汽车智能技术学些啥?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了汽车智能技术学些啥?相关的知识,希望对你有一定的参考价值。
汽车智能化技术主要包含计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术。1、智能汽车首先有一套导航信息资料库,存有全国高速公路、普通公路、城市道路以及各种服务设施(餐饮、旅馆、加油站、景点、停车场)的信息资料;
2、GPS定位系统,利用这个系统精确定位车辆所在的位置,与道路资料库中的数据相比较,确定以后的行驶方向;
3、道路状况信息系统,由交通管理中心提供实时的前方道路状况信息,如堵车、事故等,必要时及时改变行驶路线;
4、车辆防碰系统,包括探测雷达、信息处理系统、驾驶控制系统 ,控制与其他车辆的距离,在探测到障碍物时及时减速或刹车,并把信息传给指挥中心和其他车辆;
5、紧急报警系统,如果出了事故,自动报告指挥中心进行救援;
6、无线通信系统,用于汽车与指挥中心的联络;
7、自动驾驶系统,用于控制汽车的点火、改变速度和转向等。
智能车辆是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,它集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型的高新技术综合体。
目前对智能车辆的研究主要致力于提高汽车的安全性、舒适性,以及提供优良的人车交互界面。近年来,智能车辆己经成为世界车辆工程领域研究的热点和汽车工业增长的新动力,很多发达国家都将其纳入到各自重点发展的智能交通系统当中。 参考技术A 汽车智能化技术主要包含计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术。
1、智能汽车首先有一套导航信息资料库,存有全国高速公路、普通公路、城市道路以及各种服务设施(餐饮、旅馆、加油站、景点、停车场)的信息资料;
2、GPS定位系统,利用这个系统精确定位车辆所在的位置,与道路资料库中的数据相比较,确定以后的行驶方向;
3、道路状况信息系统,由交通管理中心提供实时的前方道路状况信息,如堵车、事故等,必要时及时改变行驶路线;
4、车辆防碰系统,包括探测雷达、信息处理系统、驾驶控制系统 ,控制与其他车辆的距离,在探测到障碍物时及时减速或刹车,并把信息传给指挥中心和其他车辆;
5、紧急报警系统,如果出了事故,自动报告指挥中心进行救援;
6、无线通信系统,用于汽车与指挥中心的联络;
7、自动驾驶系统,用于控制汽车的点火、改变速度和转向等。
智能车辆是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,它集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型的高新技术综合体。
目前对智能车辆的研究主要致力于提高汽车的安全性、舒适性,以及提供优良的人车交互界面。近年来,智能车辆己经成为世界车辆工程领域研究的热点和汽车工业增长的新动力,很多发达国家都将其纳入到各自重点发展的智能交通系统当中。 参考技术B 本专业培养与我国社会主义现代化建设要求相适应的,在德、智、体、美等方面全面发展的,掌握汽车智能电器技术和车身控制技术,能从事汽车智能设备生产、安装、调试,检测、维修、销售、服务等方面具有较强实践能力和良好职业道德的高素质技能型专门人才。本回答被提问者采纳 参考技术C 目前对智能车辆的研究主要;
