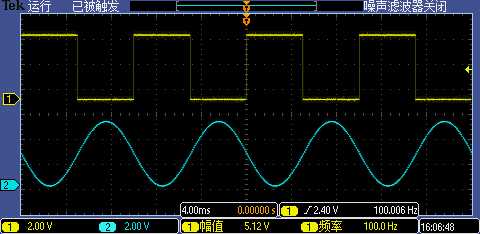
- K1键按下,双通道输出,通道1输出方波,通道2输出正弦波。
- K2键按下,双通道输出方波。
- K3键按下,双通道输出正弦波。
- 摇杆OK键按下,双通道输出直流。
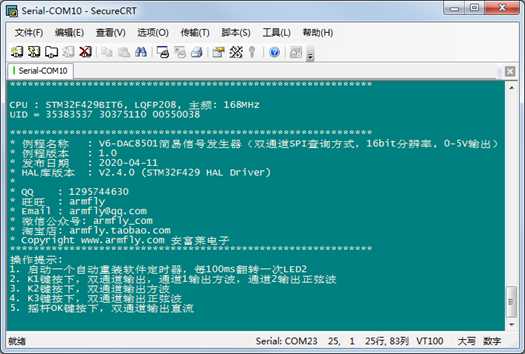
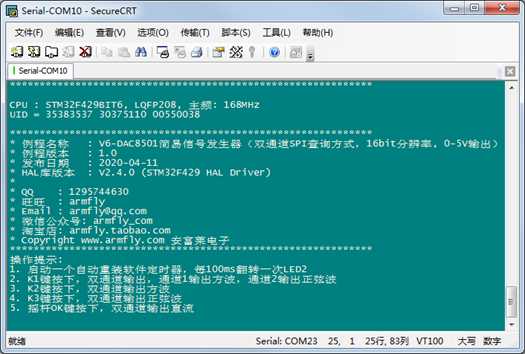
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1。
波形效果:
模块插入位置:
程序设计:
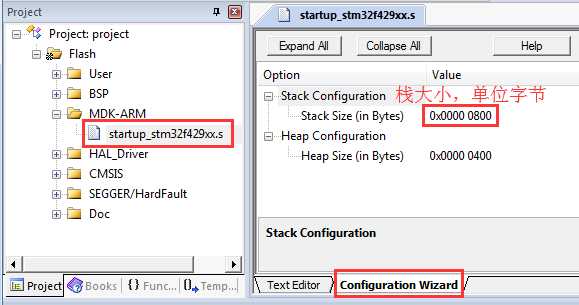
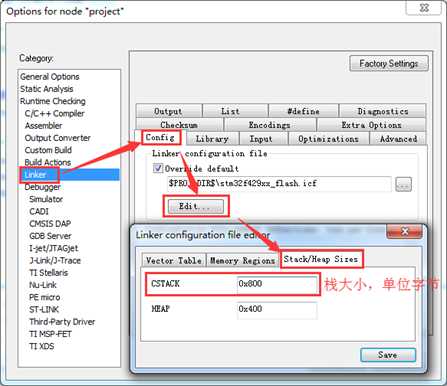
系统栈大小分配:
硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/* ********************************************************************************************************* * 函 数 名: bsp_Init * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次 * 形 参:无 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_Init(void) { /* STM32F429 HAL 库初始化,此时系统用的还是F429自带的16MHz,HSI时钟: - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。 - 设置NVIV优先级分组为4。 */ HAL_Init(); /* 配置系统时钟到168MHz - 切换使用HSE。 - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。 */ SystemClock_Config(); /* Event Recorder: - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。 - 默认不开启,如果要使能此选项,务必看V5开发板用户手册第8章 */ #if Enable_EventRecorder == 1 /* 初始化EventRecorder并开启 */ EventRecorderInitialize(EventRecordAll, 1U); EventRecorderStart(); #endif bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */ bsp_InitTimer(); /* 初始化滴答定时器 */ bsp_InitUart(); /* 初始化串口 */ bsp_InitExtIO(); /* 初始化扩展IO */ bsp_InitLed(); /* 初始化LED */ BEEP_InitHard(); /* 初始化蜂鸣器 */ /* 针对不同的应用程序,添加需要的底层驱动模块初始化函数 */ bsp_InitSPIBus(); /* 配置SPI总线 */ bsp_InitDAC8501(); /* 初始化配置DAC8501 */ }
主功能:
主程序实现如下操作:
- 启动一个自动重装软件定时器,每100ms翻转一次LED4。
- K1键按下,双通道输出,通道1输出方波,通道2输出正弦波。
- K2键按下,双通道输出方波。
- K3键按下,双通道输出正弦波。
- 摇杆OK键按下,双通道输出直流。
/* ********************************************************************************************************* * 函 数 名: main * 功能说明: c程序入口 * 形 参: 无 * 返 回 值: 错误代码(无需处理) ********************************************************************************************************* */ int main(void) { bsp_Init(); /* 硬件初始化 */ PrintfLogo(); /* 打印例程名称和版本等信息 */ DemoSpiDac(); /* SPI DAC测试 */ } /* ********************************************************************************************************* * 函 数 名: DemoSpiDac * 功能说明: DAC8501测试 * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ void DemoSpiDac(void) { uint8_t i=0; uint8_t ucKeyCode; /* 按键代码 */ sfDispMenu(); /* 打印命令提示 */ bsp_StartAutoTimer(0, 200); /* 启动1个100ms的自动重装的定时器 */ /* 生成方波数据 */ for(i =0; i< 50; i++) { ch1buf[i] = 0; } for(i =50; i< 100; i++) { ch1buf[i] = 65535; } /* 生成正弦波数据 */ MakeSinTable(ch2buf, 100, 0, 65535); /* 配置个TIM6中断,频率DAC_OUT_FREQ */ bsp_SetTIMforInt(TIM6, DAC_OUT_FREQ, 2, 0); while(1) { bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */ /* 判断定时器超时时间 */ if (bsp_CheckTimer(0)) { /* 每隔100ms 进来一次 */ bsp_LedToggle(4); } /* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */ ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */ if (ucKeyCode != KEY_NONE) { switch (ucKeyCode) { case KEY_DOWN_K1: /* K1键按下,双通道输出,通道1输出方波,通道2输出正弦波 */ /* 生成方波数据 */ for(i =0; i< 50; i++) { ch1buf[i] = 0; } for(i =50; i< 100; i++) { ch1buf[i] = 65535; } /* 生成正弦波数据 */ MakeSinTable(ch2buf, 100, 0, 65535); break; case KEY_DOWN_K2: /* K2键按下,双通道输出方波 */ /* 生成方波数据 */ for(i =0; i< 50; i++) { ch1buf[i] = 0; ch2buf[i] = 0; } for(i =50; i< 100; i++) { ch1buf[i] = 65535; ch2buf[i] = 65535; } break; case KEY_DOWN_K3: /* K3键按下,双通道输出正弦波 */ MakeSinTable(ch1buf, 100, 0, 65535); MakeSinTable(ch2buf, 100, 0, 65535); break; case JOY_DOWN_OK: /* 摇杆OK键按下,双通道输出直流 */ /* 通道1输出-10V */ for(i = 0; i < 100; i++) { ch1buf[i] = 0; } /* 通道2输出 10V */ for(i = 0; i < 100; i++) { ch2buf[i] = 65535; } break; default: /* 其它的键值不处理 */ break; } } } }
34.11 实验例程说明(IAR)
配套例子:
V6-015_DAC8501简易信号发生器(双路输出,16bit分辨率, 0-5V输出)
实验目的:
- 学习DAC8501的SPI DMA驱动方式实现。
实验内容:
- DAC8501模块上带了两片8501,每片是单通道DAC,片上输出缓冲运放,轨到轨输出,16bit分辨率,支持30MHz的SPI时钟速度。
- DAC8501供电电压2.7-5.5V,模拟输出带宽350KHz。
实验操作:
- 启动一个自动重装软件定时器,每100ms翻转一次LED2。
- K1键按下,双通道输出,通道1输出方波,通道2输出正弦波。
- K2键按下,双通道输出方波。
- K3键按下,双通道输出正弦波。
- 摇杆OK键按下,双通道输出直流。
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1。
波形效果:
模块插入位置:
程序设计:
系统栈大小分配:
硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/* ********************************************************************************************************* * 函 数 名: bsp_Init * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次 * 形 参:无 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_Init(void) { /* STM32F407 HAL 库初始化,此时系统用的还是F407自带的16MHz,HSI时钟: - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。 - 设置NVIV优先级分组为4。 */ HAL_Init(); /* 配置系统时钟到168MHz - 切换使用HSE。 - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。 */ SystemClock_Config(); /* Event Recorder: - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。 - 默认不开启,如果要使能此选项,务必看V5开发板用户手册第8章 */ #if Enable_EventRecorder == 1 /* 初始化EventRecorder并开启 */ EventRecorderInitialize(EventRecordAll, 1U); EventRecorderStart(); #endif bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */ bsp_InitTimer(); /* 初始化滴答定时器 */ bsp_InitUart(); /* 初始化串口 */ bsp_InitExtIO(); /* 初始化扩展IO */ bsp_InitLed(); /* 初始化LED */ BEEP_InitHard(); /* 初始化蜂鸣器 */ /* 针对不同的应用程序,添加需要的底层驱动模块初始化函数 */ bsp_InitSPIBus(); /* 配置SPI总线 */ bsp_InitDAC8501(); /* 初始化配置DAC8501 */ }
