传感器标定两篇顶会论文解析
Posted wujianming-110117
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了传感器标定两篇顶会论文解析相关的知识,希望对你有一定的参考价值。
传感器标定两篇顶会论文解析
一.在城市环境中的多个3D激光雷达的自动校准
标题:Automatic Calibration of Multiple 3D LiDARs in Urban Environments
作者:Jianhao Jiao, Yang Yu, Qinghai Liao, Haoyang Ye, Rui Fan, Ming Liu
来源:2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
摘要
自动驾驶汽车上逐渐出现了多个激光雷达,以提供丰富的视野和密集的测量结果。然而,精确校准的缺失,对它们的潜在应用有负面的影响。在本文中,我们提出了一个新颖的系统,该系统能够在不需要任何校准目标,先验环境信息,以及手动初始化的情况下,实现多激光雷达的自动校准。我们的方法从通过对齐每个传感器的运动开始,进行手眼校准。然后通过最小化由点平面距离构造的损失函数,通过基于外观的方法精细化初始的结果。
基于仿真和真实世界数据的实验结果,表明了我们的校准方法的可靠性和准确性。对于运动平台来说,我们提出的方法能够分别以0.04弧度和0.1m的旋转和平移误差来校准一个多激光雷达系统。
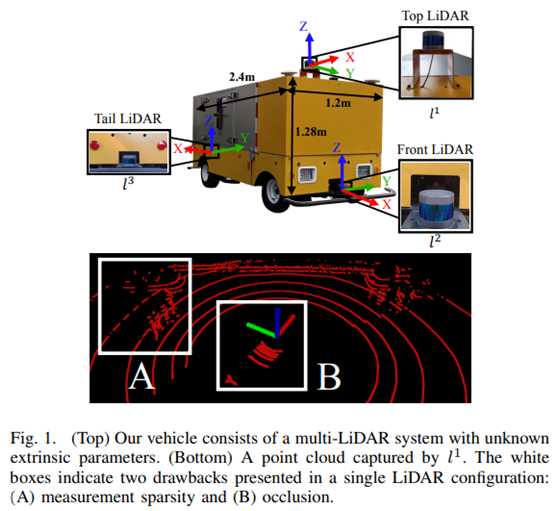
图1 顶部为由未知外参的多雷达系统组成的车辆;底部的两个白色框中,表示的是单个激光雷达配置的两个缺点:A,测量稀疏性;B,遮挡。
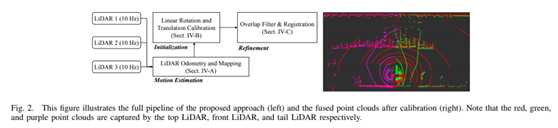
图2 提出的方法的管道流程以及校准后的融合点云。(注意,红,绿,紫色的点云分别表示的是车顶部,前面,尾部的雷达捕获的数据。)
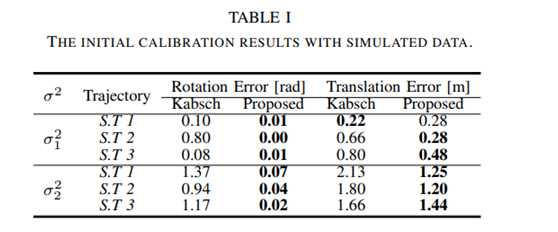
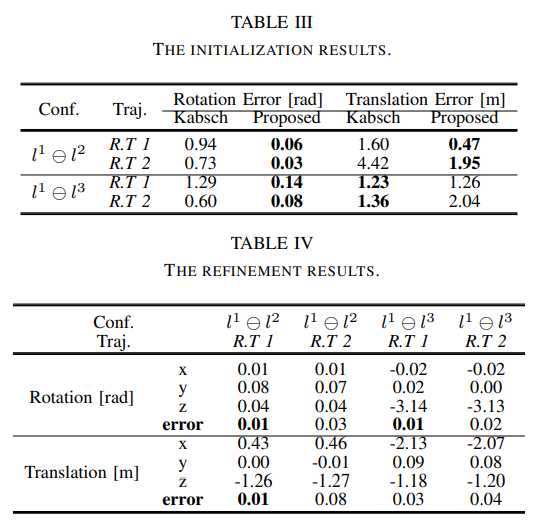
表1 基于仿真数据的初始校准结果。
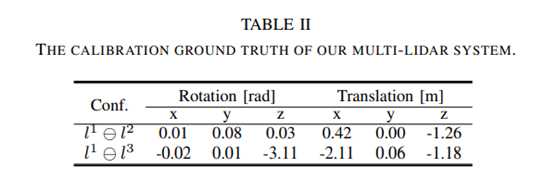
表2 我们的多激光雷达系统校准的真实结果。
二.具有无尺度传感器的车辆的鲁棒外参校准框架
标题:A Robust Extrinsic Calibration Framework for Vehicles with Unscaled Sensors