提高汽车的安全性、舒适性,以及提供优良的人车交互。智能车辆己经成为世界车辆工程领域研究的热点和汽车工业增长的新动力,很多发达国家都将其纳入到各自重点发展的智能交通系统当中。 参考技术D 建议您可以到正规学校系统全面的学习技术:
1. 学习技术可以先从自己的兴趣爱好来考虑,毕竟这与读书是有区别的,学了技术一定程度上决定着今后你的工作类别,如果你有一门技术,那就往度擅长的哪方面去发展,这样上手快,相对应的工资也会好一点点。当然,如果你没有特别明显的技术或者回长处,那就先培养技术。
2.首先,考虑好自己的爱好,喜欢做什么类型的工作,那份工作需要什么技能,然后去学习,去培养。
3.考虑今后几年或者5年的发展趋势,往热门行业或者新行业去试探,热门行业和新行业在未来几年都会有人才短缺的现象。
4.实地考察,对学校的实训设备,实训情况,教学内容,校园环境各方面答做一个详细的了解后再进行选择。
智能网联汽车测试场设计技术要求
智能网联汽车测试场设计技术要求
智能网联汽车测试场设计技术要求
自动驾驶功能和基础道路的基本对应关系
智能网联汽车测试场的设计应以满足自动驾驶功能测试为首要目的。智能网联汽车基础自动驾驶功能参考附录A。
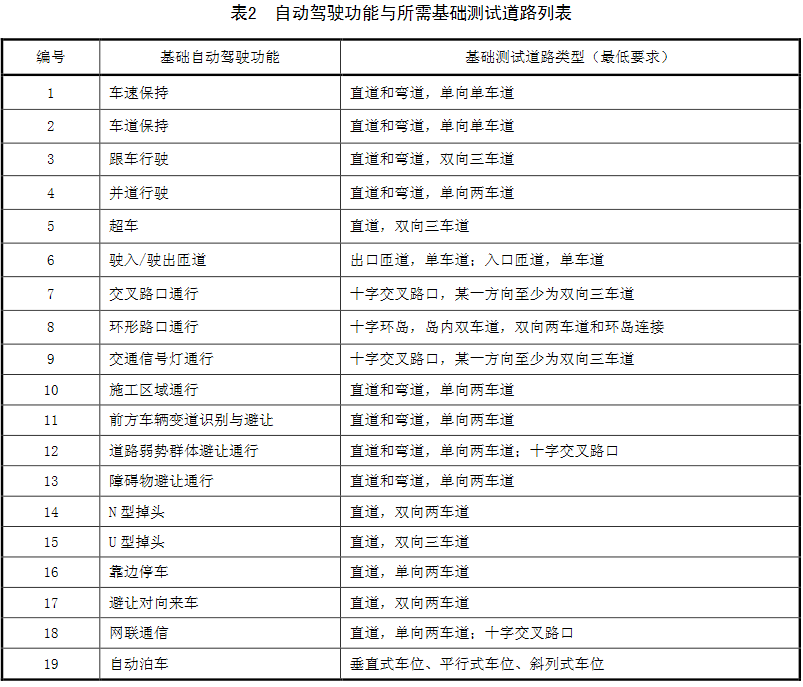
智能网联汽车每一项自动驾驶功能测试所需要的基础测试道路类型会有所不同,本文件规定的自动驾驶功能所对应的基础测试道路类型如表2所示。
智能网联汽车测试场设计时应根据测试场所需满足的基础自动驾驶功能测试要求,选择相应的基础测试道路类型作为测试场设计的最低要求。
当不同自动驾驶功能对应的基础测试道路类型有重叠或者包含关系时,宜选择覆盖自动驾驶功能最广的基础道路类型进行测试场设计,提高道路使用效率,避免重复建设。
一般测试道路技术要求
高速测试道路
结合测试场实际情况,高速测试道路宜选择建设以下类型的高速道路:
a)高速直道,可选择单向两车道、单向三车道、双向四车道、双向六车道等,同时可选择有坡度和无坡度两种情况;
b)高速弯道,可选择单向两车道、单向三车道、双向四车道、双向六车道等,同时可选择有坡度和无坡度两种情况;
c)高速上下匝道,可选择单向单车道、单向两车道;
d)高速测试道路建设选择的原则为:尽可能丰富高速测试道路类型,通过不同高速测试道路类型的选择,提供丰富的高速公路测试场景。高速测试道路设计与施工应满足JTG B01和JTG D80等相关标准。
城市测试道路
结合测试场实际情况,城市测试道路宜选择建设以下类型的城市道路:
a)城市单行道,包括单向单车道、单向两车道等,同时可包含有坡道和无坡道两种情况,可选择设置人行横道红绿灯;
b)城市双向直道,包括双向两车道、双向三车道、双向四车道等,同时可包含有坡道和无坡道两种情况,可选择设置人行横道红绿灯;
c)城市双向弯道,包括双向两车道、双向三车道、双向四车道等,同时可包含有坡道和无坡道两种情况,弯道可根据场地情况选择不同的曲率半径,宜包含多种不同曲率半径的弯道,弯道曲率半径宜从以下数值中进行选择:125m,250m,500m;
d)红绿灯交叉路口,包括T型交叉路口、Y型交叉路口、十字交叉路口、X型交叉路口、复合交叉路口等,同时交叉路口处的红绿灯设置可按照GB 14886要求配置不同形式的红绿灯;
e)环形交叉路口,包括四入口环岛、五入口环岛等;
f)行人和非机动车道,包括人行道、非机动车道;
g)城市测试道路建设选择的原则为:尽可能涵盖多种不同城市道路类型,通过不同城市道路类型的选择和组合,提供复杂多样的城市道路测试场景。城市测试道路设计与施工应满足JTG B01和GB/T 51224等相关标准。
乡村测试道路
结合测试场实际情况,乡村测试道路宜选择建设以下类型的乡村道路:
