文献阅读-FERONIA受体激酶通过调控ROS来调控自交不亲和
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了文献阅读-FERONIA受体激酶通过调控ROS来调控自交不亲和相关的知识,希望对你有一定的参考价值。
参考技术A 大家好,本次阅读的文献是近期发表在《current biology》上的《FERONIA receptor kinase-regulated reactive oxygen species mediate self-incompatibility in Brassica rapa》的一文,通讯作者是山东农业大学园艺学院的段巧红教授,近期来该课题组在FER受体激酶在生殖过程中的功能研究取得的一系列卓有成效的结果。大多数芸苔科植物演化出自交不亲和(self-incompatibility, SI)的机制,以避免近交来产生杂交优势,例如我们熟知的 小肽SP11-受体SRK信号通路来调控自交不亲和,但是柱头是如何拒绝自身的花粉目前还未知。本文以大白菜为模型探究了柱头中的ROS对于SI的影响。
为了确定ROS是否参与大白菜的SI,在SI和CP(相容性花粉)授粉后不同时间点对大白菜柱头进行,7’-dichlorodihydrofluorescein diacetate (H2DCFDA)染色,可以发现SI时,柱头的ROS会上升,但是CP时,柱头会明显下降。通过与细胞壁的marker PI染色,发现在ROS主要定位在贴近质膜的胞质中。此外,利用其他两种ROS的探针:hydroxyphenyl fluorescein 和 dihydroethidium 也得到了类似的结果。
为了探讨自花授粉后柱头ROS增加的分子机制,他们抑制了SRK的表达来降低SP11-SRK信号通路来检测ROS,由于大白菜遗传转化非常困难,于是他们利用 antisense oligodeoxyribonucleotide(AS-ODN)技术来进行敲低,AS-BrSRK46(V)的施加成功降低SI反应。有趣的是SRK的敲低不仅降低了未授粉的柱头的ROS,而且抑制了自交时ROS的增加。
那么高水平的ROS是否是拒绝自身花粉的原因呢?这里作者采用了ROS 各种ROS的清除剂CuCl2, Tiron, KI, or sodium benzoate, 这些抑制剂均有效的抑制了柱头的ROS,并且以剂量依赖性的方式增加花粉管的穿出。( 重点:活性氧清除剂在指定浓度下并没有抑制亲和花粉的生长,表明柱头和花粉活力没有受到影响 )。因此这些结果明确地表明,柱头ROS的增加是排斥自身花粉的必要因素。为了进一步证实该观点,作者进行一个‘‘stigma transfer experiment’’实验,在施加自身花粉0-60min的柱头转入ROS的抑制剂中。花粉管的萌发数随着转移的时间而减少。有趣的是,他们还利用了黄嘌呤/黄嘌呤氧化酶(X/XO)或是FeSO4 (Fe2+介导的Fenton反应)来在柱头产生ROS,对于相容性花粉也不能正常萌发。因此,ROS的增加对花粉具有非选择性的抑制作用。但是如果采用正常情况下混有两种不同类型的花粉分别授粉柱头一半时,发现相容性花粉仍能萌发,但是自交的不能萌发。因此推测当柱头遇到自交花粉粒和亲和花粉粒的混合时,诱导的ROS增加或减少会使附近的亲和花粉萌发,而自交花粉粒不萌发(如果能完全混合,其中一方有marker标记结果应该会非常有意思)。
植物中ROS主要由NADPH产生,那么这个过程是否有NADPH调控呢?通过施加NADPH的抑制剂diphenyleneiodonium chloride (DPI),发现合适的浓度可以使得自交花粉管生长,因此ROS的产生应该主要是由NADPH所调控的。大白菜中一共有13个NADPH编码基因,其中BrRbohD1, BrRbohD2, BrRbohF, 和 BrRbohI主要在柱头表达。BrRbohF的敲低能够降低SI,此外BrRbohD1, BrRbohD2, 和 BrRbohl敲低也能降低柱头ROS的表达并且略降低SI,暗示着这些Rboh可能发挥着冗余地功能。为了进一步证明ROS调控SI在十字花科植物的保守性,他们还在萝卜和甘蓝的柱头上进行NADPH抑制剂的处理,发现也能降低ROS。
此外在用ROS降低的材料中,发现花粉管的生长长度明显增加,暗示着ROS的降低可能对于相容性花粉的萌发具有促进作用。在自交相容性的拟南芥的 rbohd 中,在授粉前后柱头均具有更低的ROS累积水平且花粉管萌发加快。因此RBOH酶作为关键酶,在CP时促进花粉萌发,但是SI时抑制。
那么什么调控了RBOH的酶活呢?在先前的研究中发现RBOH受到ROP的激活,通过抑制剂和敲低证明了ROP2调控并且通过互作验证了ROP8与RBOHF存在直接互作。
由于FER在柱头上也有表达,FER是否也参与这个过程呢?在拟南芥中,突变体柱头ROS下降且短时间内花粉生长速度加快(李超 science表型),在大白菜中,敲低FER显著降低NADPH的表达以及ROS在柱头的累积,同样降低了ROS并降低了SI。因此,FER-Rac/Rop GTPase-Rboh信号通路对于SI以及维持未授粉柱头ROS的基本水平是必要的。
一个问题:SI和CP中FER是如何识别的,单独信号还是受到SP11-SRK的调控?