作者:Celyn Walters, Oscar Mendez, Simon Hadfield, Richard Bowden
来源:2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
摘要
准确的外部传感器校准对于自动驾驶车辆和机器人都是必不可少的。传统上,这是一个已知基准标记,涉及校准目标的过程,它通常在实验室中进行。而且,传感器布局的很小变化都会导致需要重新校准。随着消费者自动驾驶汽车的预计到来,有这样的一个需求:在部署后不需要专门的人类专业知识,让系统自动进行校准。
为了解决这一限制,我们提出了一个灵活的框架,它无需明确的校准阶段,即可估算外参,即使对于尺度未知的传感器也是如此。我们的第一个贡献是,通过联合恢复尺度来建立标准的手眼校准。我们的第二个贡献是通过收集独立的位姿集并自动选择最理想的位姿,我们的系统对于不完善和退化的传感器数据具有强大的鲁棒性。
我们展示了我们方法的鲁棒性对于目标场景至关重要。和先前的方法不同,我们的方法能够实时且不断地估计外部的变换。和这些方法的相比,对于理想的实验设置和真实的使用案例,我们的方法展示了比最先进的方法更佳的性能。而且,我们证明恢复的尺度可能被应用于整个轨迹,从而避免了通过传感器融合进行需要的尺度估计。
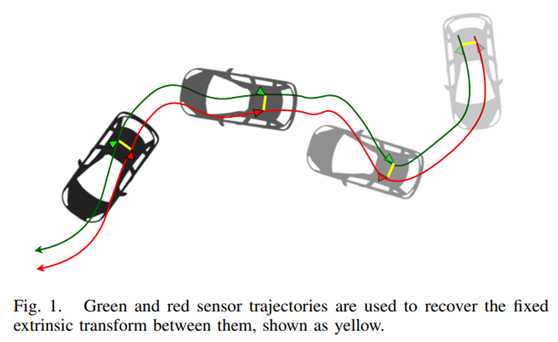
图1 绿色和红色的传感器轨迹被用来恢复它们之间固定的外部变换,如图中黄线所示。
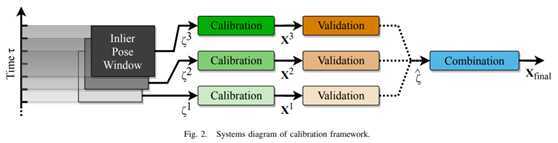
图2 校准框架的系统框图。
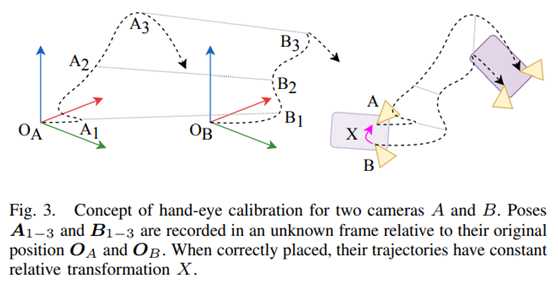
图3 对于两个传感器A和B的手眼校准概述。A1-3和B1-3分别以一个未知的相对于它们原始位置O_A和O_B的坐标系被记录。当被正确放置,它们的轨迹有不变的变换X。
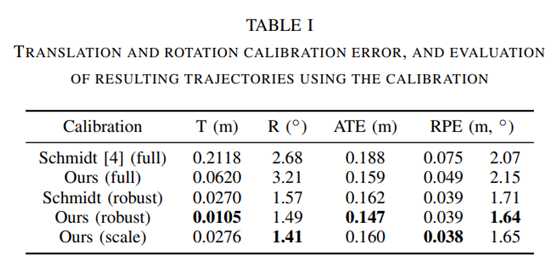
表1 旋转和平移校准误差,以及使用该校准得到的轨迹误差评估结果。
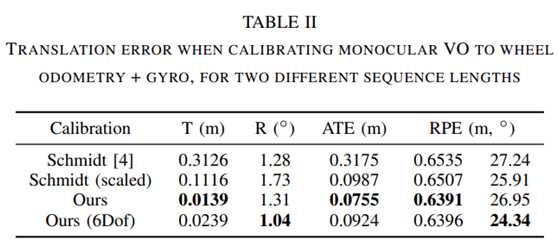
表2 对于两个不同的序列长度,当校准单目VO到轮式里程计+陀螺仪时的平移误差。
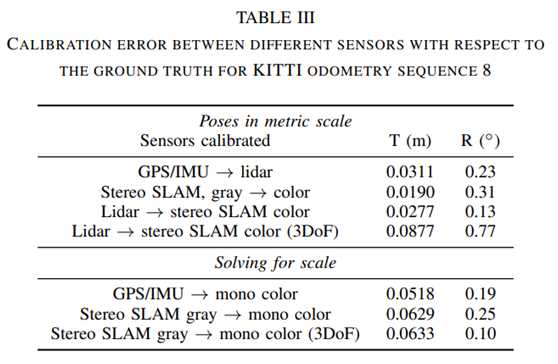
表3 对于KITTI单目序列8,相对真实情况的不同传感器间的校准结果。
以上是关于传感器标定两篇顶会论文解析的主要内容,如果未能解决你的问题,请参考以下文章
近期必读的6篇顶会WWW2020推荐系统相关论文-Part3
港科大硕士ICCV论文被指抄袭,导师不知情,二作震惊求撤稿,网友:其余12篇顶会都查查...