主功能:
主程序实现如下操作:
- 启动一个自动重装软件定时器,每100ms翻转一次LED4。
- K1键按下,双通道输出,通道1输出方波,通道2输出正弦波。
- K2键按下,双通道输出方波。
- K3键按下,双通道输出正弦波。
- 摇杆OK键按下,双通道输出直流。
/* ********************************************************************************************************* * 函 数 名: main * 功能说明: c程序入口 * 形 参: 无 * 返 回 值: 错误代码(无需处理) ********************************************************************************************************* */ int main(void) { bsp_Init(); /* 硬件初始化 */ PrintfLogo(); /* 打印例程名称和版本等信息 */ DemoSpiDac(); /* SPI DAC测试 */ } /* ********************************************************************************************************* * 函 数 名: DemoSpiDac * 功能说明: DAC8501测试 * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ void DemoSpiDac(void) { uint8_t i=0; uint8_t ucKeyCode; /* 按键代码 */ sfDispMenu(); /* 打印命令提示 */ bsp_StartAutoTimer(0, 200); /* 启动1个100ms的自动重装的定时器 */ /* 生成方波数据 */ for(i =0; i< 50; i++) { ch1buf[i] = 0; } for(i =50; i< 100; i++) { ch1buf[i] = 65535; } /* 生成正弦波数据 */ MakeSinTable(ch2buf, 100, 0, 65535); /* 配置个TIM6中断,频率DAC_OUT_FREQ */ bsp_SetTIMforInt(TIM6, DAC_OUT_FREQ, 2, 0); while(1) { bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */ /* 判断定时器超时时间 */ if (bsp_CheckTimer(0)) { /* 每隔100ms 进来一次 */ bsp_LedToggle(4); } /* 按键滤波和检测由后台systick中断服务程序实现,我们只需要调用bsp_GetKey读取键值即可。 */ ucKeyCode = bsp_GetKey(); /* 读取键值, 无键按下时返回 KEY_NONE = 0 */ if (ucKeyCode != KEY_NONE) { switch (ucKeyCode) { case KEY_DOWN_K1: /* K1键按下,双通道输出,通道1输出方波,通道2输出正弦波 */ /* 生成方波数据 */ for(i =0; i< 50; i++) { ch1buf[i] = 0; } for(i =50; i< 100; i++) { ch1buf[i] = 65535; } /* 生成正弦波数据 */ MakeSinTable(ch2buf, 100, 0, 65535); break; case KEY_DOWN_K2: /* K2键按下,双通道输出方波 */ /* 生成方波数据 */ for(i =0; i< 50; i++) { ch1buf[i] = 0; ch2buf[i] = 0; } for(i =50; i< 100; i++) { ch1buf[i] = 65535; ch2buf[i] = 65535; } break; case KEY_DOWN_K3: /* K3键按下,双通道输出正弦波 */ MakeSinTable(ch1buf, 100, 0, 65535); MakeSinTable(ch2buf, 100, 0, 65535); break; case JOY_DOWN_OK: /* 摇杆OK键按下,双通道输出直流 */ /* 通道1输出-10V */ for(i = 0; i < 100; i++) { ch1buf[i] = 0; } /* 通道2输出 10V */ for(i = 0; i < 100; i++) { ch2buf[i] = 65535; } break; default: /* 其它的键值不处理 */ break; } } } }
34.12 总结
本章节涉及到的知识点非常多,需要大家稍花点精力去研究。
以上是关于STM32F429开发板用户手册第34章 STM32F429的SPI总线应用之驱动DAC8501(双路输出,16bit分辨率,0-5V)的主要内容,如果未能解决你的问题,请参考以下文章
STM32F429开发板用户手册第19章 STM32F429的GPIO应用之按键FIFO
STM32F429开发板用户手册第21章 STM32F429的NVIC中断分组和配置(重要)
STM32F429开发板用户手册第23章 STM32F429的USART串口基础知识和HAL库API
STM32F429开发板用户手册第22章 STM32F429的SysTick实现多组软件定时器