ROS2极简总结-MoveIt2
用于 ROS 2 的 MoveIt 运动规划框架。
The MoveIt Motion Planning Framework for ROS 2.

参考文献:MoveIt2
MoveIt2功能
- 运动规划
- 生成高自由度轨迹
- 可在杂乱的环境中运动并避免局部最小值
- 操纵
- 通过抓取生成分析环境并与环境交互
- 逆向运动学
- 求解给定姿势的关节位置,也适用于过度制动的手臂中
- 控制
- 使用通用接口对低级硬件控制器执行时间参数化联合轨迹
- 3D 感知
- 使用 Octomaps 连接深度传感器和点云
- 碰撞检查
- 使用几何图元、网格纹理或点云避开障碍物
时间线
MoveIt2(ROS2) vs MoveIt1(ROS1)
- 实时功能现已可用(ROS2)
- 专为生产而设计 - 同样支持研发
- 多平台:Linux、Windows、macOS 全部都支持!
里程碑
- M1:直接端口到 ROS2
- 将现有包完全迁移到 ROS2
- 利用 ROS2 功能:编译(ament)、中间件、日志记录、参数
- M2:实时支持
- 对传感器输入的反应式闭环控制
- 混合规划(全局和局部)
- 与控制器的零内存复制集成
- M3:充分利用ROS2
- MoveIt 节点的生命周期管理
- 利用 ROS2 组件节点
实时功能(M2)
在线机器人操作需要实时安全:
- 通过力、扭矩与环境进行复杂的相互作用
- 推、抛、拧
- 启用:
- 反应式闭环控制
- 高速率联合命令流(例如 >1 kHz)
- 低延迟和可靠的传感器->控制管道
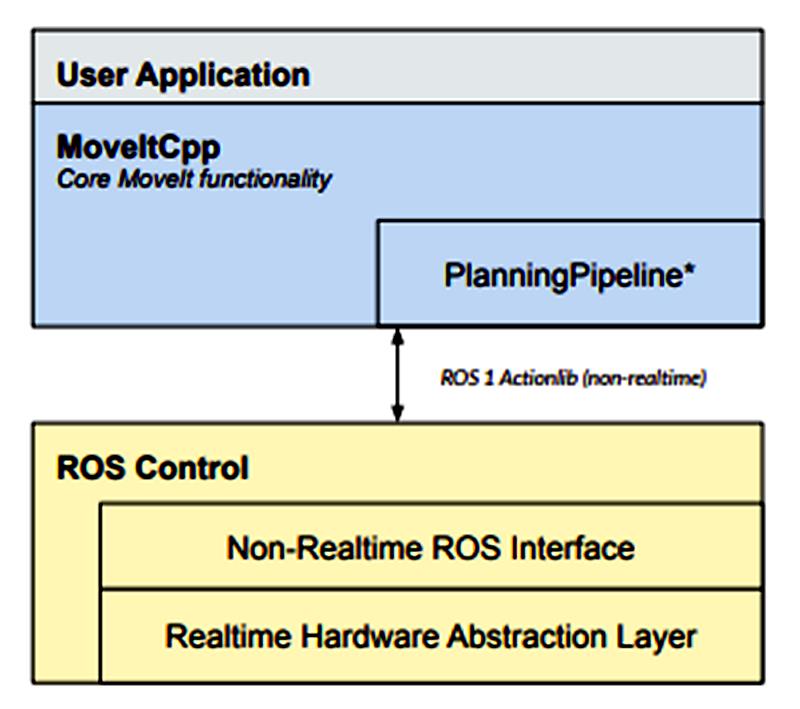
使用 MoveItCpp 改进 MoveIt 1