a)双向单车道,中间无分道线,包括直道和弯曲车道,弯道可根据场地情况选择不同的曲率半径,宜包含多种不同曲率半径的弯道;
b)双向两车道,中间有分道线,包括直道和弯曲车道,弯道可根据场地情况选择不同的曲率半径,宜包含多种不同曲率半径的弯道;
c)乡村测试道路建设选择的原则为:尽可能涵盖多种不同乡村道路类型,通过不同乡村道路类型的选择,提供丰富的乡村道路测试场景。乡村测试道路设计与施工应满足JTG B01和GB/T 51224等相关标准。
特殊测试道路
坡道
智能网联汽车测试场宜建设坡道测试道路以满足自动驾驶汽车坡道行驶能力测试。坡道测试道路包括直道纵坡和弯道纵坡两种类型。坡道建设的要求按照JTG D20标准进行,其中坡道的最大纵坡和最小坡长的设计参数参考下表21。

隧道(含模拟隧道)
智能网联汽车测试场宜建设隧道测试道路以满足自动驾驶汽车通过隧道的适应性测试,隧道建设的要求按照JTGB01标准进行。为了降低建设成本,亦可选择建设模拟隧道(如图21所示)。隧道(含模拟隧道)的建设长度不宜小于100m,模拟隧道所选用的材质应能够屏蔽定位和通信信号,且应能够阻挡阳光透射。

天气和灯光环境模拟道路
智能网联汽车测试场宜建设天气和灯光环境模拟道路以满足自动驾驶汽车对天气和灯光环境的适应性测试。天气模拟道路用来模拟真实雨、雾等天气,灯光模拟道路用来模拟夜晚灯光环境,应满足以下要求:
a)雨、雾等天气模拟器宜采用自动化控制系统;
b)雨、雾等天气模拟系统总长度应不小于100m;
c)灯光模拟道路总长度应不小于500m。
模拟加油站和充电站
智能网联汽车测试场宜建设模拟加油站以满足自动驾驶汽服务类应用场景的测试。模拟加油站的设计与施工要求应满足GB 50156要求。
智能网联汽车测试场宜建设模拟充电站以满足电动汽车充电场景测试。模拟充电站的设计与施工要求应满足GB 50966要求。
模拟公交站
智能网联汽车测试场宜建设模拟公交站以满足模拟自动驾驶汽车进站接驳和行驶出站场景测试。模拟公交站的设计与规划应满足CJJ 37标准要求。
模拟高速公路收费站
智能网联汽车测试场宜建设模拟高速公路收费站以满足自动驾驶汽车进出高速公路收费站场景的测试。模拟高速公路收费站应以ETC收费站建设为主,模拟高速公路收费站的设计与规划应满足JTG D20标准要求。
网联功能特殊测试道路
智能网联汽车测试场宜建设适用于网联扩展功能测试的特殊测试道路,其中网联扩展功能主要包括编队加减速、编队换道、自适应编队和绿波通行等。编队加减速、编队换道、自适应编队网联扩展功能对应的测试道路为直道、单向两车道、车道最小长度为1000 m(对应设计速度60 km/h)。绿波通行网联扩展功能对应的测试道路为红绿灯十字交叉路口,十字交叉路口的数量至少2个,且连接交叉路口的直线段长度至少200 m,入口直线段长度至少200 m。
网联功能特殊测试道路对应的路侧网联通信设备要求应满足7.1条规定的要求。
道路网联环境要求
7.1网联通信设备要求
智能网联汽车测试场宜部署C-V2X网联通信方式,且部署的C-V2X网联通信设备应支持蜂窝通信(Uu)和直连通信(PC5)两种工作模式。
C-V2X通信系统建设包括C-V2X基站部署和基于路侧单元(RSU)通信环境的搭建,应满足YD/T 3400-2018、YD/T 3340-2018标准要求。
7.1.1发射功率限值
对于路侧单元(RSU),EIRP≤29dBm。
7.1.2移动速度
C-V2X通信系统应能够支持最高相对速度为500km/h的车辆间发送消息,以及最高绝对速度为250km/h的车辆与车辆、车辆与路侧单元和行人发送消息。
