如何评价高博的《视觉SLAM十四讲》?
Posted
tags:
篇首语:本文由小常识网(cha138.com)小编为大家整理,主要介绍了如何评价高博的《视觉SLAM十四讲》?相关的知识,希望对你有一定的参考价值。
SLAM技术在上个世纪90年代的电脑游戏里就开始应用了,你在玩星际争霸游戏的时候,每个小兵拨开迷雾向前运动都和SLAM算法分不开。在几百块钱的扫地机器人里,用一个几十块钱的嵌入式单板+几块钱的红外传感器+1块钱的玩具电机就完成了对房间的遍历,完成房间的清扫。说实话,这些算法里都用不着状态估计,别说李代数了,就连线性代数都不用。机器人的位置估计,利用红外传感器更简单更准确更有效,是不需要非用摄像头来做的。而且大部分实际应用中机器人其实根本不需要估计自己的位置,机器人只需要找到目标,向目标移动,遇到障碍进行避障即可。如果视觉系统找不到目标,则对所在的房间进行遍历。
所以在孤陋寡闻的我看来,SLAM技术差不多到2000年左右,就根本用不着什么创新了。机器人工程应用中真正使用摄像头和视觉要解决的问题,是要让机器人理解哪里是客厅,哪里是厨房,哪里有电冰箱,当主人发出指令来冰箱这里,机器人能够自己移动到冰箱附近,能够打开冰箱门,能够拿东西。这是一个四岁或者五岁孩子到了一个陌生环境中,能够自己去观察环境之后,听到大人的指令就能完成的事情。这是今天真正创新要做的事情。你的状态估计不仅仅是三维空间内部的估计,更要在视觉语义空间中进行。视觉语义空间则是要让机器人建立和人类共同的对周围环境的理解。因为机器人进行的三维空间建模是无法和人直接沟通的。而只有对房间的视觉语义空间进行建模,才真正的能够和人沟通,解决实际应用问题。能做到这个,那就NB大了!
希望对初学者和slam感兴趣人员有帮助。
当然400页纸绝对会有bug和问题。如果发现的话请联系我。代码我第一时间改,书的内容可能要等一波修订,不过也会改。
但是编译有错、链接有错的话,请尽量自己搞定。我基本每天早上都会看到q里有人让我调bug,这会影响到起床的心情。另外我不管销售,也没指着卖书挣钱(每卖一本我大概会拿到一块几毛钱的版税……)。我写它是因为我想写,另一个也确实缺这方面资料。
书里数学部分写的比较精炼,代码也多是示例性质。想学好请多加练习。
网上有些宣传把我吹的太过了,让我感到惶恐。我只是个普通的研究人员。喜欢搞学术,但做东西是凭文字和代码说话,并不凭粉丝数量……你学会了是你的东西,你仅是收藏的话当然也可以。
“任何一个有智力的笨蛋都可以把事情搞得更大,更复杂,也更激烈。往相反的方向前进则需要天份,以及很大的勇气。”——爱因斯坦
与诸君共勉。
我就不自吹自擂了,总之对各位有帮助就好。内容还是偏基础了一些,很多工具还得靠大家自己进一步研究。
现在草稿正在出版社审查,下个月应该就能跟读者见面了。b站有前七讲的视频但是我最近没时间更新…
还有,有没有哪位大佬愿意给我写个推荐语的啊?网上有些宣传把我吹的太过了,让我感到惶恐。我只是个普通的研究人员。喜欢搞学术,但做东西是凭文字和代码说话,并不凭粉丝数量……你学会了是你的东西,你仅是收藏的话当然也可以。
视觉SLAM是一个视觉问题的小分支,但是涉及的知识点繁杂错乱,对于想入门学习SLAM的人来说,一头扎进教科书,从『1+1』这样的知识点开始学将会非常痛苦。窃以为比较针对性的SLAM书籍应该是从系统上层讲清楚SLAM的职责和经典结构,然后对于经典SLAM系统分解,就其中重要的组件和涉及到的知识点进行讲解,并辅以代码实例供初学者把玩……不出一个月……顶多两个月,你就可以对SLAM的经典问题有个由上到下的理解,不说立马能进入研发状态,但跟别人吹吹牛是没有问题的了…
浅读《视觉SLAM十四讲:从理论到实践》--操作1--初识SLAM
下载《视觉SLAM十四讲:从理论到实践》源码:https://github.com/gaoxiang12/slambook
第二讲:初识SLAM
2.4.2 Hello SLAM(书本P27)
1、从github上下载源码,并解压
Ubuntu上,解压zip,先找到zip文件所在位置,然后运行下面代码,进行解压。
unzip slambook-master.zip
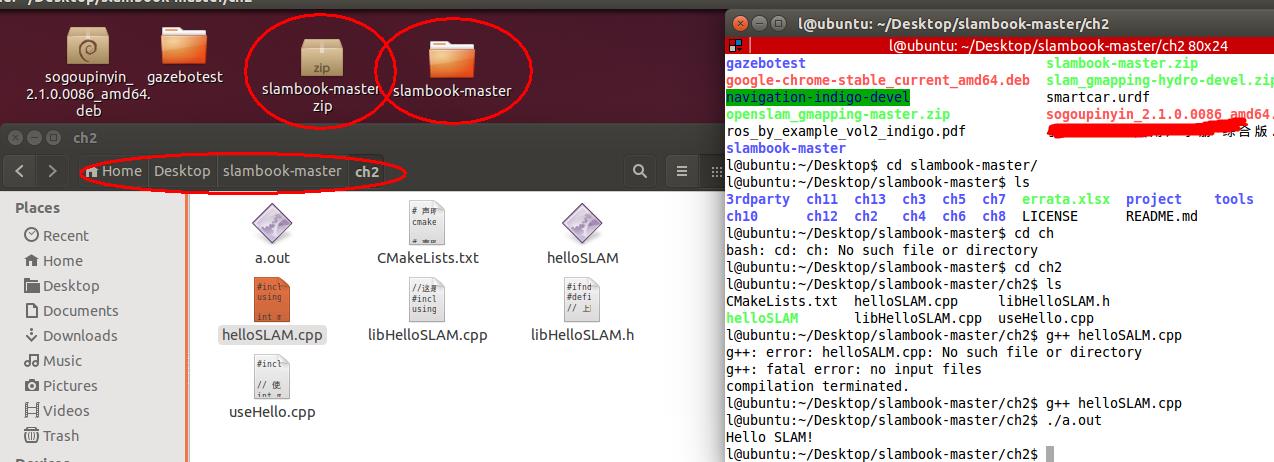
解压后,找到ch2文件夹,在文件夹中找到helloSLAM.cpp文件
运行cpp文件
g++ helloSLAM.cpp
如未安装g++,则执行下述代码
sudo apt-get install g++
运行helloSLAM.cpp后,文件夹中会出现a.out文件
在终端输入下面代码,即可实现输出:Hello SLAM!