直接访问核心 MoveIt 组件
- 支持多个规划管道
- 支持运行多个机器人
- 更灵活的配置
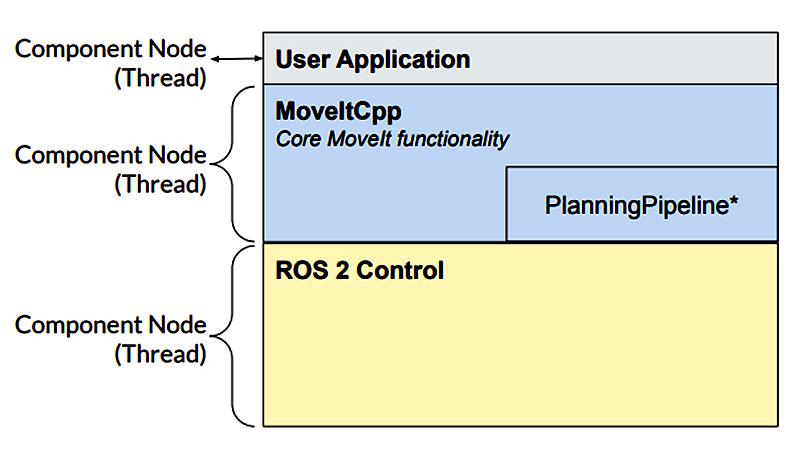
架构(M3)
利用 ROS2 组件节点获得更好的性能
混合规划
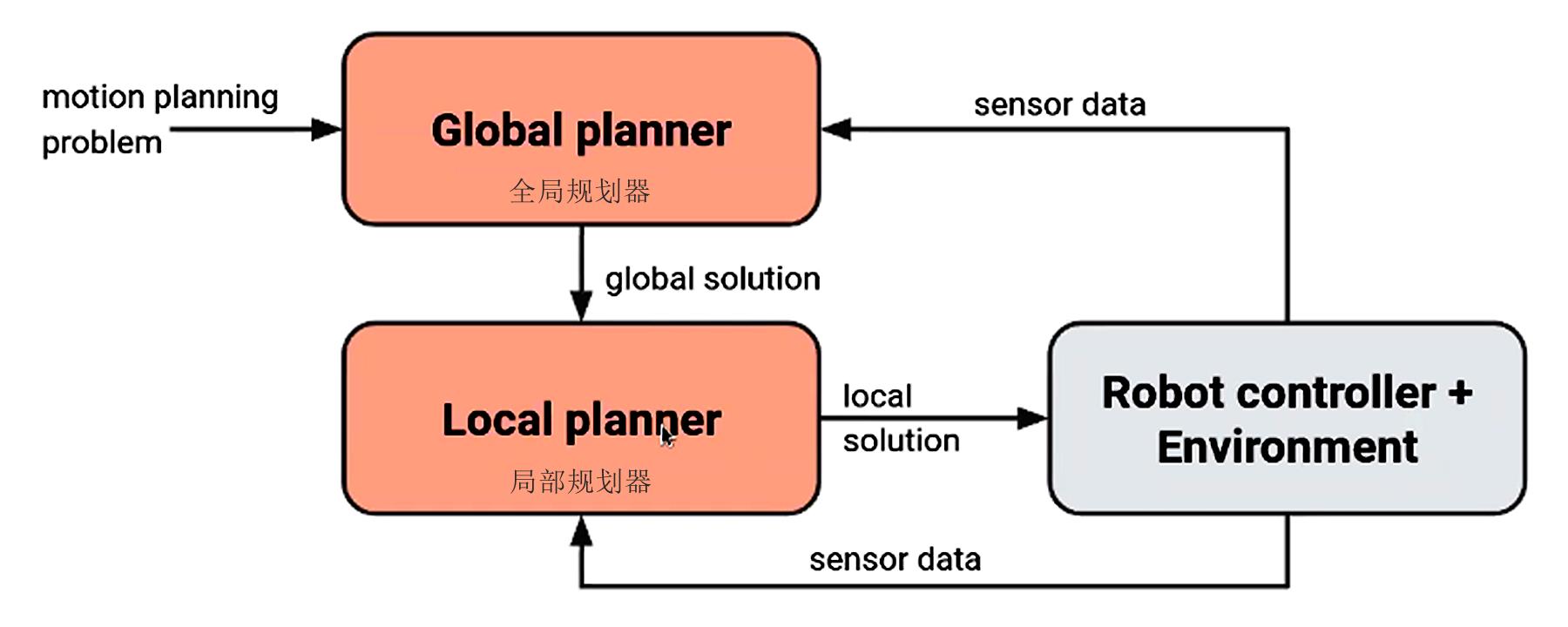
全局规划
- 优点:
- 围绕复杂的障碍物进行规划
- 避免陷入局部最小值
- 完成:如果存在,将找到解决方案
- 缺点:
- 较慢的计算时间
- 非实时
- 不确定
局部规划
- 优点
- 快速/反应式
- 确定性的
- 非常适合视觉伺服
- 缺点
- 陷入局部最小值
- 更少的碰撞安全保障
核心概念
- 机器人状态
- 包含几何信息和关节值
- 当前状态监视器
- 通过订阅 /joint_states(由驱动程序提供)更新机器人状态
- 规划场景
- 碰撞检查和约束检查
- 规划场景监视器
- 通过 ROS 接口更新规划场景
- 控制器接口
- 使用 FollowJointTrajectory 发布的规划轨迹(由驱动程序使用)
MoveIt2 配置
- URDF - 通用机器人描述格式
- 安全控制器
- 用于碰撞检查的网格
- UR5 说明
- SRDF - 语义机器人描述格式
- 关节组(关节和连杆的集合)
- 作为关节、连杆或串联链
- 虚拟和被动关节
- 机器人姿势
- 自碰撞
- UR5 SRDF
- 关节组(关节和连杆的集合)
- 其他配置
- 关节限制、运动学和运动规划插件
MoveItCpp API
// \\brief load the robot model,
// configure the planning pipeline from ROS2 parameters and