7.1.3通信时延
对于支持车车和车人通信的终端,无论直接发送还是由路侧单元转发,C-V2X通信系统应保证最大空口通信时延不超过100 ms。
对于车路通信,车与路边单元的最大空口通信时延不超过100 ms。
对于经过C-V2X通信系统网络实体的车与应用服务器之间的V2N通信,最大端到端时延不超过1000 ms。
仅对于特殊用例(如碰撞感知),车与车之间、车与路侧单元之间发送消息的最大空口通信时延宜不超过20 ms。
7.1.4传输可靠性
C-V2X通信网络应不依赖应用层重传即可提供高可靠传输。
7.1.5覆盖要求
V2X业务在有运营商网络和无运营商网络覆盖的情况下均须支持。
7.1.6消息发送频率
对于周期性消息,C-V2X通信网络应能够支持路侧单元和车辆最大10 Hz的消息发送频率。
7.1.7消息大小要求
不包括安全相关的消息单元,周期性消息的大小在50-300 byte之间,事件触发的消息最大为1200 byte。
7.2高精度定位设备要求
智能网联汽车测试场应能够提供高精度定位差分信号,差分信号应满足下列要求:
a)北斗和GPS 等多种制式多频点差分增强信号;
b)支持RTD 和RTK 差分信息。实时RTK定位精度:水平优于3cm;事后静态解算精度:水平优于5mm;实时网络RTD定位精度:优于1m。兼容性要求:能够接入国内外主流厂家生产的移动终端。
7.3交通信号控制系统要求
智能网联汽车测试场内交叉路口宜部署交通信号控制系统,为自动驾驶车辆测试提供城市道路环境下真实的交叉路口场景,自动驾驶测试车辆可通过信号机数据获取丰富的交叉口信息。交通信号控制系统应满足以下要求:
a)信号机应满足GB 25280标准要求;
b)交通信号控制机应满足GB/T 20999标准要求,并兼容国家运输ITS通信协议(NTCIP)协议;
c)交通信号灯设置与安装规范应满足GB 14886标准要求,如设置有多个交通信号灯路口,则应至少有一个交通信号灯路口符合GB 14886的要求,其余可根据当地道路特点进行交通信号灯设置。
云控平台
智能网联汽车测试场宜部署云控平台,为智能网联汽车和智能路侧设备数据交互提供标准认证、车辆与路侧系统数据分析及存储、测试场环境与测试过程监控、以及提供车路协同感知、决策与控制辅助与增强等能力。
云控平台应满足以下要求:
a)支持智能网联测试车辆、智能路侧设备数据交互的标准化CA认证服务;
b)支持与第三方云平台的数据对接,数据接收时延低于100 ms;
c)对所测试车辆、路侧设备进行标准化数据采集、存储和分析,并按照管理要求实时动态监控测试过程;
d)实时为测试车辆、测试场交通指示设备提供融合车路信息的感知、决策与控制辅助计算服务,包括提供协同感知数据,驾驶决策和控制建议,交通系统控制建议,以及驾驶行为提示、预警、引导等一系列云端计算结果,相关计算服务需保证满足车辆测试功能的周期时延要求;
e)支持第三方应用在云平台上按照标准开发接口与开发要求进行仿真测试和实际环境测试。
基础自动驾驶功能
A.1车速保持
自动驾驶车辆通过纵向控制保持车辆以安全车速稳定行驶的能力,包括正确识别限速标牌信息,并按限速标牌要求车速稳定行驶。车速保持主要包括直道车速保持和弯道车速保持两种道路类型的测试。
A.2车道保持
自动驾驶车辆通过横向控制保持车辆在车道内行驶的能力。车道保持主要包括直道车道保持和弯道车道保持两种道路类型的测试。
A.3跟车行驶
自动驾驶车辆通过横向和纵向控制,使自车能够跟随前方车辆在车道内稳定行驶,如遇车道线暂时丢失的情况,自车应能在有效探测距离内跟随前车行驶轨迹继续安全行驶。跟车行驶主要包括直道跟车行驶和弯道跟车行驶两种道路类型的测试。