./a.out
2.4.3使用cmake
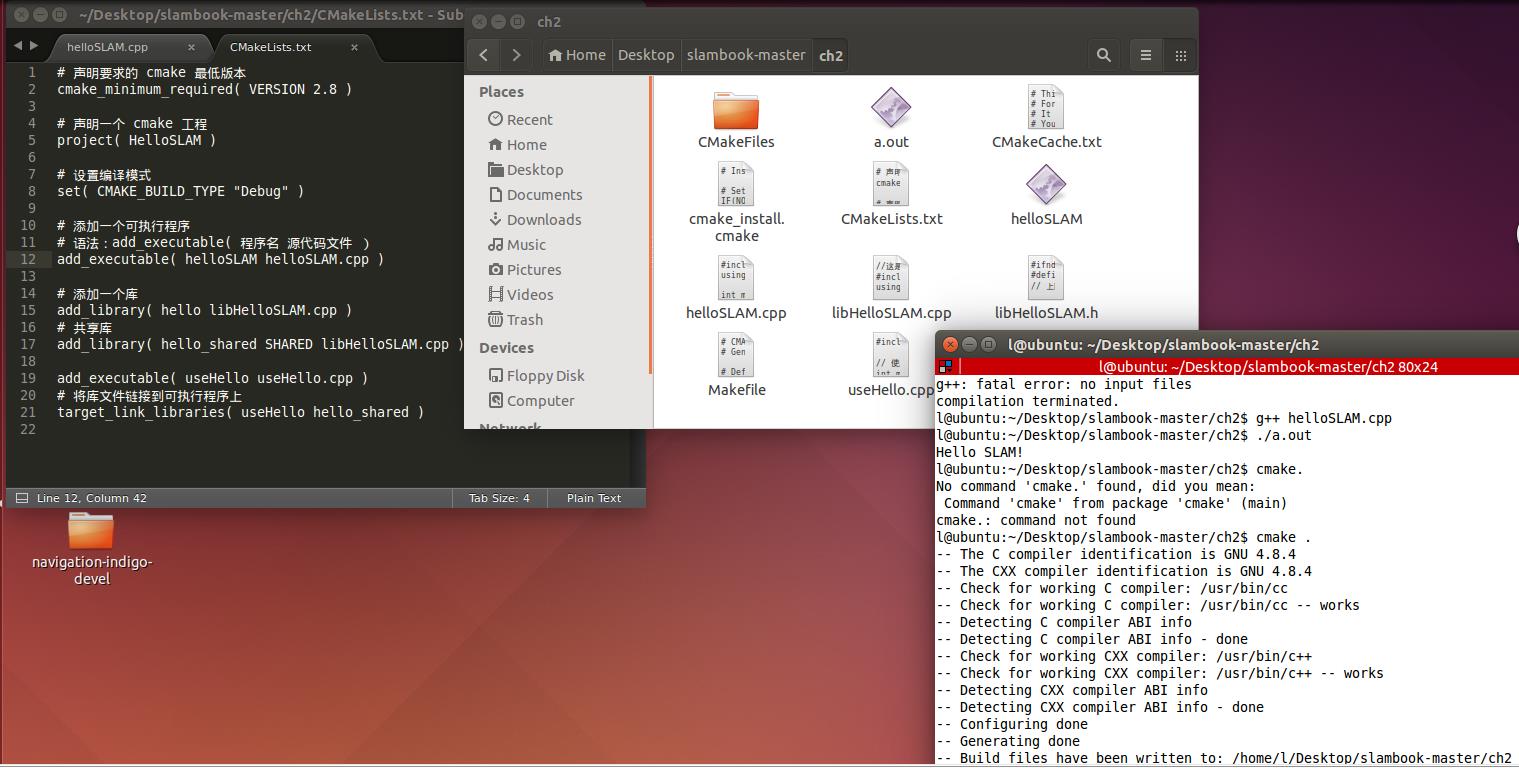
2.4.2采用的是g++,2.4.3采用的是cmake-make
Ubuntu 14.04 安装Kdevelop
http://www.cnblogs.com/lvchaoshun/p/6250649.html
以上是关于如何评价高博的《视觉SLAM十四讲》?的主要内容,如果未能解决你的问题,请参考以下文章
视觉SLAM十四讲 报错 Could not find a configuration file for package “OpenCV“ that is compatible with reques