// initialize defaults
moveit_cpp_ = std::make_shared<moveit::planning_interface::MoveItCpp>(node_);
// \\brief associated to a planning group
// used to setup the motion plan request and
// call the low-level planner
moveit::planning_interface::PlanningComponent arm("ur5_arm", moveit_cpp_);
/** \\brief Set the goal constraints generated from target pose and robot link */
geometry_msgs::PoseStamped target_pose1;
target_pose1.header.frame_id = "base_link";
target_pose1.pose.orientation.w = 1.0;
target_pose1.pose.position.x = 0.28;
target_pose1.pose.position.y = -0.2;
target_pose1.pose.position.z = 0.5;
arm->setGoal(target_pose1, "ee_link");
/** \\brief Set the goal constraints generated from a named target state */
arm->setGoal("ready");约束规划
用于如下场合:
- 约束机器人运动
- 定义规划目标
kinematic_constraints::JointConstraint
kinematic_constraints::OrientationConstraint
kinematic_constraints::PositionConstraint
kinematic_constraints::VisibilityConstraint
例如: 使用为机器人上的连杆指定的路径约束进行规划
moveit_msgs::OrientationConstraint ocm;
ocm.link_name = "panda_link7";
ocm.header.frame_id = "panda_link0";
ocm.orientation.w = 1.0;
ocm.absolute_x_axis_tolerance = 0.1;
ocm.absolute_y_axis_tolerance = 0.1;
ocm.absolute_z_axis_tolerance = 0.1;将此设置为计划组的路径约束
moveit_msgs::Constraints test_constraints;
test_constraints.orientation_constraints.push_back(ocm);
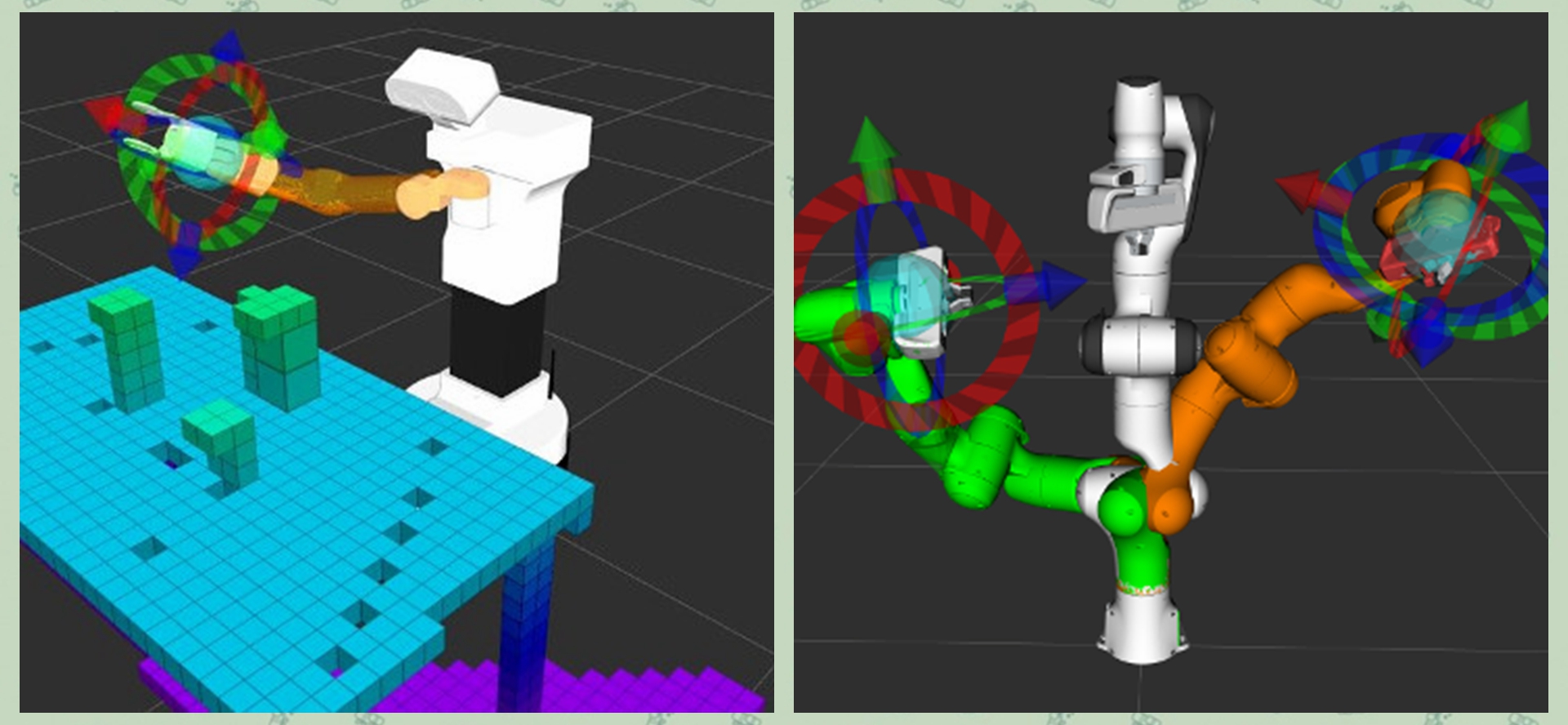
move_group_interface.setPathConstraints(test_constraints);笛卡尔规划
- 末端执行器沿表面精确路径(焊接和喷漆应用)
- 为末端执行器指定的路径点列表