A.4并道行驶
自动驾驶车辆在有并道行驶需求时(包括本车道前方车道数减少,前方有低速车辆等),实现主动并道任务,并在不干扰其他交通参与者的前提下,安全稳定的行驶到对应的相邻车道。并道行驶主要包括直道并道行驶和弯道并道行驶两种道路类型的测试。
A.5超车
自动驾驶车辆在遇到前方低速行驶车辆时,主动向左侧变道超越原车道低速车辆后,并回到原车道继续行驶。超车主要包括借左侧同向相邻车道超车和借左侧逆向车道超车,均为直道超车一种道路类型的测试。
A.6驶入/驶出匝道
自动驾驶车辆驶出高速公路或城市快速路进入匝道,或通过匝道并入高速公路或城市快速路的过程。驶入/驶出匝道主要包括驶入匝道和驶出匝道两种道路类型的测试。
A.7交叉路口通行
自动驾驶车辆按路径规划安全通过交叉路口到达相应的路径规划终点(例如车辆左转车道左转通行,右转车道右转通行等)。交叉路口通行主要有十字交叉路口道路类型的测试。
A.8环形路口通行
自动驾驶车辆按路径规划绕环岛稳定行驶,并从指定出口驶出环岛。环形路口通行主要有十字环岛道路类型的测试。
A.9交通信号灯通行
自动驾驶车辆在通过交通信号灯路口时正确识别交通信号灯并做出相应的响应,不出现闯红灯或在绿灯情况下车辆识别具备安全通行条件却停车不前等状况。交通信号灯通行主要有交通信号灯十字交叉路口一种道路类型的测试。
A.10施工区域通行
自动驾驶车辆在遇到前方施工区域或者有施工区域标识时,能够避让施工区域安全通行。施工区域通行主要包括直道施工区域通行和弯道施工区域通行两种道路类型的测试。
A.11前方车辆变道识别与避让
自动驾驶车辆在遇到前方车辆有变更车道行为时(例如前方相邻车道车辆切入,前方本车道车辆切出等场景),能够识别并避让前方车辆变更车道行为并顺利通行。前方车辆变道识别与避让主要包括直道前方车辆变道识别与避让和弯道前方车辆变道识别与避让两种道路类型的测试。
A.12道路弱势群体避让通行
自动驾驶车辆应能够识别行进路线上的道路弱势群体,避免与其发生碰撞并顺利通行。道路弱势群体避让通行主要包括直道道路弱势群体避让通行和弯道道路弱势群体避让通行两种道路类型的测试。
A.13障碍物避让通行
自动驾驶车辆在遇到障碍物时能够避让通行,且对不影响车辆正常行驶的障碍物不能有明显的非正常反应。障碍物避让通行主要包括直道障碍物避让通行和弯道障碍物避让通行两种道路类型的测试。
A.14N型掉头
自动驾驶车辆在较窄的路段进行掉头时,通过前后反复移动调整车辆方向实现车辆的掉头行驶。N型掉头主要有直道N型掉头一种道路类型的测试。
A.15U型掉头
自动驾驶车辆在较宽敞的路段进行掉头时,通过一次车辆方向调整实现车辆的掉头行驶。U型掉头主要有直道U型掉头一种道路类型的测试。
A.16靠边停车
自动驾驶车辆在路径规划、系统故障等原因导致自动驾驶系统需要进行停靠路边情况下,准确安全地停靠在路边相对安全区域。靠边停车主要有直道靠边停车一种道路类型的测试。
A.17避让对向来车
自动驾驶车辆通过探测对向占用本车车道超车行驶的车辆,并通过制动、转向避让等行为避免发生碰撞实现避让通行。避让对向来车主要有直道避让对向来车一种道路类型的测试。
A.18网联通信
自动驾驶车辆通过车车、车路、车人等通信,使车辆能够根据接收到的行驶环境信息进行相应的决策规划并安全通行。网联通信主要包括直道网联通信和十字交叉路口网联通信两种道路类型的测试。
A.19自动泊车
自动驾驶车辆通过横向和纵向控制,自动将车辆安全驶入或者驶出相应的停车位。自动泊车主要包括平行式车位、垂直式车位和斜列式车位三种停车位类型的测试。
以上是关于汽车智能技术学些啥?的主要内容,如果未能解决你的问题,请参考以下文章