微型三维图像传感器采用飞行时间技术
Posted wujianming-110117
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了微型三维图像传感器采用飞行时间技术相关的知识,希望对你有一定的参考价值。
微型三维图像传感器采用飞行时间技术
Tiny 3D image sensor uses time of flight technology
英飞凌科技股份公司(Infineon Technologies AG)与软件和3D飞行时间(ToF)系统专家pmdtechnologies AG合作,宣称拥有业界最小、功能最强的3D图像传感器。在CES2020上发布的新REAL3单芯片解决方案是英飞凌的第五代ToF深度传感器。除了4.4 x 5.1毫米的小尺寸外,该芯片以低功耗提供最高分辨率的数据。
英飞凌的深度传感器,或深度传感器ToF技术,可以为需要与原始图像精确匹配的应用程序提供面部、手部细节或物体的精确3D图像。举个例子,使用不需要银行详细信息、银行卡或出纳员的移动电话或设备进行支付交易,并且通过面部识别进行支付。
“这需要非常可靠和安全的图像和高分辨率三维图像数据的返回传输。这同样适用于用3D图像安全解锁设备,”Infineon说。

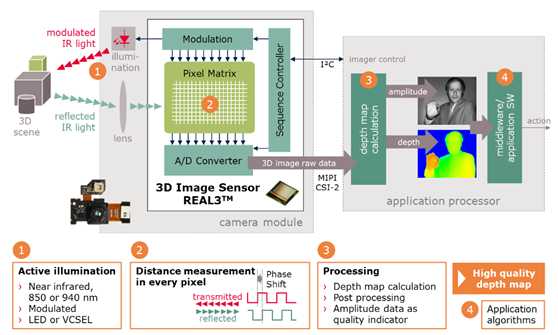
图. 飞行时间(ToF)技术对反射光的深度、振幅和相位差进行逐像素测量,以构建三维图像。
主要功能包括在极端照明条件下工作的能力,包括明亮的阳光和黑暗,以及增强现实(AR)体验的实时全三维地图。该芯片还为相机应用提供了额外的选择,如增强的自动对焦、照片和视频的bokeh效果,以及在光线较差的情况下提高分辨率。
REAL3芯片将于2020年中期开始生产。英飞凌还提供了一个优化的照明驱动器(IRS9100C),作为一个完整的解决方案的一部分,进一步提高性能,尺寸和成本,该公司说。
以上是关于微型三维图像传感器采用飞行时间技术的主要内容,如果未能解决你的问题,请参考以下文章
三维角度传感器,如何把各个轴测出的的角速度和加速度的值用C语言转化为 角度的值,求转化公式谢谢大家
百万年薪社招 | 图像识别SLAM/VIO/SFM三维算法高精度地图感知/传感器融合方向