- MoveIt 现在支持实时和全局、碰撞感知的笛卡尔规划
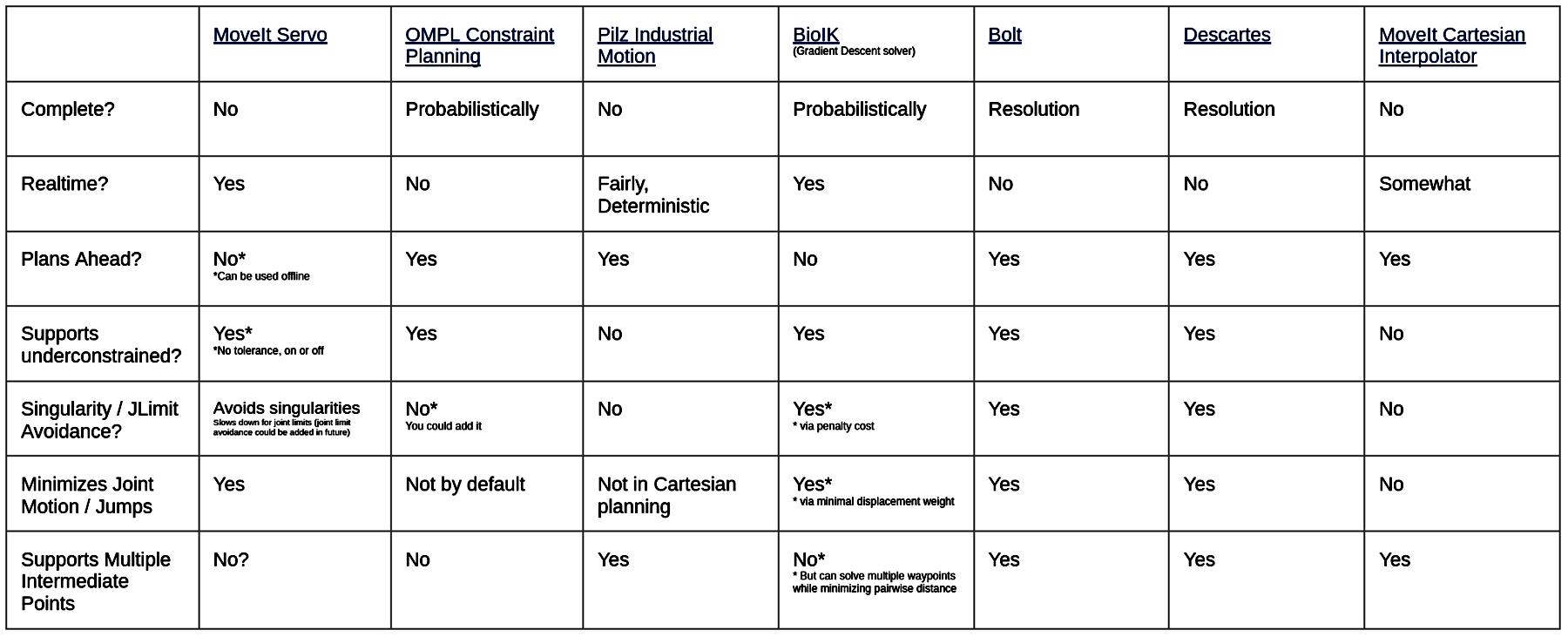
理想的属性
完整性、约束不足、提前规划、实时
std::vector<geometry_msgs::Pose> waypoints;
waypoints.push_back(start_pose);
geometry_msgs::Pose way_pose;
waypoints.push_back(way_pose);
way_pose.position.y -= 0.2;
waypoints.push_back(way_pose); // right
way_pose.position.z += 0.2;
way_pose.position.y += 0.2;
way_pose.position.x -= 0.2;
waypoints.push_back(way_pose); // up and left现在用插值计算轨迹:
moveit_msgs::RobotTrajectory trajectory;
const double jump_threshold = 0.0;
const double eef_step = 0.01;
double fraction = move_group_interface.computeCartesianPath(waypoints, eef_step, jump_threshold, trajectory);更多内容参考:Github之moveit2。
以上是关于文献阅读-FERONIA受体激酶通过调控ROS来调控自交不亲和的主要内容,如果未能解决你的问题,请参考以下文章
文献解读 MiRNA调控异常及其在精神分裂症治疗中的潜在应用